力传感器
1. 什么是力传感器?
力传感器(force sensor) 将力的量值转换为相关电信号的器件。力是引起物质运动变化的直接原因。力传感器能检测张力、拉力、压力、重量、扭矩、内应力和应变等力学量。具体的器件有金属应变片、压力传感器等,在动力设备、工程机械、各类工作母机和工业自动化系统中,成为不可缺少的核心部件。
力传感器模型:


2. 力传感器是如何工作的?
力传感器的一般工作原理是对所施加的力作出响应,并将力值转换成可测量的量。市场上有各种基于各种传感元件的力传感器,大多数力传感器都是使用力敏电阻器设计的,这些传感器由传感膜和电极组成。力传感器通常使用一种称为应变计的装置来测量力的大小。应变计是一种能够测量物体应变(即形变)的传感器。当物体受到外力作用时,它会发生形变,应变计会感知到这种形变并将其转化为电信号。应变计是由细长且具有弹性的金属片或导线组成的。当物体受到力作用时,应变计的形状会发生微小变化,从而导致金属片或导线发生应变。这些应变会导致金属片或导线的电阻值发生变化。通过将应变计与电桥电路相连,可以测量出电阻的变化。电桥电路是一种能够测量电阻差异的电路。当应变计受到力作用时,电桥电路会检测到电阻的变化,并产生一个与力大小成正比的电信号。这个电信号可以通过放大器进行放大,并通过模数转换器转换为数字信号,以便进行数字化处理和分析。这样,我们就可以准确地测量到施加在力传感器上的力的大小。 力传感器主要由三个部分组成: 1:力敏元件(即弹性体,常见的材料有铝合金,合金钢和不锈钢)。 2:转换元件(最为常见的是电阻应变片)。 3:电路部分(一般有漆包线,pcb板等)。 常用传感器型号:
- ELAF 系列力传感器通过高温微熔玻璃将微机械加工压阻式应变片黏贴在高性能不锈钢测力弯曲片上。 这一技术彻底摆脱了传统力传感器中使用的容易老化的有机环氧树脂,从而具有极好的量程和零点稳定性。由于需要在非常低的张力下工作,因此所用应变片的应变灵敏度系数应大于 100,循环寿命基本达到无限,具有较高分辨率和极高过载能力(无需停止),可提供 0.5 到 4.5 V 的放大比例输出或 20 mV/V 的桥路输出。ELAF 传感器适合于测试和测量应用。从超紧凑 0.5” 直径的 B0 和 T1 设计到大尺寸 1.25” 直径的 B2 封装,ELAF 拥有超常的灵活性和优越的性能。
ELAF产品图:

ELAF载装单元:

ELAF连接方式:

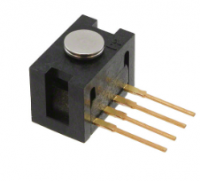
- 小型轻量力传感器XFC200R:不同于具有水平施力表面的传感器,采用球形负载按钮设计,使测量结果能够更加精确。 该产品具有高刚度性能,适用于各种尺寸和测量范围,支持动态应用中的测量。应力消除弹簧增加了输出电缆的强度。传感元件采用经过全温补偿并配备有高稳定性的微机械加工硅应变片组成的惠斯通电桥。
XFC200R产品图:

XFC200R接线方式:

- FN3002系列:力称重传感器是一种能够测量物体受到的力或重量的传感器。它通常由一个弹性元件和一个敏感元件组成。当物体施加在传感器上时,弹性元件会发生形变,导致敏感元件的电阻、电容或电感发生变化。通过测量这种变化,传感器可以将受到的力或重量转换为电信号输出。力称重传感器广泛应用于工业自动化、机械设备、医疗器械、交通运输等领域,用于测量物体的重量、压力或拉力等参数。
产品图:

3. 如何应用力传感器?
力传感器应用的三大领域: 称重传感器形式的选择主要取决于称重的类型和安装空间,保证安装合适,称重安全可靠;另一方面要考虑厂家的建议,对于传感器制造厂家来讲,它一般规定了传感器的受力情况、性能指标、安装形式、结构形式、弹性体的材质等。 譬如铝合金悬臂梁传感器适合于电子计价秤、平台秤、案秤等;钢式悬臂梁传感器适用于电子皮带秤、分选秤等;钢质桥式传感器适用于轨道衡、汽车衡等;柱式称重传感器适用于汽车衡、动态轨道衡、大吨位料斗秤等。 称重传感器主要应用在各种电子衡器、工业控制领域、在线控制、安全过载报警、材料试验机等领域。如电子汽车衡、电子台秤、电子叉车、动态轴重秤、电子吊钩秤、电子计价秤、电子钢材秤、电子轨道衡、料斗秤、配料秤、罐装秤等。 传感器在我们智能化的生活中扮演着重要的角色,其中,力传感器在力学中使用范围极广,常见应用在航天航空,汽车测试,医疗器械,自动化设备控制环境中,今天就来讲讲力传感器应用大三大领域。
1:医疗康复领域
应用对象:康复机器人
应用方式:检测握手力,指尖捏合力,监测病人的指尖捏合力,握手力康复情况。
应用传感器:普通力传感器
 2:踏板力测试系统
应用对象:汽车
应用方式:汽车踏板性能测试系统,是以测量臂空间解算为基础的汽车踏板智能化测试设备,能够实现对各型车辆的离合、油门和制动踏板进行行程及踏板力的测试。该仪器采用进口数采系统作为主控制核心, 选用进口踏板力传感器及转角传感器作为主要测试元件,通过CAN
总线接口进行数据传输,配置专业的操作软件,能实时的在上位机上进行显示并保存。
应用传感器:踏板力传感器
2:踏板力测试系统
应用对象:汽车
应用方式:汽车踏板性能测试系统,是以测量臂空间解算为基础的汽车踏板智能化测试设备,能够实现对各型车辆的离合、油门和制动踏板进行行程及踏板力的测试。该仪器采用进口数采系统作为主控制核心, 选用进口踏板力传感器及转角传感器作为主要测试元件,通过CAN
总线接口进行数据传输,配置专业的操作软件,能实时的在上位机上进行显示并保存。
应用传感器:踏板力传感器

3:机器人抓取工件重量在线测量
应用对象:机器人
应用方式:机器人传送工件时适用;可以检测工件是否缺损,或者工件类型错误,或者多重工件拾取;因为是在机器人运动过程中测量,因此不占用机器人循环时间;对于6轴传感器,保证姿态不变化的情况下,任何方向上的检测都是可行的;对于3轴传感器,保证姿态不变化的情况下,保证Z轴向与重力方向一致时可行的。
应用传感器:三维力/六维力传感器
 力传感器通常由以下几个模块组成:弹性体,变形测量元件,信号处理电路,输出接口,其分别的功能是。弹性体:弹性体是力传感器的主要组成部分,它能够感受到外部施加在传感器上的力,并且产生相应的变形。变形测量元件:变形测量元件通常是一种电阻、电容、电感或半导体等材料,它与弹性体相连,并能够随着弹性体的变形而发生电学或磁学性质的变化。信号处理电路:信号处理电路用于将变形测量元件输出的变化信号进行放大、滤波、线性化等处理,以便能够得到精确的力测量结果。输出接口:输出接口负责将信号处理电路处理后的数据输出给外部设备,常见的输出接口有模拟电压输出、数字串口输出、无线通信输出等。根据不同的使用场景,选择对应功能的力传感器,使得力传感器在各个领域都能得到很好的使用。例如,在虚拟现实游戏中,力传感器可以用于模拟物体的重量和阻力,使用户能够更加真实地感受到力的作用。这就需要将力传感器与反馈系统相连,可以实现力的反馈。当机械装置受到过大的力时,控制系统可以自动调整力的大小,以保护设备。这就需要将力传感器与控制系统相连,可以实现对力的准确控制。需要注意的是,在应用力传感器时,应根据具体的需求选择合适的传感器类型和安装方式,并确保传感器的准确性和可靠性。在安装和使用过程中,还要注意保护传感器免受过大的力、振动和环境影响。
面对如此多的力传感器类型,在不同的应用场景选取适合的传感器是非常重要的,我们可以从如下几个步骤选取合适的类型。
力传感器通常由以下几个模块组成:弹性体,变形测量元件,信号处理电路,输出接口,其分别的功能是。弹性体:弹性体是力传感器的主要组成部分,它能够感受到外部施加在传感器上的力,并且产生相应的变形。变形测量元件:变形测量元件通常是一种电阻、电容、电感或半导体等材料,它与弹性体相连,并能够随着弹性体的变形而发生电学或磁学性质的变化。信号处理电路:信号处理电路用于将变形测量元件输出的变化信号进行放大、滤波、线性化等处理,以便能够得到精确的力测量结果。输出接口:输出接口负责将信号处理电路处理后的数据输出给外部设备,常见的输出接口有模拟电压输出、数字串口输出、无线通信输出等。根据不同的使用场景,选择对应功能的力传感器,使得力传感器在各个领域都能得到很好的使用。例如,在虚拟现实游戏中,力传感器可以用于模拟物体的重量和阻力,使用户能够更加真实地感受到力的作用。这就需要将力传感器与反馈系统相连,可以实现力的反馈。当机械装置受到过大的力时,控制系统可以自动调整力的大小,以保护设备。这就需要将力传感器与控制系统相连,可以实现对力的准确控制。需要注意的是,在应用力传感器时,应根据具体的需求选择合适的传感器类型和安装方式,并确保传感器的准确性和可靠性。在安装和使用过程中,还要注意保护传感器免受过大的力、振动和环境影响。
面对如此多的力传感器类型,在不同的应用场景选取适合的传感器是非常重要的,我们可以从如下几个步骤选取合适的类型。
- 了解应用程序和您正在测量的内容。测力传感器不同于压力传感器或扭矩传感器,它们是用来测量拉力和压缩力的。
- 确定力传感器的安装特性及其组装。你需要的静态负载还是动态类型?定义安装类型意思是你要如何安装这个力传感器,是内螺纹/外螺纹、直列式、侧面安装式、法兰安装式、通孔式还是压缩垫圈。
- 确定最小和最大量程要求。在选择量程之前,一定要选择超过最大运行负载的量程,并确定所有的外部负载(侧负载或偏心负载)和力矩。
- 确定力传感器的尺寸和形状要求(宽度、重量、高度、长度等)和机械性能要求(输出、非线性、迟滞、蠕变、桥的电阻、分辨率、频率响应等)其他需要考虑的特性包括(防水、低温、高温、多桥或冗余桥、和接口。
- 确定应用程序所需的输出类型。力传感器电路以mV/V输出电压。因此,如果你的PLC或DAQ需要模拟输出、数字测压元件输出或串行通信,你肯定需要一个测压元件放大器或信号调节器。确保选择正确的放大器,并校准整个测量系统(负载传感器+信号调节器)。
4. 主要的力传感器供应商
- SparkFun Electronics是一家位于美国科罗拉多州的电子零件和工具供应商。他们提供各种各样的电子零件,包括传感器、电池、开发板、电线、电缆等。该公司主要生产的力传感器是SEN-10245系列的,适用于的工作温度0°C ~ 50°C,适用的操作力50.00kgf,所需要的电压是10v。

- Ohmite是一家美国的电子元件制造商,成立于1925年。该公司主要生产和销售电阻器和电阻器相关产品,包括可调电阻器、电位器、电流互感器和电感器等。Ohmite的产品广泛应用于各种行业和领域,包括电子、通信、汽车、医疗和工业等。该公司的力传感器主要是FSR系列的,适用的工作温度为-20~85度,属于压力感应电阻器。


- Honeywell是一家全球知名的多元化科技和制造公司。该公司总部位于美国新泽西州,业务涵盖航空、建筑、化工、电子、能源等多个领域。该公司的力传感器主要是FSG系列的,适用的工作温度为-40~85度,适合的操作力更大0~5N,属于压力感应电阻器。

5. 参考案例
from machine import Pin,ADC from utime import sleep led = Pin(0, Pin.OUT) led.value(0) button_x = ADC(0) button_y = ADC(1) sw = Pin(28,Pin.IN,pull = Pin.PULL_UP) while True: if sw.value() == 0: led.value(1) sleep(0.5) led.value(0) if button_x.read_u16() < 44000: orient_x = 'Left' elif button_x.read_u16() > 47000: orient_x = 'Right' else :orient_x = 'Middle' if button_x.read_u16() < 44000: orient_y = 'Up' elif button_x.read_u16() > 47000: orient_y = 'Down' else :orient_y = 'Middle' print("X : {:<10} Y : {:<10} ORT_X : {:<10} ORT_Y : {:<10}".format(button_x.read_u16(),button_y.read_u16(), orient_x, orient_y))


