任务介绍
本次挑选的是任务5
设计一款步进电机驱动模块,使用集成驱动IC,支持STEP/DIR标准接口控制。
基本要求:
- 使用集成步进驱动IC
- 支持双极步进电机
- STEP(脉冲)+ DIR(方向)标准控制接口
- 支持微步细分(至少1/16)
- 工作电压≥8V
- 散热设计合理
请注意:设计所用的主要器件需在DigiKey官网上有货且正常售卖
方案介绍
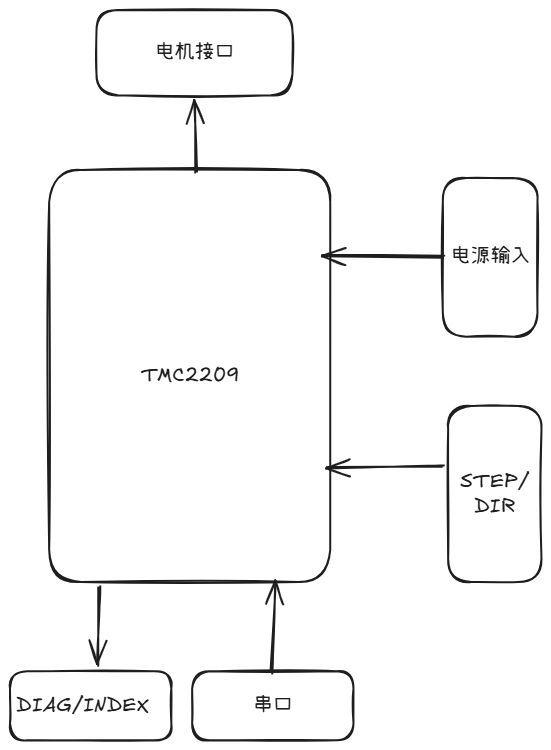
本设计采用TMC2209步进电机驱动ic,该ic支持串口与STEP/DIR标准接口控制,并且有2个输出引脚,DIAG 用来报错/堵转检测,INDEX 用来输出索引脉冲信号。本次将这些引脚全部引出,其中电机接口用HX2.54端子便于拔插,并增加一颗led灯用于显示驱动板的工作状态。
模块介绍
TMC2209是一款用于两相步进电机的超静音电机驱动IC。TRINAMIC先进的StealthChop2斩波器可确保无噪音运行、最高效率和最佳电机扭矩。其快速电流调节功能,以及与SpreadCycle的可选组合,可在添加无传感器回零功能的StallGuard时实现高动态运动。集成的功率MOSFET可处理高达2A RMS的电机电流,并具备保护和诊断功能,以实现稳定可靠的运行。简单易用的UART接口提供了调优和控制选项。可将应用调优参数存储到OTP存储器中
芯片特性
- 适用于线圈电流高达2.8A(峰值)、2A RMS的两相步进电机
- 具备8、16、32或64微步引脚设置的STEP/DIR接口
- 通过MicroPlyer插值实现256微步的平稳运行
- StealthChop2静音电机运行
- SpreadCycle高动态电机控制斩波器
- 用于StealthChop的StallGuard4负载和失速检测
- CoolStep电流控制,节能高达75%
- 低RDSon,低发热,LS 170mΩ和HS 170mΩ(典型值,25°C时)
- 电压范围4.75…29V DC
- 低功耗待机模式,符合待机能耗规定
- 可选内部检测电阻(无需外部检测电阻)
- 被动制动、续流和自动掉电功能
- 单总线UART和OTP,提供高级配置选项
- 集成脉冲发生器,可实现独立运动控制
- 全面的保护和诊断功能
- 带大散热片的紧凑型QFN封装
TMC2209DigiKey链接:TMC2209-LA-T Analog Devices Inc./Maxim Integrated | 电机驱动器,控制器 | DigiKey
原理图和PCB模块介绍
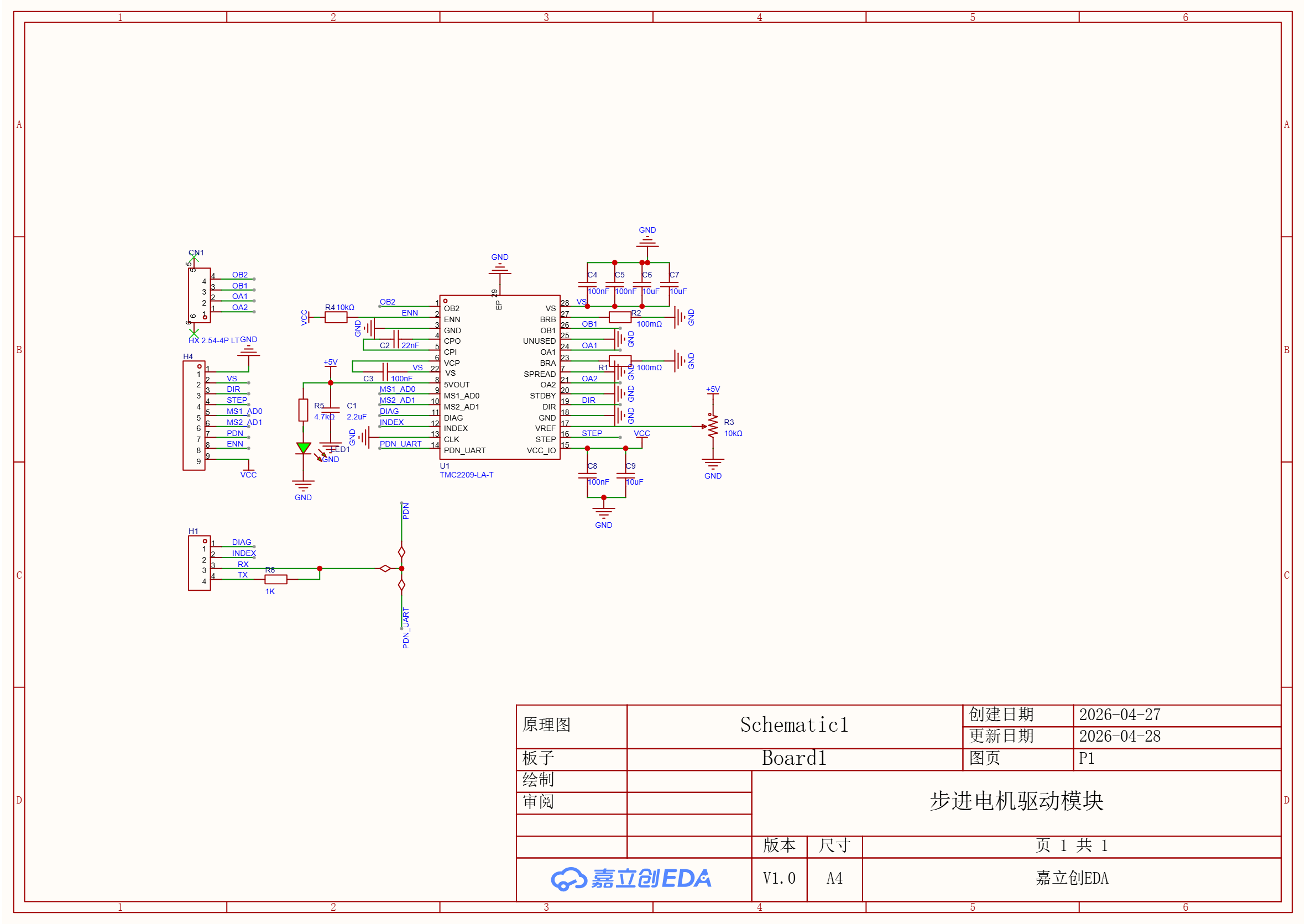
原理图
PCB
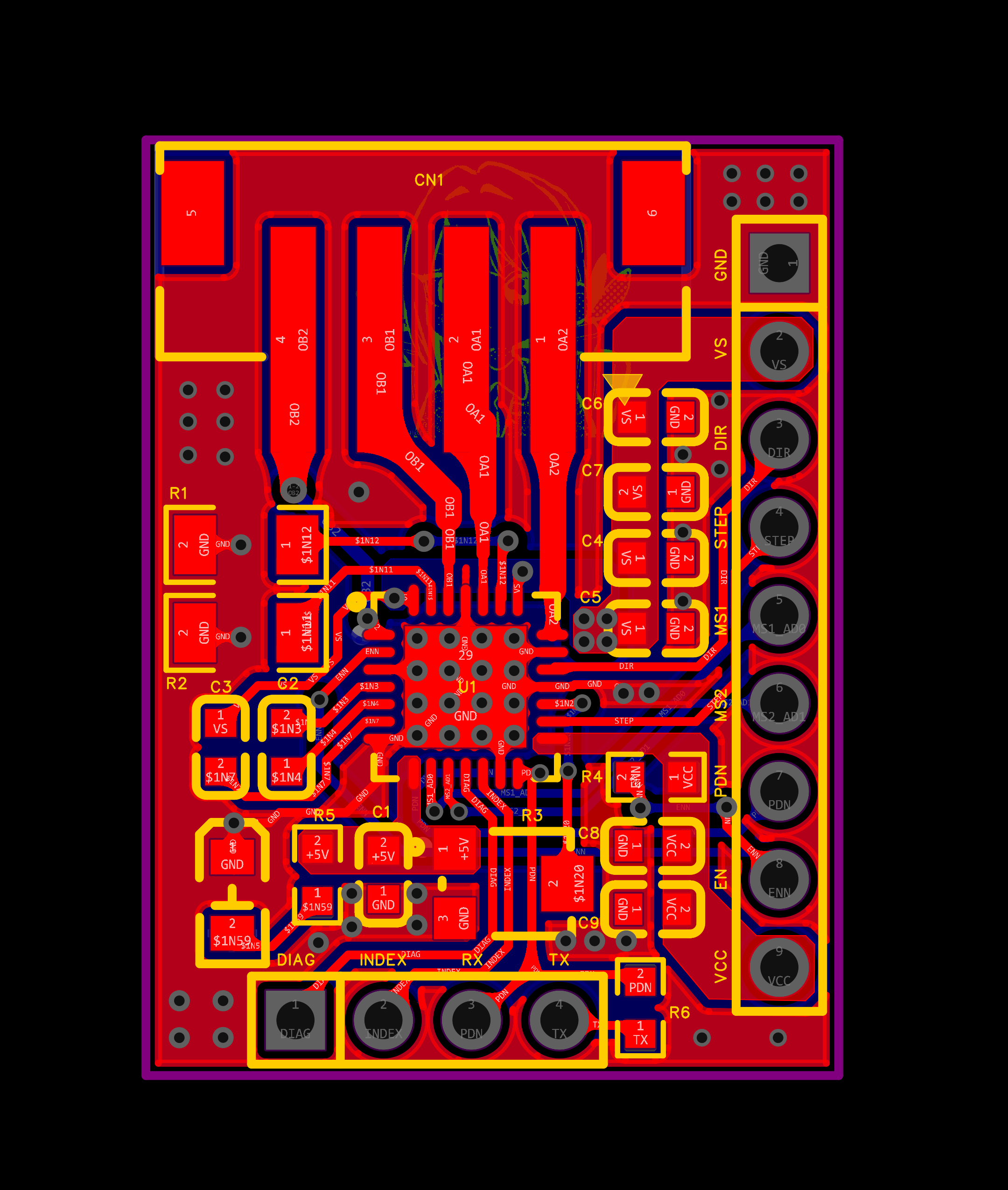
TMC2209 采用 QFN28 裸露焊盘封装,底部 EP 焊盘接 GND,并通过 PCB 大面积 GND 铺铜和热过孔阵列进行散热。VS 电源端布置近端去耦和储能电容,采样电阻靠近芯片放置,减小功率回路面积。根据实际电机电流限制驱动电流,保证芯片温升处于安全范围。如果后续需要可以在芯片上面加上散热片辅助散热;其中,电源输入部分均采用铜皮填充,增大线宽等方式来确保能过大电流。串口通信方面,该模块采用单总线串口的方式,加上MS1/MS2来控制设备地址,模块上选择直接将PDN口引出为tx和rx,方便后续接线。
引脚说明
引脚名 | 作用 |
|---|---|
OA1 | 步进电机 A 相输出 1 |
OA2 | 步进电机 A 相输出 2 |
OB1 | 步进电机 B 相输出 1 |
OB2 | 步进电机 B 相输出 2 |
VS | 电机驱动电源输入,给电机功率级供电,工作电压应 ≥8V |
VCC / VCC_IO | 数字 IO 电源输入,用于 STEP、DIR、ENN、UART 等逻辑信号电平供电 |
GND | 电源地,驱动器、电机电源和主控需要共地 |
STEP | 步进脉冲输入,每个脉冲控制电机转动一个步距或微步 |
DIR | 方向控制输入,用于控制电机正转或反转 |
ENN | 使能输入,低电平使能驱动,高电平关闭电机输出 |
MS1_AD0 | 微步细分配置引脚,也可作为 UART 地址位 AD0 |
MS2_AD1 | 微步细分配置引脚,也可作为 UART 地址位 AD1 |
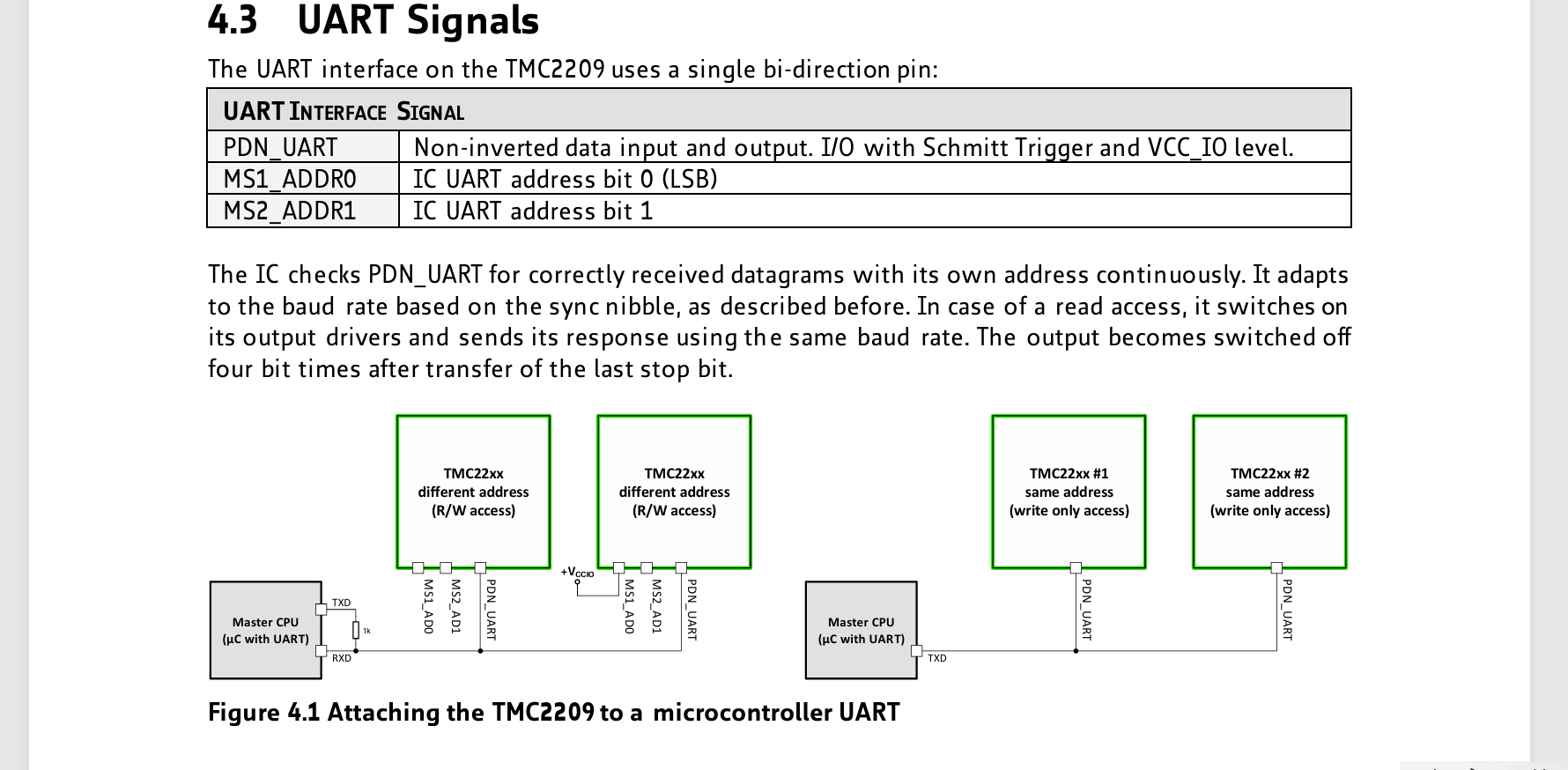
PDN_UART / PDN | 单线 UART 通信接口,也可用于掉电控制 |
RX | UART 接收信号,与 PDN_UART 相连,用于接收驱动器返回数据 |
TX | UART 发送信号,通过电阻接入 PDN_UART,用于向驱动器发送配置数据 |
DIAG | 诊断输出,引脚出现高电平时表示堵转检测或驱动错误 |
INDEX | 索引脉冲输出,用于输出可配置的 index 脉冲信号 |
VREF | 电流参考电压输入,接到可变电阻器上,用于调节参考电压,从而设定步进电机驱动电流 |
心得体会
通过本次设计,我进一步理解了步进电机驱动模块的接口、电源、细分控制和散热设计要点。TMC2209集成度高,功能完善,但实际应用中仍需重视PCB布局、走线和热管理。



