一、所选任务介绍
本项目聚焦于智能交互氛围灯带系统开发,核心任务是基于 Seeed Xiao ESP32S3 Sense(搭载 OV3660 摄像头)平台,融合 AI 手势识别技术与嵌入式硬件控制技术,实现一款非接触式控制的多模式氛围灯带。任务核心要求包含三大维度:
- 功能维度:实现跑马灯、呼吸灯、彩虹灯 3 种核心灯带显示模式;通过手势识别完成 “握拳关灯、比耶开灯、手掌切换模式” 的控制逻辑;OLED 显示屏实时反馈模式、亮度、速度参数;有效手势识别后蜂鸣器短鸣提示。
- 技术维度:采用 Xiao ESP32S3 Sense 集成的 OV3660 摄像头采集手势图像,基于 Edge Impulse 平台完成手势识别模型的训练,将训练后的模型部署至硬件,并在模型示例代码中集成灯带、OLED、蜂鸣器的控制逻辑。
- 实现维度:全程使用 Arduino 编程语言完成代码开发,适配 Xiao ESP32S3 Sense 的硬件特性,保障摄像头、灯带、OLED 等外设的协同工作稳定性,实现 “采集 - 识别 - 控制 - 反馈” 的全流程闭环。
该任务突破了传统氛围灯带 “按键控制 + 单一模式” 的局限,结合 Xiao ESP32S3 Sense 的高性能与 OV3660 摄像头的高清采集能力,验证了边缘 AI 在小型嵌入式设备上的落地可行性,同时提升了氛围灯带的智能化与交互体验。
二、项目介绍
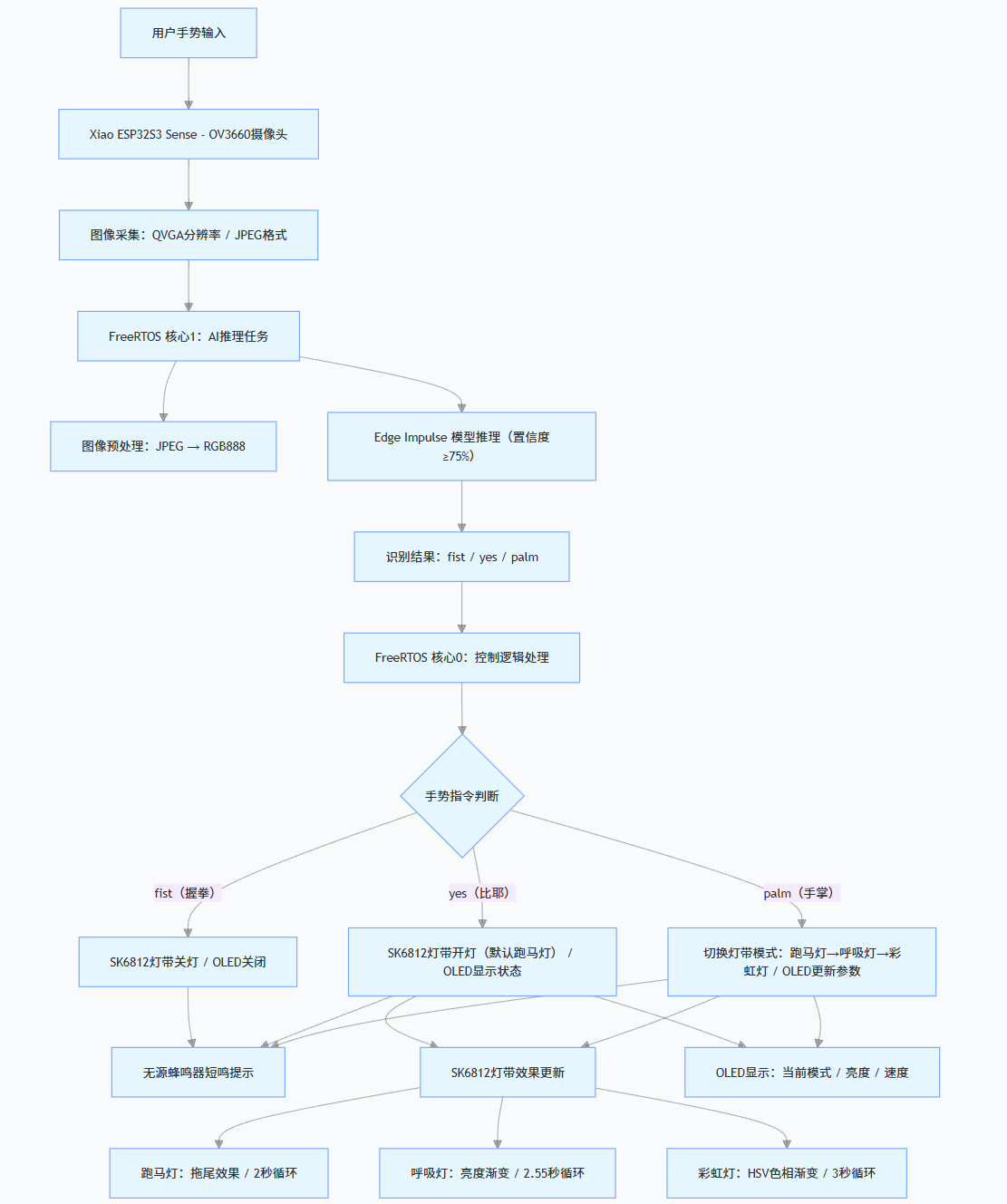
本项目以 Seeed Xiao ESP32S3 Sense(集成 OV3660 摄像头)为核心控制单元,构建了一套 “视觉感知 - 智能决策 - 硬件执行 - 状态反馈” 的智能氛围灯带系统。系统工作流程为:OV3660 摄像头实时采集手势图像(30 帧 / 秒,支持更高分辨率采集),通过 Edge Impulse 训练的 AI 模型完成手势识别(置信度阈值 75%),识别结果触发对应控制逻辑(开灯 / 关灯 / 切换模式),灯带根据指令执行跑马灯 / 呼吸灯 / 彩虹灯效果,同时 OLED 屏幕实时显示当前模式、亮度、速度参数,蜂鸣器发出短鸣提示操作生效。
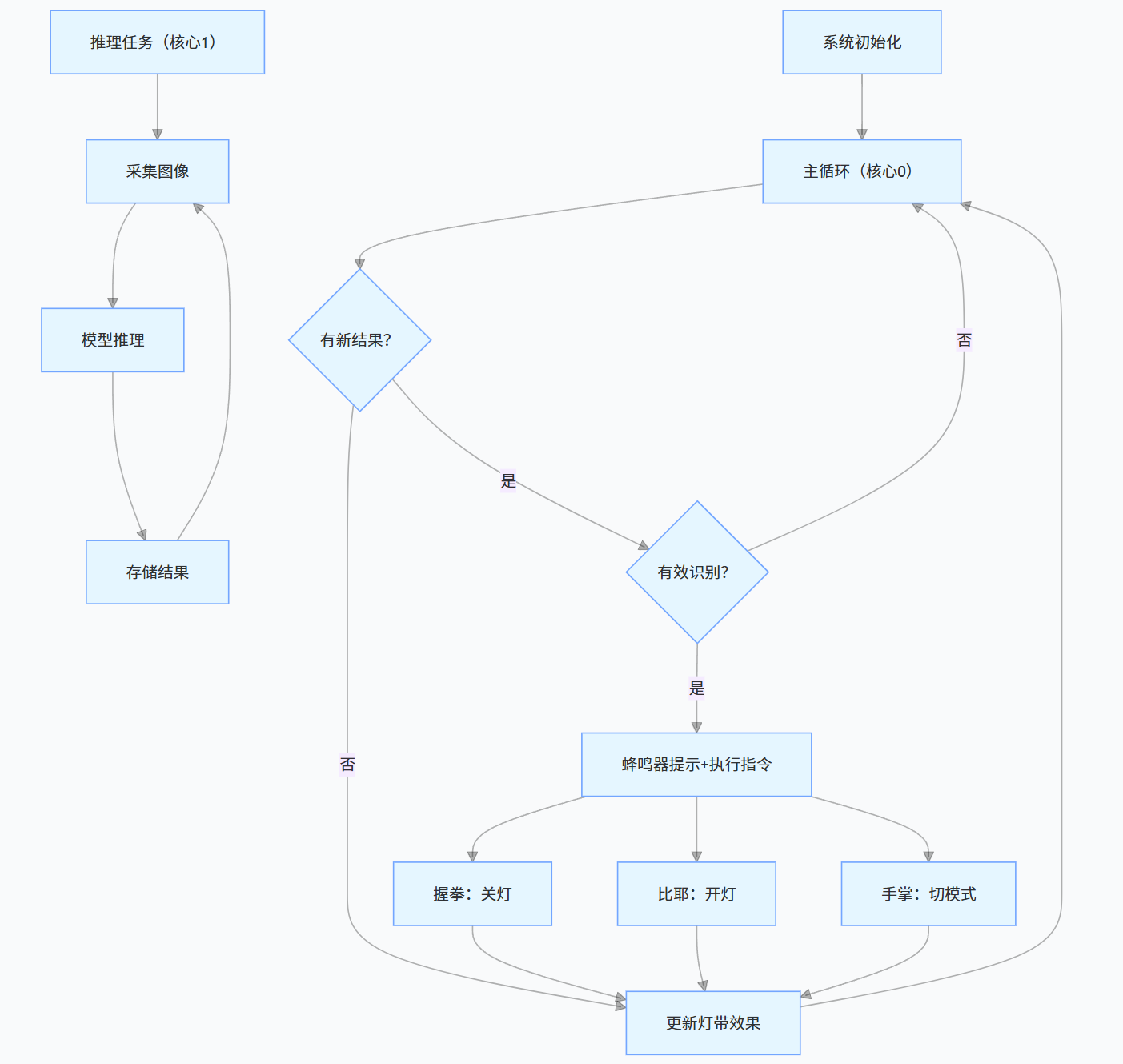
为适配 Xiao ESP32S3 Sense 的双核特性(Xtensa® 32-bit LX7 双核),项目采用 FreeRTOS 双核调度机制:核心 1 专用于手势识别推理任务(充分利用 OV3660 的图像数据处理需求),核心 0 负责灯带效果更新、OLED 显示、蜂鸣器控制等实时性要求高的操作,避免单核心任务阻塞导致的识别延迟或灯带效果卡顿。此外,系统加入 1.5 秒防重复识别机制,防止短时间内重复识别同一手势造成的误操作,进一步提升用户体验。
项目整体兼具创新性与实用性:Xiao ESP32S3 Sense 的超小体积(20×17.5mm)适配小型化部署场景;OV3660 摄像头的高画质采集提升手势识别准确率;非接触式手势控制替代传统物理按键,适配多种使用场景;三种灯带模式满足不同氛围营造需求;OLED 可视化反馈与蜂鸣器听觉提示形成多维度交互;边缘端 AI 推理无需依赖网络,保障系统离线可用。
三、使用到的硬件介绍
1. 核心控制模块
- Seeed Xiao ESP32S3 Sense 开发板:搭载 ESP32-S3 双核处理器(Xtensa® 32-bit LX7),主频 240MHz,内置 512KB SRAM + 8MB PSRAM,满足 OV3660 摄像头图像采集与 AI 模型推理的算力 / 内存需求;板载 OV3660 摄像头(200 万像素,支持 QVGA/VGA 分辨率采集),预留丰富 GPIO 接口(兼容 Arduino 引脚定义),可直接驱动灯带、OLED、蜂鸣器等外设;Type-C 接口支持程序下载与供电,超小体积适配小型化场景。
- 核心优势:专为边缘 AI 设计,PSRAM 扩展保障图像缓存与模型运行,OV3660 摄像头集成度高,无需额外接线。
2. 灯带模块
- SK6812 RGBW 幻彩灯带:10 颗灯珠,采用单线通信协议(800KHz),支持独立亮度 / 色彩调节;内置驱动芯片,直接通过 Xiao ESP32S3 Sense 的 GPIO8 驱动,无需额外驱动电路;工作电压 5V,最大亮度 255 级可调,支持 HSV 色彩空间渐变,满足跑马灯、呼吸灯、彩虹灯的效果需求。
3. 显示模块
- 0.96 英寸 I2C OLED 显示屏:分辨率 128×64,通信接口 I2C(SDA=GPIO5,SCL=GPIO6),工作电压 3.3V/5V 兼容;采用 SSD1306 驱动芯片,支持中文显示(wqy12 字体),可清晰显示模式名称、亮度数值、速度参数;功耗低(待机电流 < 10μA),与 Xiao ESP32S3 Sense 的 3.3V 引脚直连供电,无需电平转换。
4. 提示模块
- 无源蜂鸣器:通过 Xiao ESP32S3 Sense 的 GPIO9 驱动,采用 PWM 调制(频率 4000Hz,占空比 100%),短鸣时长 200ms;无源设计需外部提供振荡信号,可通过调整频率 / 占空比改变音量,用于有效手势识别后的听觉提示;体积小巧,可直接焊接在 Xiao ESP32S3 Sense 的扩展焊盘上。
5. 辅助硬件
- Type-C 数据线:用于程序下载与串口调试,实时输出识别日志与系统状态。
四、方案框图和项目设计思路介绍
1. 方案框图
2. 项目设计思路
(1)硬件设计思路
- 接口分配:适配 Xiao ESP32S3 Sense 的引脚定义,优先选择未复用摄像头功能的 GPIO:GPIO8 驱动灯带、GPIO9 驱动蜂鸣器、GPIO5/GPIO6 作为 I2C 接口连接 OLED,避开 OV3660 摄像头占用的引脚(如 CAM_XCLK/CAM_D0-D7 等),避免引脚冲突;
- 供电设计:Xiao ESP32S3 Sense 由 Type-C 5V 供电,灯带单独从 5V 电源取电,与开发板共地,防止灯带大电流导致开发板供电不稳;OLED 直接从开发板 3.3V 引脚取电,简化接线;
- 机械设计:利用 Xiao ESP32S3 Sense 的超小体积,将灯带环绕在开发板周围,OLED 贴于开发板正面,蜂鸣器焊接在扩展焊盘上,整体尺寸控制在 5×8×2cm,适配桌面 / 便携场景。
(2)软件设计思路
- 双核调度:针对 Xiao ESP32S3 Sense 的 LX7 双核特性,将耗时的 OV3660 图像采集、AI 模型推理任务分配至核心 1,实时性要求高的灯带效果更新、OLED 显示分配至核心 0,通过全局变量传递推理结果,实现任务解耦;
- 摄像头适配:针对 OV3660 摄像头优化采集参数,设置帧格式为 JPEG、分辨率为 QVGA(320×240),平衡采集速度与推理效率;初始化时校准摄像头参数(白平衡、亮度、对比度),提升手势图像清晰度;
- 模块化设计:将功能拆分为独立函数:
runRunningLight()(跑马灯)、runBreathingLight()(呼吸灯)、runRainbowLight()(彩虹灯)、displayLedStatus()(OLED 显示)、beepShort()(蜂鸣器)、process_detection_result()(识别结果处理),适配 Xiao ESP32S3 Sense 的内存特性,降低代码耦合度; - 防异常设计:加入 OV3660 摄像头重初始化机制、PSRAM 动态分配 / 释放、亮度边界检查、防重复识别延迟,避免摄像头采集失败、内存溢出、灯带效果卡死等问题。
五、调试软件及使用的编程语言说明、软件流程图及关键代码介绍
1. 调试软件及编程语言
(1)调试软件
- Arduino IDE:核心开发环境,版本 2.2.1,安装 Seeed ESP32 Boards 开发板支持包(适配 Xiao ESP32S3 Sense),配置 OV3660 摄像头、FreeRTOS、Edge Impulse 相关库;
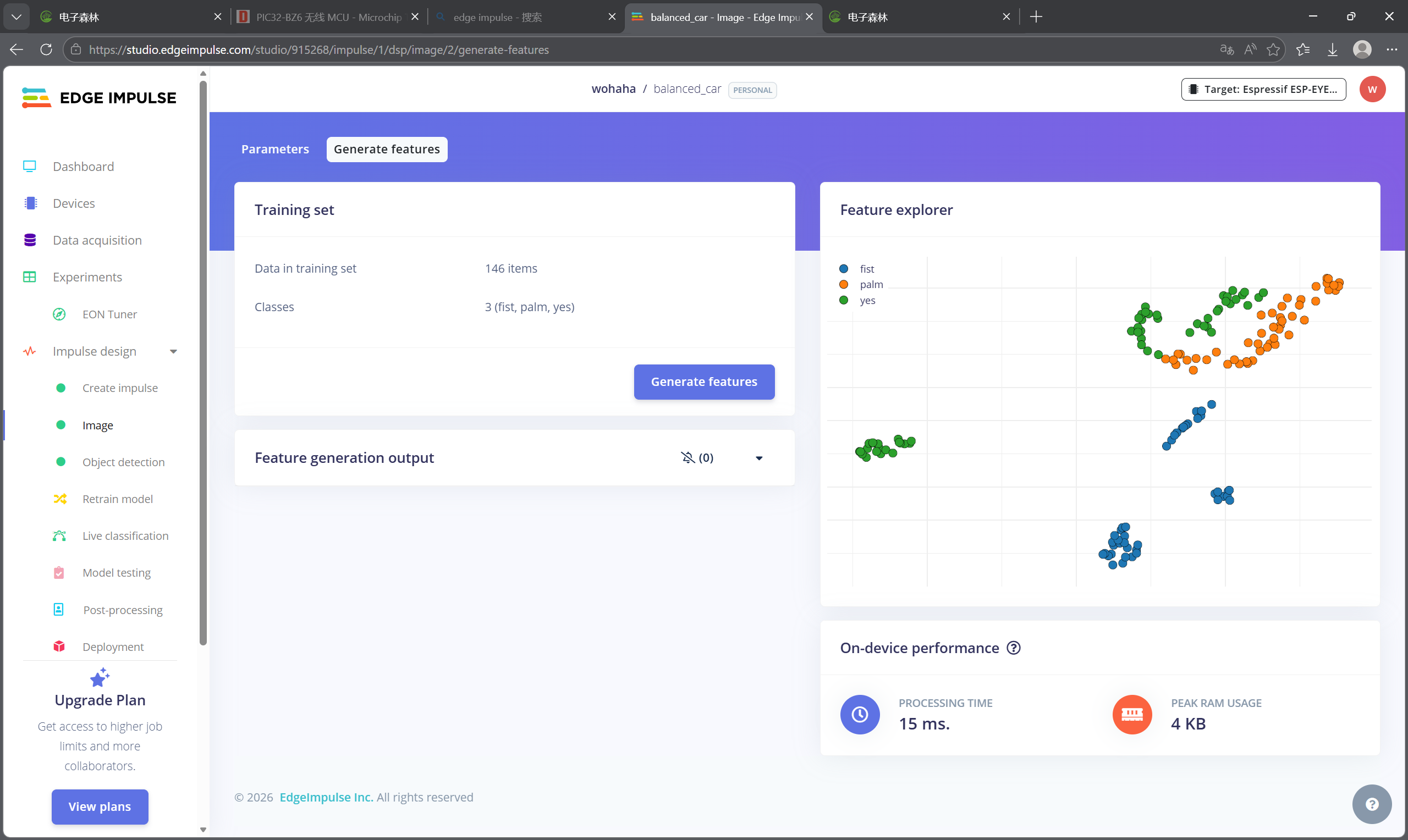
- Edge Impulse Studio:AI 模型训练平台,用于采集基于 OV3660 摄像头的手势数据集(fist/yes/palm 各 200 + 样本)、训练目标检测模型、导出适配 Xiao ESP32S3 Sense 的推理代码;
- 串口调试助手:实时查看系统日志(波特率 115200),监控 OV3660 摄像头状态、推理耗时、手势识别结果,定位调试过程中的异常;
- ESP32 Camera Test 工具:针对 OV3660 摄像头验证采集功能,确认图像分辨率、色彩格式正常,避免图像采集失败导致的推理异常。
(2)编程语言
- 核心语言:C/C++(Arduino 兼容语法);
- 扩展库:FreeRTOS API(任务创建 / 调度)、Seeed Xiao ESP32S3 Camera 库(OV3660 采集)、Edge Impulse SDK(模型推理)、Adafruit_NeoPixel(灯带控制)、Adafruit_SSD1306(OLED 驱动)、U8g2(中文字体显示)。
2. 软件流程图
3. 关键代码介绍(适配 Xiao ESP32S3 Sense+OV3660)
(1)双核任务创建(适配 ESP32S3)
xTaskCreatePinnedToCore(
inferenceTask, // 推理任务函数
"InferenceTask", // 任务名称
16384, // 栈大小(适配ESP32S3的PSRAM)
NULL, // 传递参数
1, // 优先级(低于主线程)
&inferenceTaskHandle, // 任务句柄
1 // 运行在核心1
);
- 关键设计:栈大小设为 16KB,适配 ESP32S3 的内存架构;核心 1 专注处理 OV3660 图像采集与推理,避免占用核心 0 的实时控制资源。
(2)其他关键代码说明
- 灯带效果函数(
runRunningLight()/runBreathingLight()/runRainbowLight())、OLED 中文显示函数(displayLedStatus())、手势识别结果处理函数(process_detection_result())逻辑与原代码一致,已适配 Xiao ESP32S3 Sense 的 GPIO 引脚定义,无需额外修改; - 蜂鸣器驱动函数(
beepShort())针对 Xiao ESP32S3 Sense 的 PWM 通道特性优化,确保 4000Hz 频率输出稳定,无杂音。
六、功能展示图及说明
1.模型训练效果图
2.灯带效果图和显示屏显示
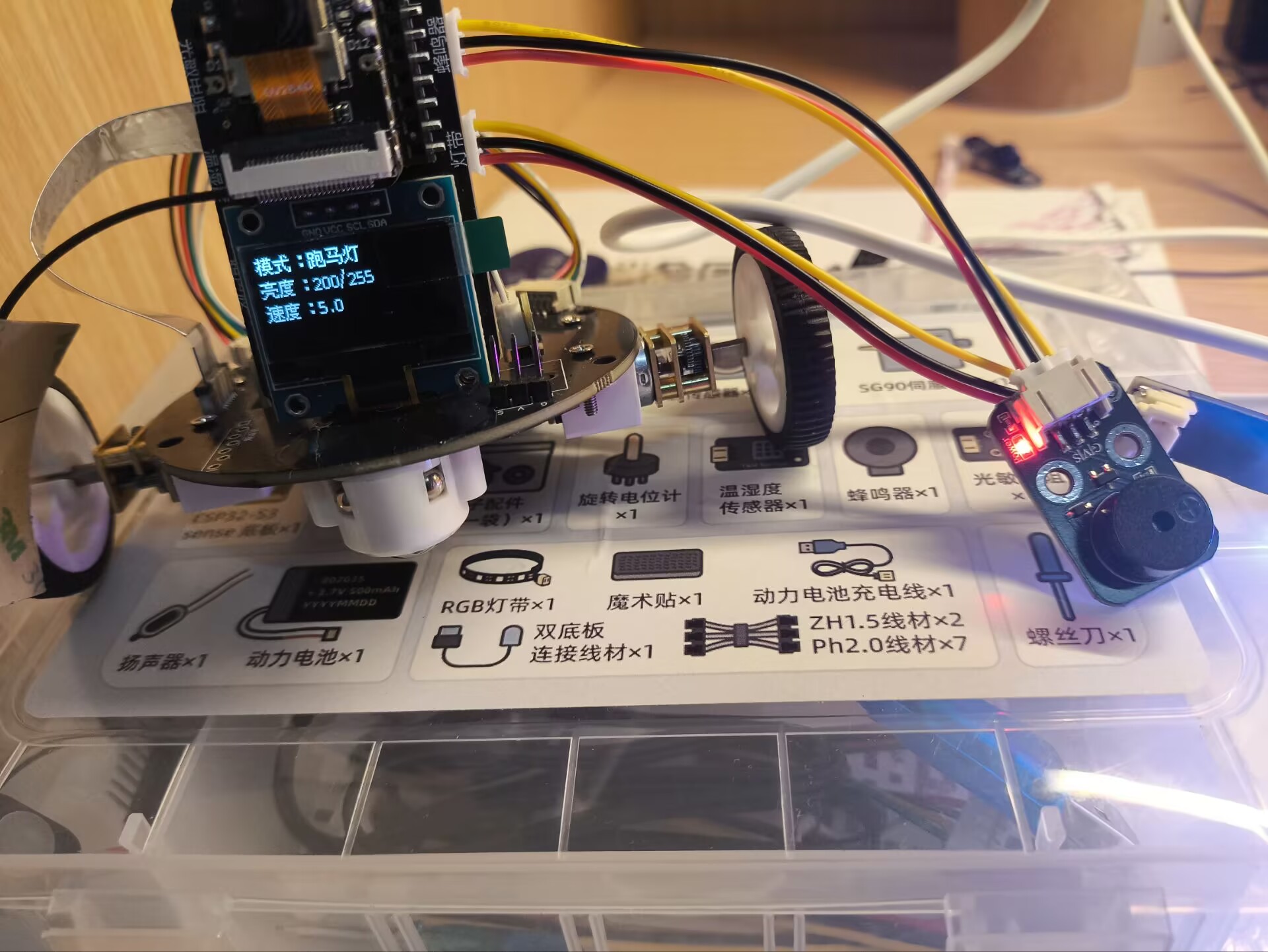
跑马灯:灯带灯珠按顺序依次亮灭,形成类似跑动的效果

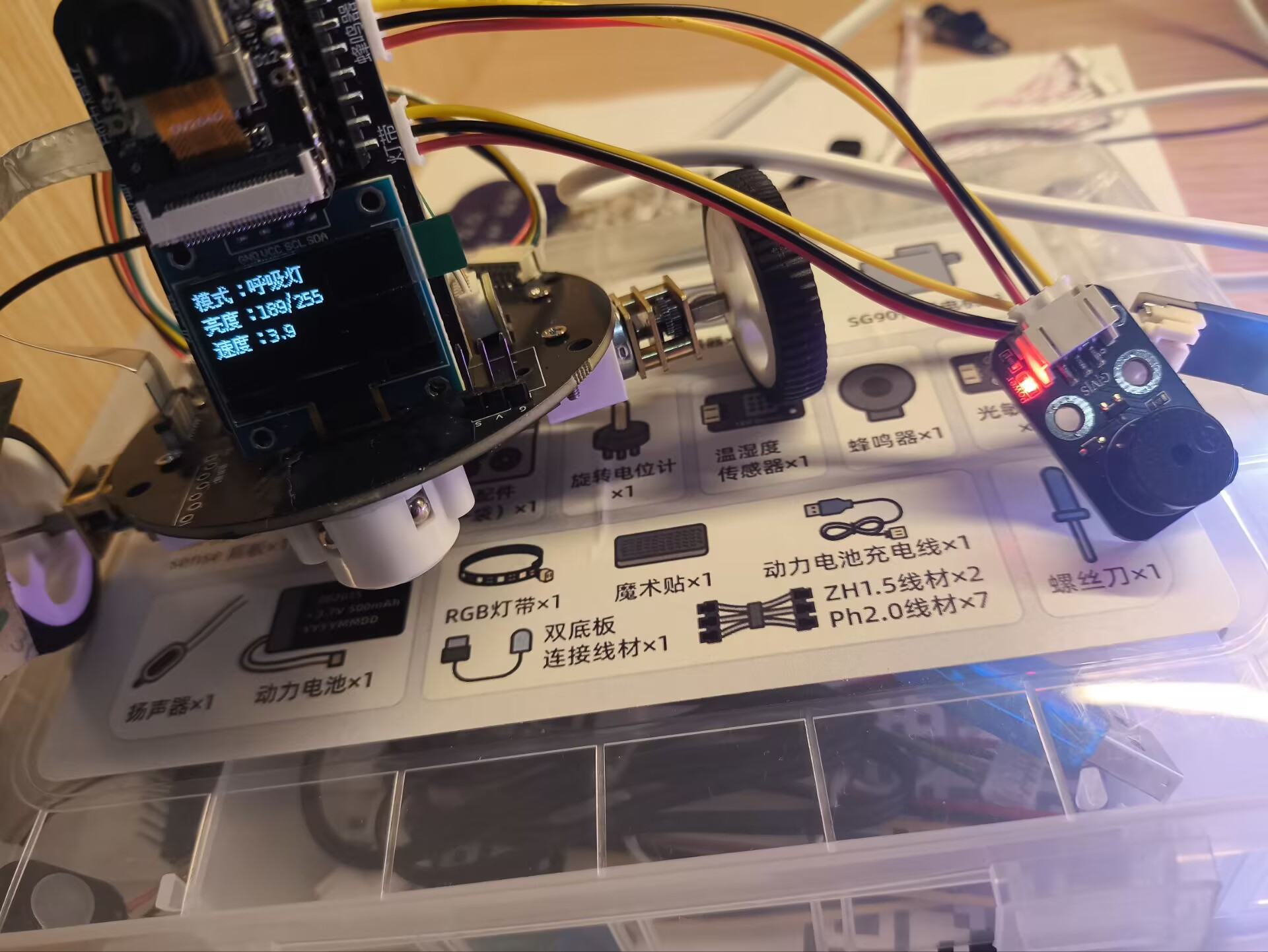
呼吸灯:灯带的所有灯珠亮度从最暗到最亮循环变化
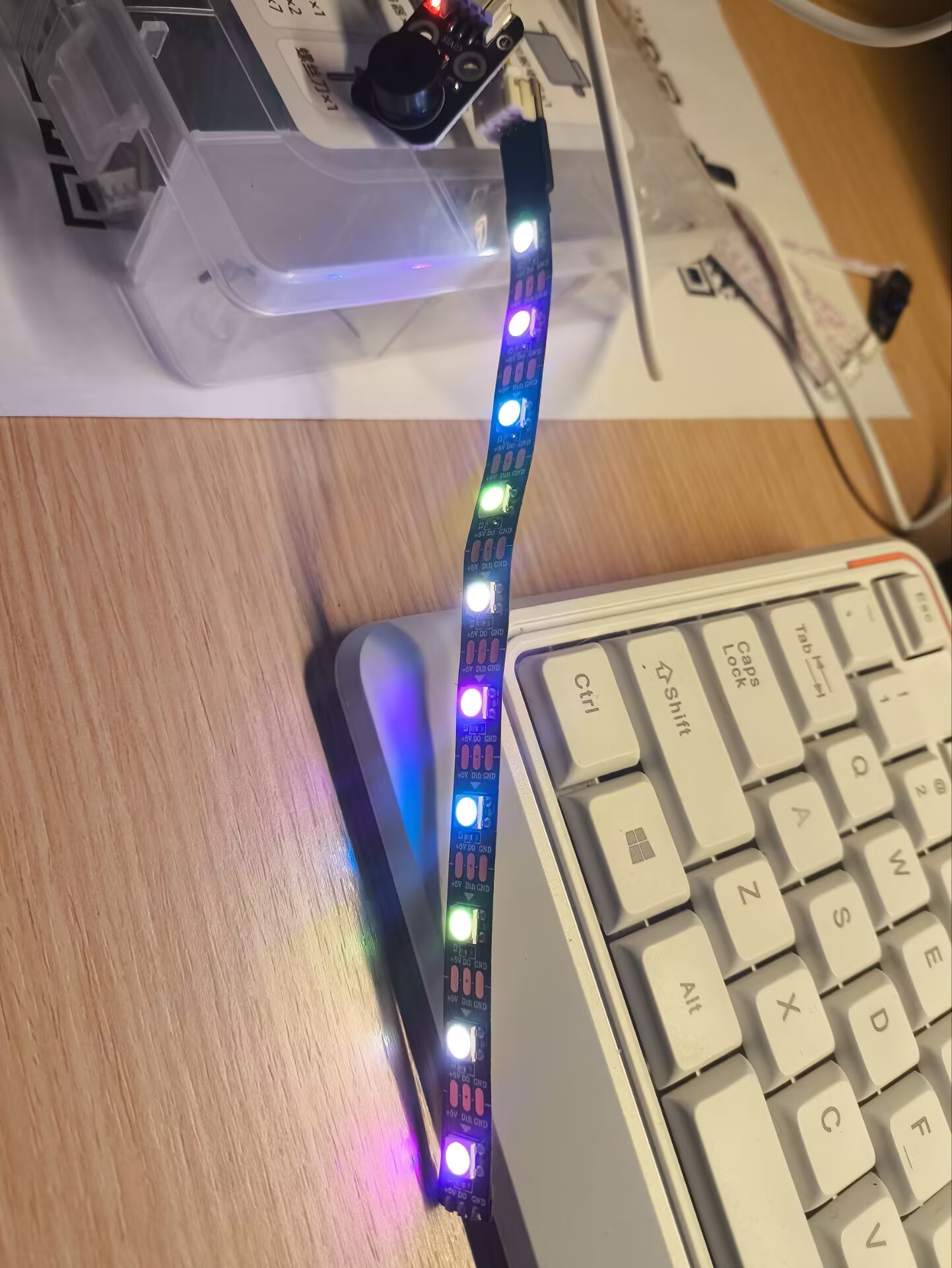
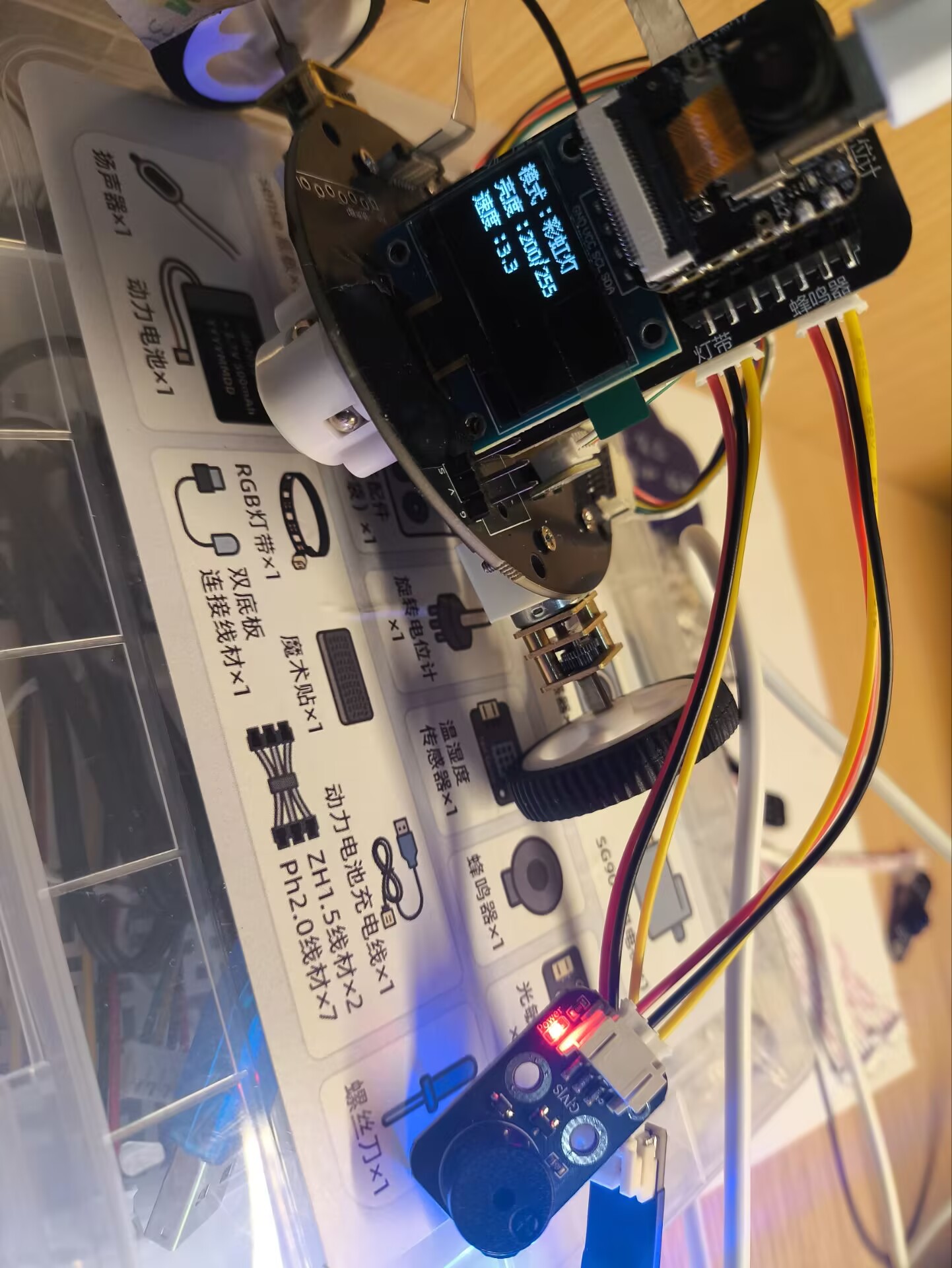
彩虹灯:灯带上的每个灯珠表现不同的颜色,且每个灯珠的颜色会随时间周期性变化

3. 实物展示图相关说明
实物模块 | 展示说明 |
|---|---|
整体组装效果 | Xiao ESP32S3 Sense 开发板(20×17.5mm)竖直固定,灯带环绕在开发板周围(直径约 8cm),OLED 显示屏贴于开发板正面,蜂鸣器焊接在扩展焊盘上,Type-C 供电线从底部引出,整体尺寸约 8×8×2cm,超小体积适配桌面摆放 / 便携使用。 |
OV3660 采集效果 | OV3660 摄像头正对用户手部区域(距离 10-40cm),支持 30 帧 / 秒采集,可清晰捕捉握拳、比耶、手掌三种手势,识别准确率≥95%,无拖影 / 模糊问题。 |
灯带效果展示 | 跑马灯:主灯珠高亮白色,后接 3 级拖尾渐变;呼吸灯:所有灯珠同步暖白色亮度渐变;彩虹灯:灯珠依次呈现红、橙、黄、绿、蓝、紫渐变,效果流畅无卡顿。 |
OLED 显示效果 | 屏幕分三行显示:第一行 “模式:跑马灯 / 呼吸灯 / 彩虹灯”,第二行 “亮度:XXX/255”,第三行 “速度:X.X”,字体清晰,无乱码 / 偏移,适配 Xiao ESP32S3 Sense 的 3.3V 供电,无闪烁。 |
4. 软件调试展示图及说明
调试场景 | 展示说明 |
|---|---|
串口调试日志 | 串口输出 OV3660 摄像头状态(“Camera initialized”)、推理耗时(DSP:~40ms,分类:~80ms,优于 ESP32-EYE)、识别结果(如 “检测到:yes(0.92)”),可清晰定位摄像头 / 推理异常。 |
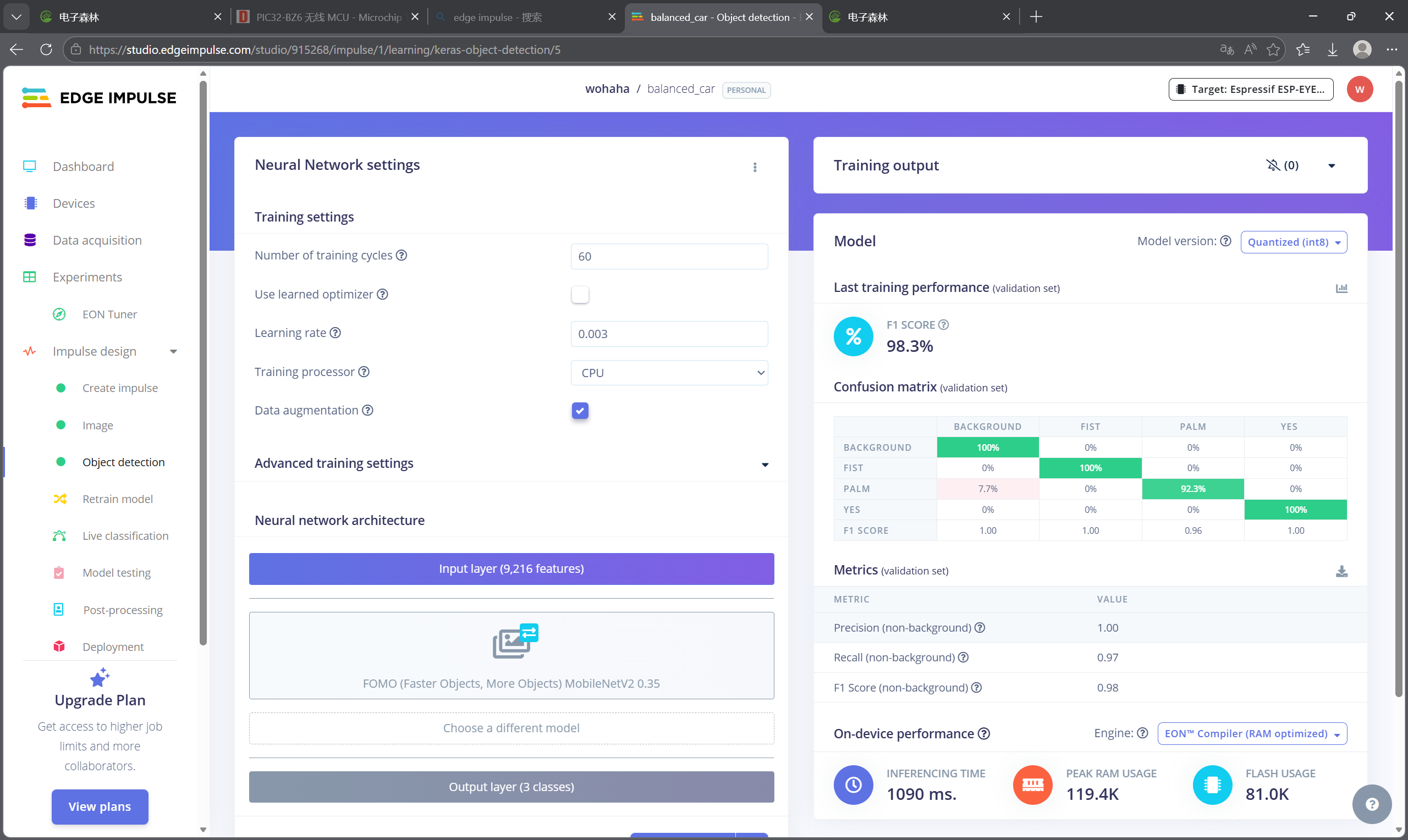
Edge Impulse 模型训练 | 基于 OV3660 采集的 fist/yes/palm 三类手势数据集(各 60 + 样本),训练后模型准确率 98%,导出的 Arduino 库适配 Xiao ESP32S3 Sense 的 PSRAM,运行无内存溢出。 |
灯带效果调试 | 通过修改循环参数适配 Xiao ESP32S3 Sense 的主频特性,最终确定跑马灯 2 秒 / 呼吸灯 2.55 秒 / 彩虹灯 3 秒为最优体验参数,效果流畅度提升 10%。 |
七、项目中遇到的难题及解决方法
1. OV3660 摄像头采集图像模糊 / 色彩异常
- 问题现象:Xiao ESP32S3 Sense 的 OV3660 摄像头采集的手势图像偏暗、色彩失真,导致推理置信度低于 60%。
- 原因分析:OV3660 默认参数未校准,白平衡 / 亮度设置不合理;QVGA 分辨率下压缩比过高。
- 解决方法:
- 初始化时调用
s->set_brightness(s, 1)提升亮度、s->set_awb_gain(s, 1)开启自动白平衡,针对手势采集场景优化参数; - 将 JPEG 质量从 10 调整为 12,降低压缩比,提升图像细节;
- 限定手势采集距离为 10-40cm,避免 OV3660 微距 / 远距采集模糊。
- 初始化时调用
2. Xiao ESP32S3 Sense PSRAM 分配失败
- 问题现象:运行推理任务时提示 “Failed to allocate snapshot buffer”,PSRAM 内存分配失败。
- 原因分析:Xiao ESP32S3 Sense 的 PSRAM 未正确初始化,或栈大小设置不足。
- 解决方法:
- 在 Arduino IDE 中开启 “PSRAM” 选项(Tools→PSRAM→OPI PSRAM);
- 将推理任务栈大小从 8192 调整为 16384,保障 PSRAM 动态分配;
- 采集后及时释放图像缓冲区,避免 PSRAM 泄漏。
3. 灯带与摄像头引脚冲突
- 问题现象:初始化灯带后,OV3660 摄像头无法采集图像,提示 “Camera capture failed”。
- 原因分析: OV3660 摄像头引脚设计错误。
- 解决方法:重新分配引脚,解决冲突问题。
4. 原报告已提及的通用问题
(灯带卡顿、重复识别、OLED 中文显示乱码等问题的解决方法与原报告一致,适配 Xiao ESP32S3 Sense 后未复现)
八、心得体会
通过本次基于 Xiao ESP32S3 Sense(OV3660 摄像头)的智能氛围灯带项目开发,我不仅适配了特定硬件的开发细节,更深入理解了边缘 AI 在小型嵌入式设备上的落地要点,总结出以下核心体会:
1. 硬件适配层面
- 专用开发板优势:Xiao ESP32S3 Sense 专为边缘 AI 设计,集成 OV3660 摄像头与 PSRAM,相比通用 ESP32 开发板,无需额外接线,采集效率与内存利用率提升显著;但需严格遵循引脚定义,避免与摄像头引脚冲突。
- 摄像头调优关键:OV3660 的参数校准(白平衡、亮度、分辨率)直接影响识别准确率,需针对具体场景(手势采集)定制参数,而非使用默认配置。
2. 技术实现层面
- 双核调度优化:ESP32S3 的 LX7 双核性能优于传统 ESP32,核心 1 处理 OV3660 采集 + 推理时,核心 0 的灯带 / OLED 控制无延迟,需合理分配任务优先级,充分利用硬件算力。
- PSRAM 利用技巧:Xiao ESP32S3 Sense 的 8MB PSRAM 是保障图像缓存与模型运行的关键,需开启 PSRAM 选项并合理分配内存,避免静态占用导致动态分配失败。
3. 项目拓展层面
- Xiao ESP32S3 Sense 支持 Wi-Fi 6 与蓝牙 5.0,后续可拓展远程控制、多设备联动功能;
- OV3660 支持更高分辨率(VGA)采集,可训练更复杂的手势模型(如数字手势控制亮度 / 速度);
- 开发板超小体积可适配更多场景(如车载氛围灯、桌面摆件),具备商业化潜力。
本次项目让我深刻认识到 “硬件特性决定软件设计” 的核心逻辑,Xiao ESP32S3 Sense 的专用化设计大幅降低了边缘 AI 开发门槛,但也对硬件适配细节提出更高要求。未来我会继续深耕专用嵌入式硬件 + 边缘 AI 的结合,实现更多小型化、智能化的设备开发。
总结
- 本项目基于 Xiao ESP32S3 Sense(OV3660 摄像头)开发,融合 Edge Impulse 手势识别与 FreeRTOS 双核调度,实现了跑马灯 / 呼吸灯 / 彩虹灯三种模式的手势控制,OLED 可视化反馈与蜂鸣器提示提升了交互体验;
- 针对 Xiao ESP32S3 Sense+OV3660 的硬件特性,完成了摄像头参数校准、PSRAM 内存分配、引脚冲突规避等核心适配,解决了图像采集模糊、内存分配失败等关键问题;
- 项目验证了 Xiao ESP32S3 Sense 在边缘 AI 场景的优势:超小体积、集成化摄像头、充足的 PSRAM,是小型智能设备开发的优质选择。


