任务介绍
题目要求:设计一款IMU模块
- 设计一款IMU模块,可实现至少三轴的数据检测,例如加速度计、陀螺仪、磁力计等
- 板卡尺寸:小于60mmx40mm
- 包含信号:信号输出口,+3.3V、GND
- 主要器件:需在DigiKey官网上有货且正常售卖
本次使用的芯片ICM-20948:ICM-20948 TDK InvenSense | 传感器,变送器 | DigiKey
其中可以实现
- 产品定位:ICM-20948是TDK(原InvenSense)推出的9轴运动跟踪传感器,号称“全球功耗最低的9轴设备”(仅 2.5 mW),专为低功耗场景设计
集成功能:
3轴加速度计:测量线性加速度(量程±2g至±16g)
3轴陀螺仪:检测角速度(量程±250dps至±2000dps)
3轴磁力计(旭化成AK09916):感知地磁场(量程±4900µT)
数字运动处理器(DMP):独立处理运动算法,卸载主控算力
原理图和PCB模块介绍
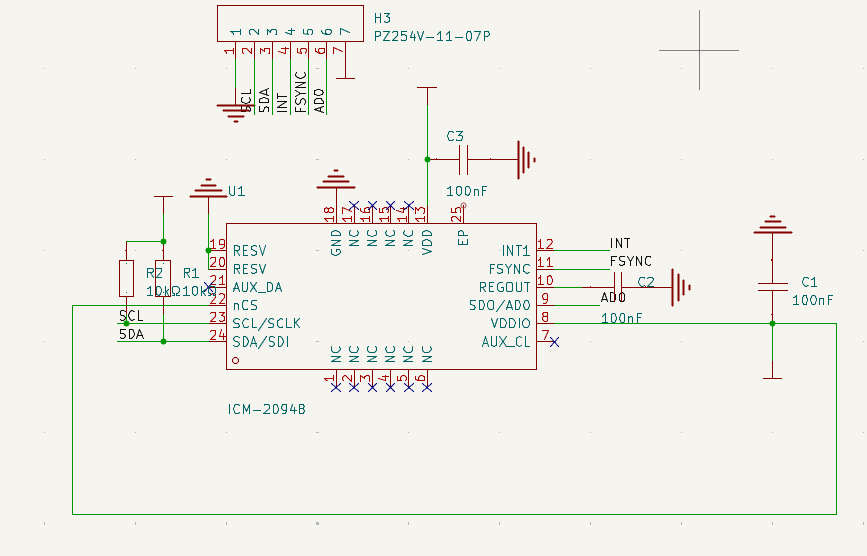
原理图
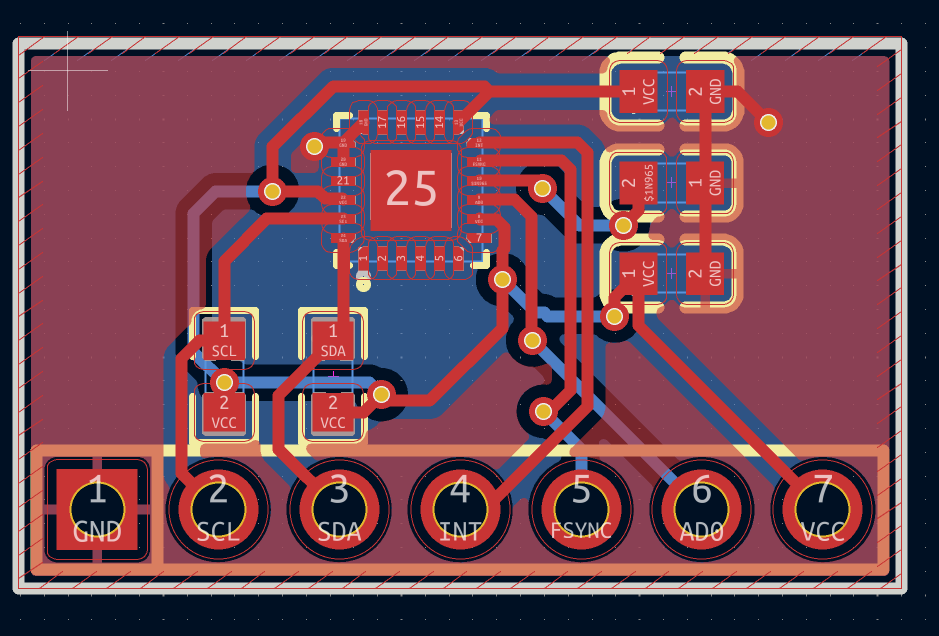
PCB图
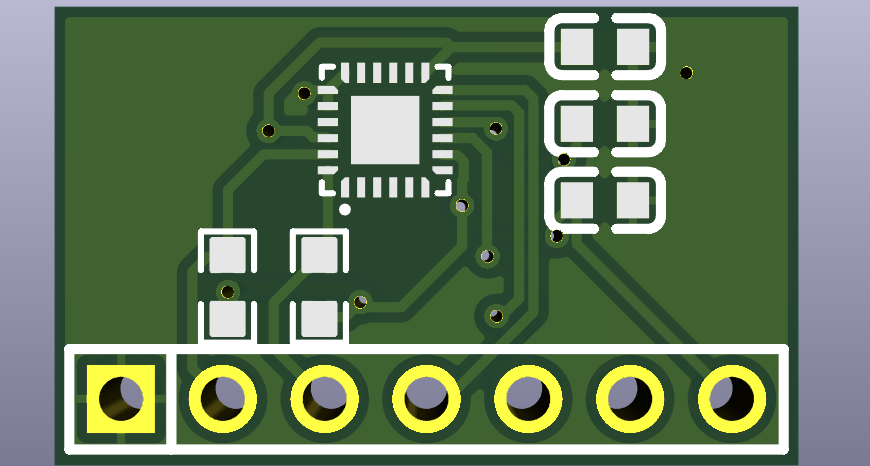
3D效果图
模块主要性能指标和管脚定义
一、主要性能指标
指标类型 | 参数项 | 规格/范围 | 说明 |
|---|---|---|---|
陀螺仪 | 量程 | ±250/±500/±1000/±2000 dps | 可编程满量程范围,16位ADC输出 |
带宽 | 用户可配置低通滤波器 | 支持动态调节 | |
加速度计 | 量程 | ±2g/±4g/±8g/±16g | 可编程满量程范围,16位ADC输出 |
唤醒中断 | 支持 | 低功耗模式下运动唤醒 | |
磁力计 | 型号 | AK09916(旭化成) | 三轴霍尔效应传感器 |
量程 | ±4900 µT | 宽动态范围,16位分辨率 | |
DMP特性 | 功能 | 运动算法卸载、背景校准 | 降低主控功耗,简化软件架构 |
功耗 | 工作功耗 | 2.5 mW(1.8V供电时约1.4mA) | 全球最低功耗9轴设备 |
接口 | I²C速率 | 100 kHz(标准)/400 kHz(快速) | 支持辅助I²C连接外部传感器 |
SPI速率 | 7 MHz | 高速通信 | |
存储 | FIFO容量 | 512字节 | 缓存传感器数据(实际容量随DMP配置变化) |
环境适应性 | 工作电压 | VDD: 1.71–3.6V, VDDIO: 1.71–1.95V | 双电源设计 |
抗冲击能力 | 20000g | 晶圆级密封封装保障可靠性 | |
温度传感器 | 数字输出 | 辅助校准温度漂移 | |
封装 | 尺寸 | 3×3×1 mm (24-pin QFN) | 超小体积 |
二、管脚定义
管脚号 | 管脚名 | 类型 | 功能描述 |
|---|---|---|---|
电源组 | |||
1, 14 | VDD | 电源 | 核心供电(1.71–3.6V) |
9 | VDDIO | 电源 | I/O电平供电(1.71–1.95V,典型1.8V) |
5, 13, 24 | GND | 地 | 接地 |
通信接口组 | |||
20 | SDA/SDI | I/O | I²C数据线 / SPI数据输入(需上拉电阻) |
19 | SCL/SCLK | 输入 | I²C时钟线 / SPI时钟输入(需上拉电阻) |
18 | AD0/SDO | I/O | I²C地址选择(低=0x68, 高=0x69) / SPI数据输出 |
17 | nCS | 输入 | SPI片选信号(低电平有效) |
中断与辅助 | |||
12 | FSYNC/INT | I/O | 帧同步输入或中断输出(可配置为运动唤醒) |
21 | AUX_DA | I/O | 辅助I²C数据线(连接外部传感器) |
22 | AUX_CL | 输出 | 辅助I²C时钟线 |
专用功能 | |||
15 | RESV | - | 保留引脚(需悬空) |
2-4, 6-8 | RESV | - | 保留引脚(内部未连接) |
传感器接口 | |||
10, 11 | NC | - | 空引脚(不连接) |
物料添加展示图
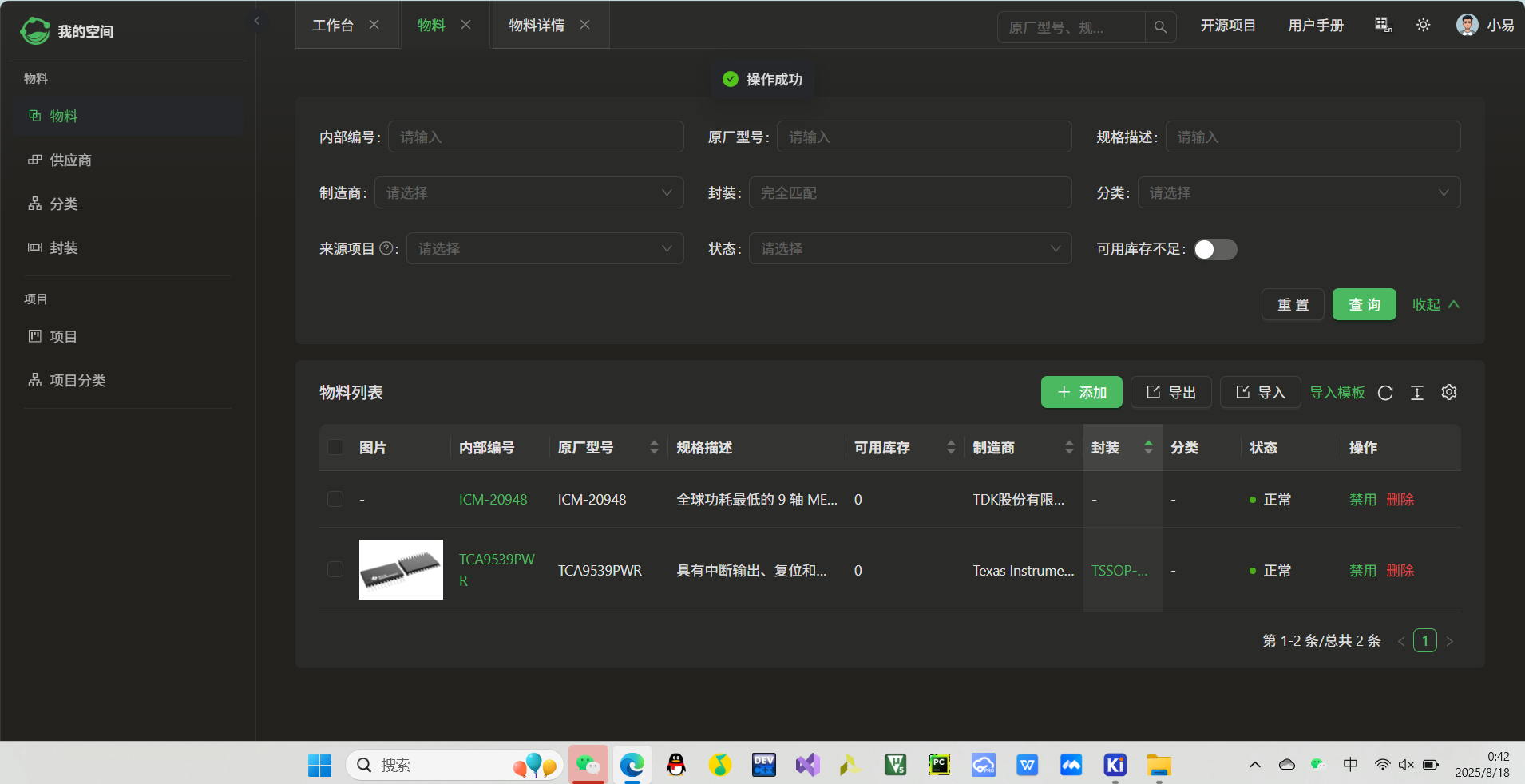
物料图

项目图
总结
感谢电子森林

 南小冰冰冰
南小冰冰冰