一、项目介绍
本项目设计并实现了一款基于ESP32-C3系列芯片及ESP-NOW无线协议的坦克模型遥控控制板。控制板以ESP32-C3-MINI-1U模块为核心,同时兼容XIAO ESP32C3与ESP32C3 SuperMini开发板,具备高度集成、灵活切换主控的特性。板载多路大/中/小功率直流电机驱动、基于FM8118的超声波雾化驱动、音频驱动及数字输入接口,可驱动坦克完成移动、炮塔旋转、俯仰、开火、灯光、喷烟、音效播放等功能。无线控制采用乐鑫ESP-NOW协议(无Wi-Fi连接、低延迟、抗干扰强),基于PlatformIO平台开发,整体系统响应迅速、功耗低、扩展性好,适用于RC坦克模型、机器人竞赛及创客教育领域。
1.1 硬件介绍
控制板硬件围绕ESP32-C3核心构建,主要包含以下功能模块:
- 主控单元:板载ESP32-C3-MINI-1U模组(RISC-V架构,Wi-Fi/BLE),并额外提供排针接口,可灵活替换为XIAO ESP32C3或ESP32C3 SuperMini开发板,方便开发与调试。
- 动力驱动:2路独立的大电流H桥电路,峰值电流13A/路,用于控制坦克左右履带电机,实现前进、后退、差速转向。
- 炮塔驱动:1路4.2A双向直流电机驱动,用于炮塔360度连续转动。
- 辅助执行器驱动:3路2.3A单向有刷电机驱动,分别控制:
- 坦克大灯(开关控制)
- 开火电机(模拟后坐力或抛壳)
- 炮塔俯仰电机(炮管上下调节)
- 特效驱动:
- 超声波雾化驱动电路,用于驱动尾部雾化片产生“喷烟”效果。
- 音频驱动电路,驱动2~5W扬声器,可播放发动机轰鸣、开火音效等。
- 传感器输入:1路数字/模拟输入接口,用于获取炮塔子弹填充状态(如光电传感器或微动开关)。
- 电源管理:支持7.4V~12V输入(2S或3S锂电池),板载5V/3.3V稳压,为逻辑电路及ESP32-C3供电。
1.2 功能概览
功能类别 | 具体功能 | 对应硬件 |
|---|---|---|
运动控制 | 前进、后退、左右差速转向 | 2路13A电机驱动 |
炮塔控制 | 连续旋转(左/右) | 1路4.2A电机驱动 |
武器系统 | 开火动作(后坐力/抛壳) | 1路2.3A单向电机 |
灯光系统 | 大灯亮/灭 | 1路2.3A单向电机(或LED) |
俯仰控制 | 炮管上下调节 | 1路2.3A单向电机 |
特效 | 尾部喷烟 | 超声波雾化片驱动 |
音效 | 发动机/开火等声音 | 音频驱动+扬声器 |
状态反馈 | 子弹装填状态检测 | 数字输入接口 |
1.3 设计思路
- 模块化与兼容性:主控采用可插拔设计,支持三种常见ESP32-C3板型,便于用户根据成本、尺寸、性能需求选择。
- 功率分级:将电机驱动按功率需求分为大电流(履带)、中电流(炮塔)、小电流(辅助电机),优化电源分配与PCB散热布局。
- 无线遥控:采用ESP-NOW(乐鑫私有协议),无需连接路由器,实现点对点或多对一低延迟(<10ms)通信,远优于传统蓝牙或Wi-Fi UDP。遥控器端可使用另一ESP32模块或ESP8266作为发射端,通过摇杆、按键采集指令。
- 实时性与任务管理:软件上采用Arduino分时控制,将运动控制、音效播放、状态检测分解为独立任务,确保同时执行的流畅性。
- 可扩展接口:预留I2C、ADC、GPIO接口,便于后续增加测距模块、陀螺仪、图传等。
二、功能实现
硬件框图
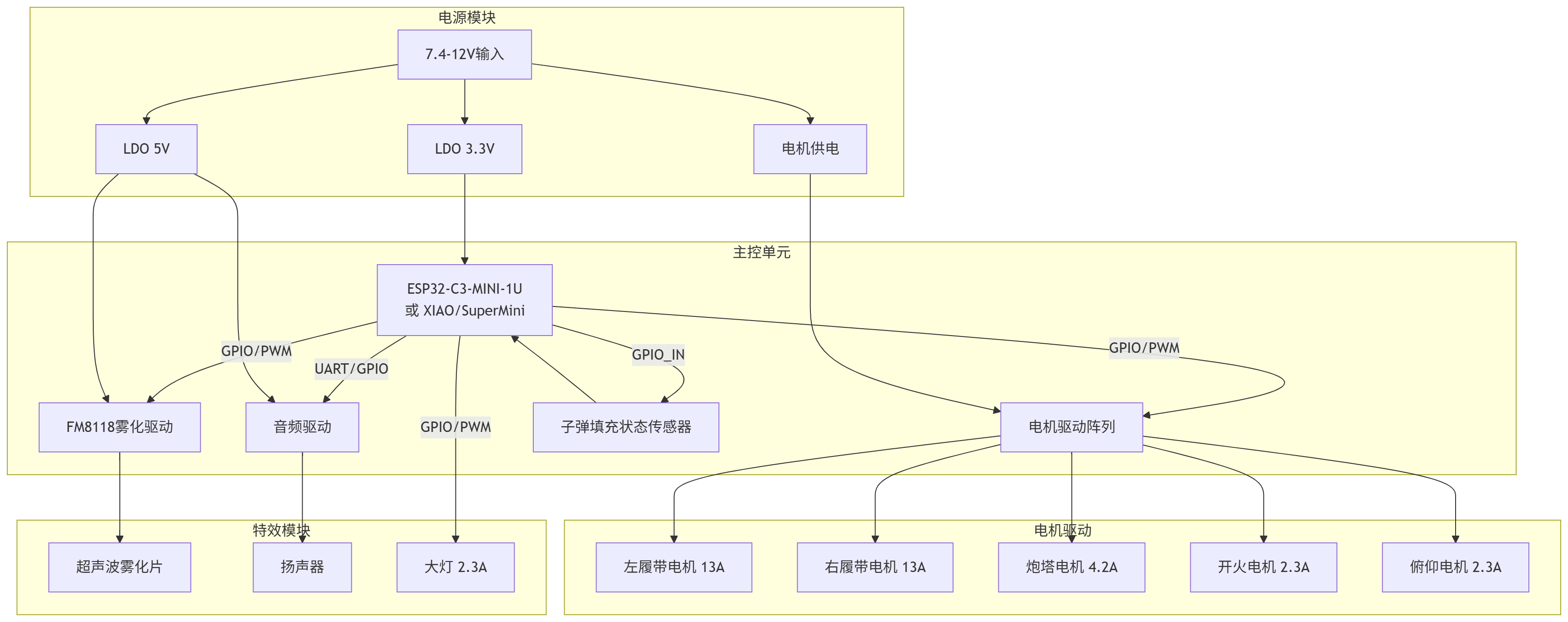
关键电路设计要点
- 履带电机驱动(13A双向):采用RZ7886,内部集成H桥,支持PWM调速及方向控制。电源引脚并联1000μF电解电容及0.1μF陶瓷电容,吸收反向电动势。
- 炮塔电机驱动(4.2A双向):使用RZ7889,内部集成H桥,PWM占空比调节转速。
- 辅助电机驱动(2.3A单向):使用N沟道MOSFET(如SI2302)加续流二极管,由MCU GPIO直接驱动栅极。大灯控制可直接用MOSFET开关,开火电机和俯仰电机则通过PWM控制速度及方向(仅单向,即通过单路MOSFET实现单向正转)。
- 雾化驱动:FM8118典型应用电路:输入5V供电,EN使能引脚接MCU GPIO,PWM输出引脚通过电感电容匹配网络连接雾化片。MCU通过控制EN引脚开启/关闭雾化,也可通过PWM输入调节功率(FM8118支持外接PWM调频)。
- 音频驱动:采用BY8001模块,通过串口(TX/RX)与ESP32-C3通信,模块直接驱动3W扬声器。电源为5V独立供电,避免与电机电源耦合。
- 子弹填充状态输入:使用轻触开关,通过10kΩ上拉电阻连接至GPIO,配置为输入模式。
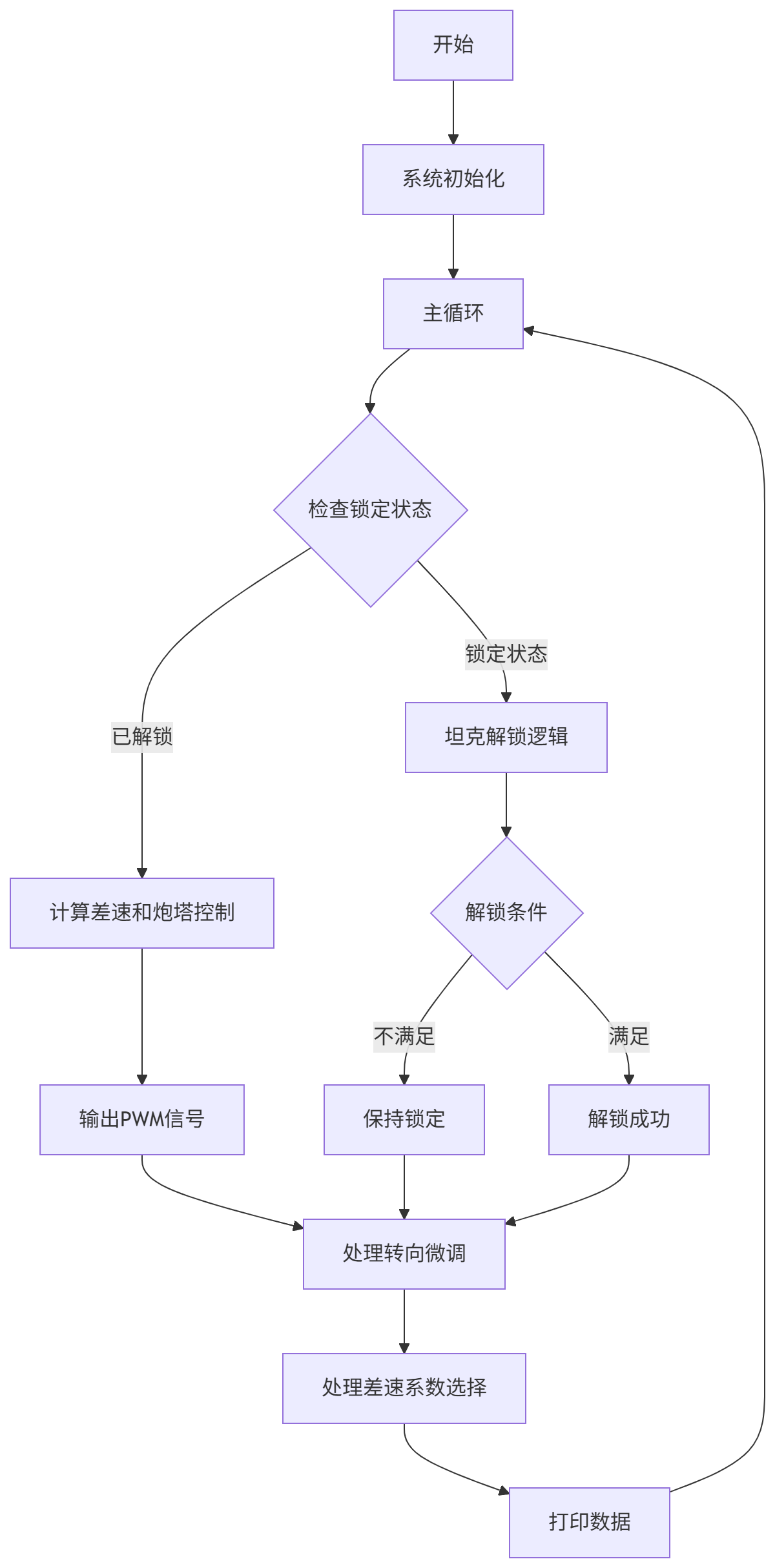
软件流程图
注:实际实现中,各动作控制任务可并行运行,流程图为主控循环逻辑简化示意。
2.2 实现过程
开发环境:
- 平台:PlatformIO(VS Code扩展)
- 板型:Espressif ESP32-C3-DevKitM-1(针对ESP32-C3-MINI-1U),同时适配XIAO ESP32C3(通过修改platformio.ini中的board字段)
- 框架:Arduino
- 核心库:ESP-NOW原生库、ESP32 PWM库(ledc)。
关键代码实现:
ESP-NOW通信协议:定义控制数据包结构体(与发射端约定一致):
struct Data_Package {
uint8_t leftJoystickX; // 左摇杆 X
uint8_t leftJoystickY; // 左摇杆 Y
uint8_t rightJoystickX; // 右摇杆 X
uint8_t rightJoystickY; // 右摇杆 Y
uint8_t leftJoystickBtn:1; // 左摇杆按键
uint8_t rightJoystickBtn:1; // 右摇杆按键
uint8_t leftSwitch1:1; // 左按键开关1
uint8_t leftSwitch2:1; // 左按键开关2 和 左按键开关1 反相
uint8_t rightSwitch1:1; // 右按键开关1
uint8_t rightSwitch2:1; // 右按键开关2 和 右按键开关1 反相
uint8_t leftPotentiometer; // 左电位器
uint8_t rightPotentiometer; // 右电位器
};
初始化ESP-NOW:
WiFi.mode(WIFI_STA);
Serial.print("STA MAC: "); Serial.println(WiFi.macAddress());
// 初始化 ESP-NOW
InitESPNow();
// 设置接收数据回调函数
esp_now_register_recv_cb(OnDataRecv);
履带差速控制:从value字段解析线性速度(高8位)和角速度(低8位):
// 转向最大档位
maxRudder = 0 < data.leftPotentiometer ? data.leftPotentiometer : 255;
// 油门位置
throttlePosition = map(data.rightJoystickY, 0, 255, 0, maxThrottle);
// 转向档位
rudderPosition = map(data.rightJoystickX, 0, 255, 0, maxRudder);
// 归一化处理
throttle = (throttlePosition - maxThrottle / 2) / 127.0;
rudder = (rudderPosition - maxRudder / 2) / 127.0;
// 转向增加转向微调值
rudder = rudder + config.rudderFineTuningValue;
// 计算差速
baseSpeed = throttle;
leftSpeed = baseSpeed * (1 + config.k * rudder);
rightSpeed = baseSpeed * (1 - config.k * rudder);
// 限幅输出
leftSpeed = constrain(leftSpeed, -1, 1);
rightSpeed = constrain(rightSpeed, -1, 1);
// 转换为PWM信号
leftSpeedPwm = leftSpeed * ((1 << PWM_RESOLUTION_BITS) - 1);
rightSpeedPwm = rightSpeed * ((1 << PWM_RESOLUTION_BITS) - 1);
// 输出占比
if(tankStartPwm < leftSpeedPwm && tankStartPwm < rightSpeedPwm) {
ledcWrite(0, leftSpeedPwm);
ledcWrite(2, rightSpeedPwm);
ledcWrite(1, 0);
ledcWrite(3, 0);
} else if(0-tankStartPwm > leftSpeedPwm && 0-tankStartPwm > rightSpeedPwm) {
ledcWrite(0, 0);
ledcWrite(2, 0);
ledcWrite(1, abs(leftSpeedPwm));
ledcWrite(3, abs(rightSpeedPwm));
} else {
ledcWrite(0, 0);
ledcWrite(1, 0);
ledcWrite(2, 0);
ledcWrite(3, 0);
}
使用ledcWrite分别设置左右电机PWM,方向由符号决定。
测试与调试:
使用两台ESP32-C3开发板(一发一收),通过串口打印调试信息验证ESP-NOW通信质量(丢包率、延迟)。
逻辑分析仪抓取电机驱动PWM波形,确认死区时间及方向切换安全。
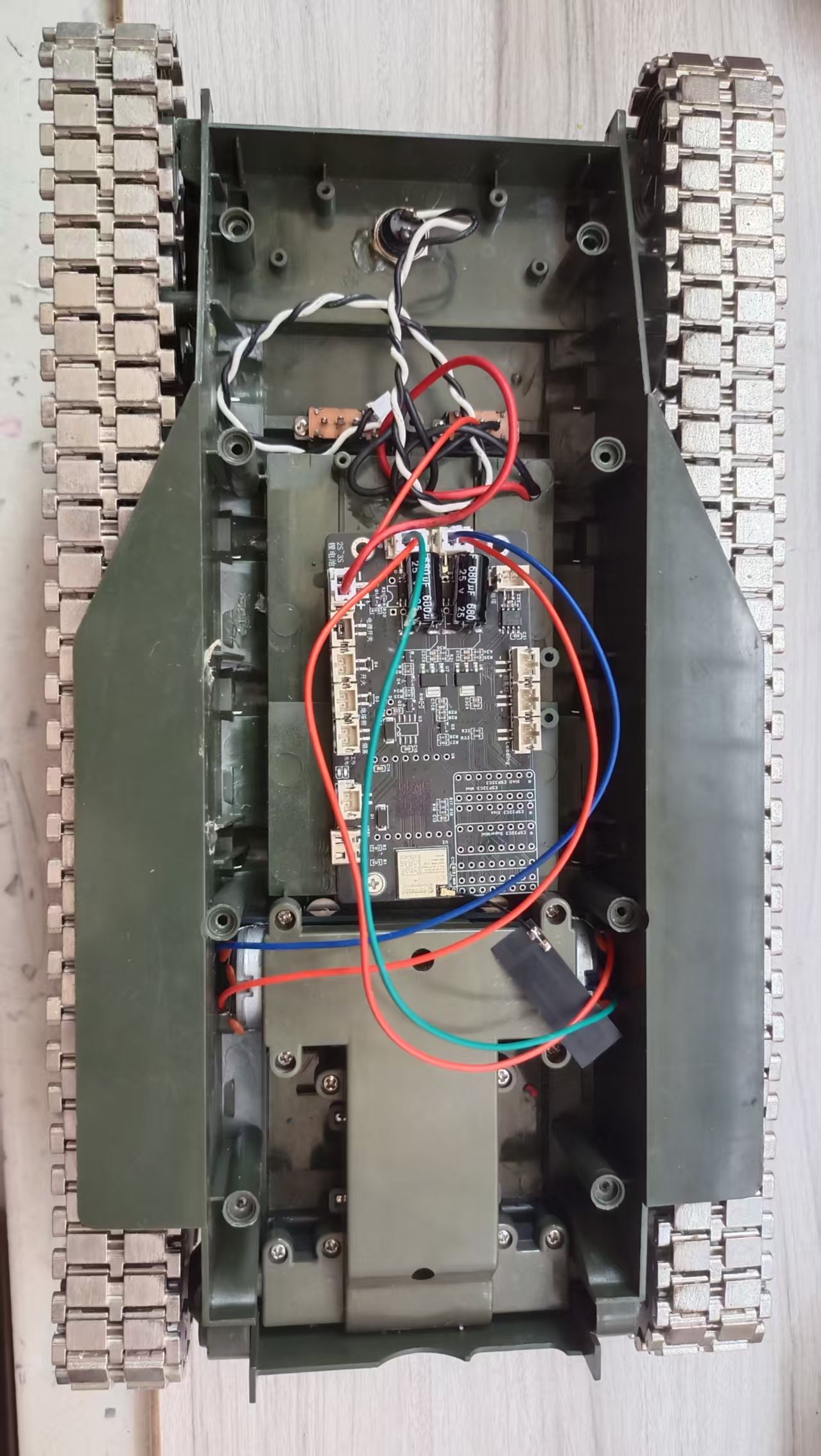
实际组装至1/16比例坦克模型,进行连续运转测试,检查驱动芯片温升及电池续航。
三、功能展示
硬件展示
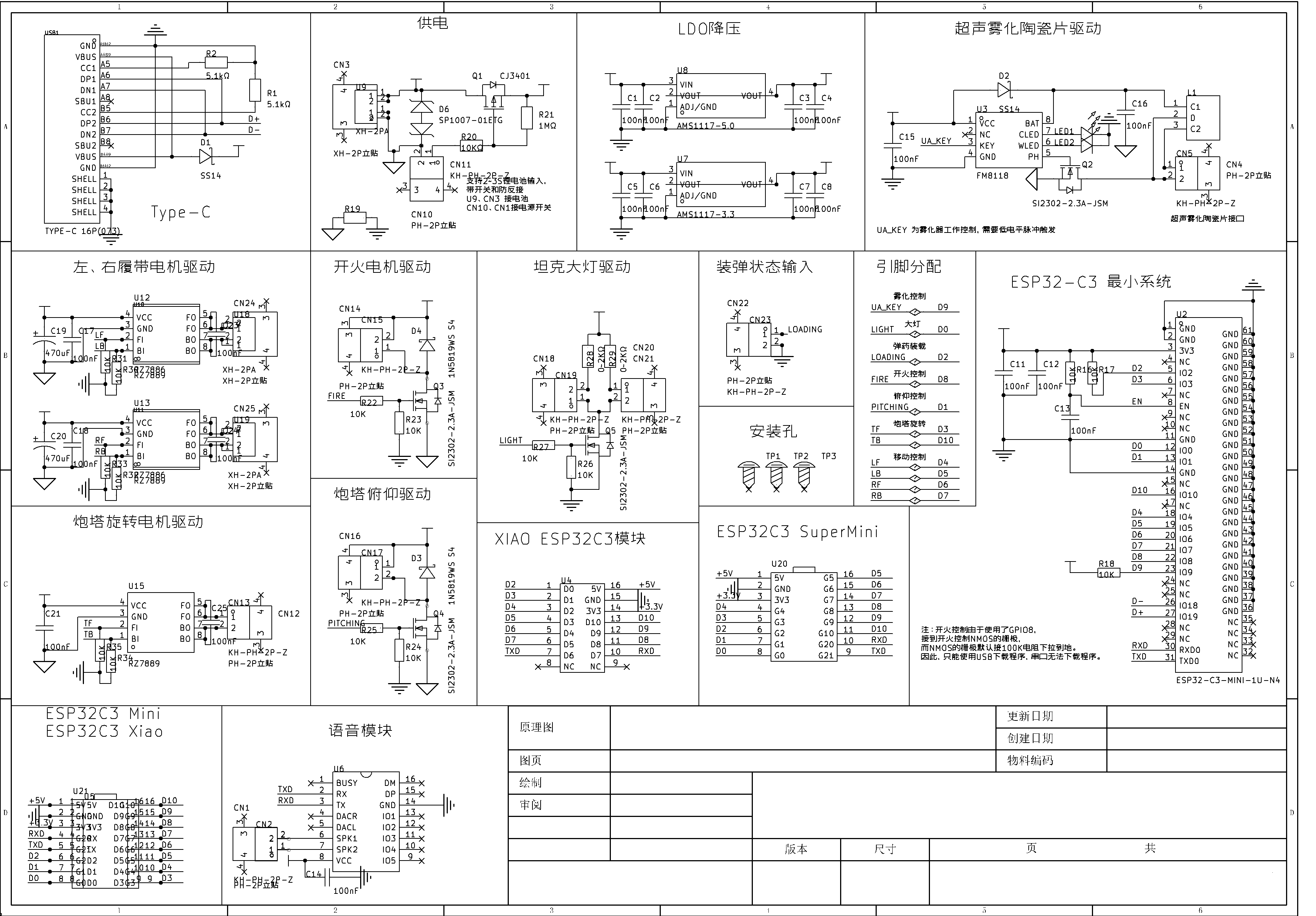
原理图
PCB 3D预览
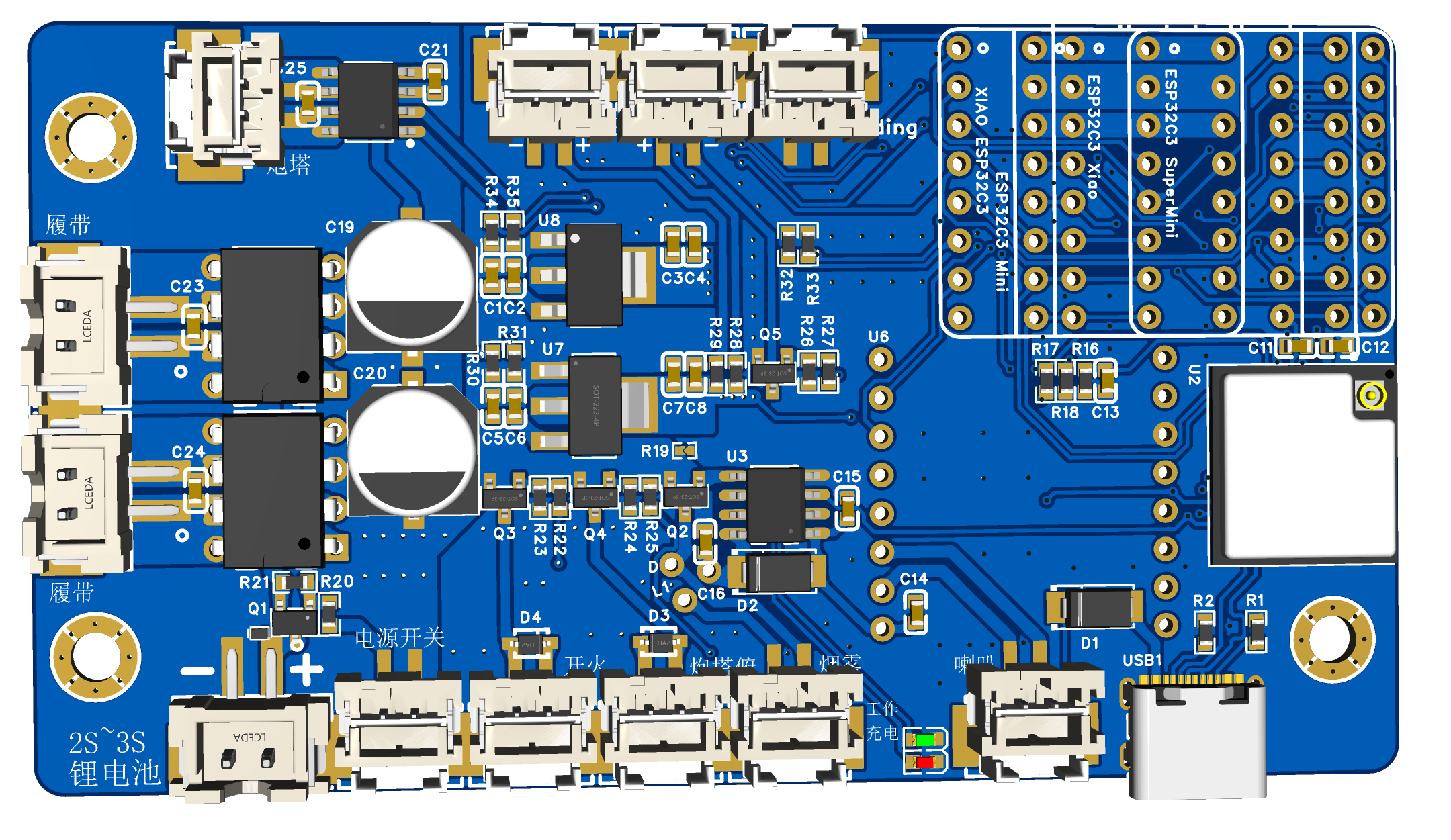
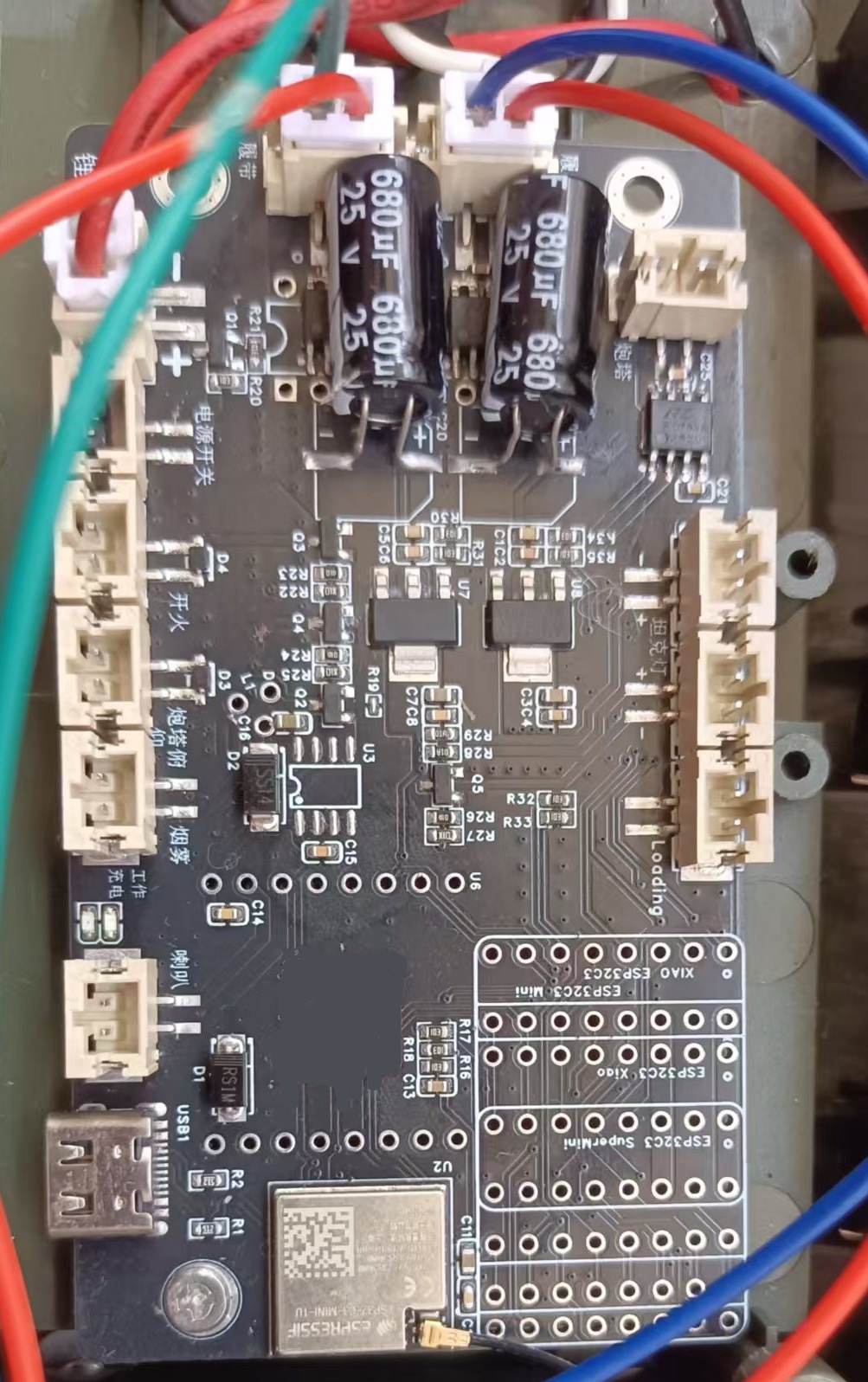
PCB实物
试玩
遥控器操作(发射端) | 坦克响应(接收端控制板) |
|---|---|
右摇杆前推 | 坦克前进,左右履带同速正转 |
右摇杆左推 | 坦克左转(左履带减速/反转,右履带加速) |
左摇杆左右拨动 | 炮塔连续顺时针/逆时针旋转 |
左摇杆前推 | 炮管上升/下降(单向电机,仅正转) |
按键B短按 | 开火电机瞬间正转 |
实际演示视频/图片:坦克在室内地面灵活走位,炮塔独立转动同时炮管俯仰。
四、总结
遇到的问题
- 安装孔位没对准,原本只是打算想改装一下我儿子的坦克模型,但忘记考虑安装孔和方向了,导致最终只有一个螺丝孔能拧上,好在是在内部且受力不大。
- 设计之初为了兼容更多的小开发板模块,做了很多的冗余设计,后面看来其实大可不必。
心得体会
本项目基于ESP32-C3与ESP-NOW协议成功设计了一套完整的遥控坦克控制板,本控制板在功能完整性、驱动性能、无线可靠性及易用性上均达到设计目标,可广泛应用于RC坦克模型、机器人底盘控制、STEM教育套件等领域。
最后,感谢硬禾学堂联合 DigiKey 推出的这次活动!此次活动带给我许多宝贵实践经验和机会,我们下期活动再见!
五、参考资料

