
KiCad文件
全屏
内容介绍
内容介绍
一、任务简介
设计一款步进电机驱动模块:
- 设计一款步进电机驱动模块,可驱动常见的步进电机,可提供至少2A电流
- 板卡尺寸:小于60mmx40mm
- 包含信号:信号输出口,电源接口、GND
- 主要器件:需在DigiKey官网上有货且正常售卖
二、模块介绍
- 芯片选择:
- 为了满足驱动2A电流的要求,并综合考虑成本和性能,选择DRV8825作为步进电机驱动芯片。DRV8825支持8.2V到45V的供电范围,最大输出电流为2.5A,且支持高达1/32的细分精度,能够驱动大多数常见步进电机,适用于多种工业和精密控制场景。相比A4988和TMC2209,DRV8825提供了较为平衡的成本和性能,能够提供更好的电流稳定性与细分精度。
- DRV8825PWPR芯片DigiKey链接:DRV8825PWPR Texas Instruments | 集成电路(IC) | DigiKey
- 功能说明:
- 该模块基于DRV8825PWPR芯片设计,依据官方手册完成电路设计。
- 与市面上的现有步进电机驱动模块相比,设计优化了信号输出接口,将步进电机的A1、A2、B1、B2引脚通过XH2.54-4P接口单独输出,方便用户进行更直接的连接与控制。
- 输入引脚被放置在不同的排针位置,以便与步进电机线进行简便连接。
- 细分控制(M0, M1, M2引脚)巧妙通过细导线(4mil宽)连接至GND,即默认为1/32细分,可使用小刀割断对应导线即可更改细分。
- 应用领域:
- 所设计的模块可广泛应用于需要精准电机控制的设备中,如3D打印机、贴片机、机器人等。其高精度的细分控制和稳定的电流输出,使其特别适合高精度的运动控制应用。
三、原理图和PCB设计

原理图

PCB正面

PCB正面(3D仿真图)

PCB背面(3D仿真图)
- 原理图规范:原理图与电路连接按照官方手册进行,保证电源、信号输入输出稳定可靠。
- PCB布局:PCB设计时采用双面板布局,以有效利用板面空间并确保信号和电源走线的合理布局。
- 大电流设计:针对大电流,加宽电源和电机走线,添加多个过孔。
- 标识规范:添加引脚标识、添加电流计算公式、添加Vref测量点,方便用户使用。
四、性能指标和管脚定义
- 性能指标:
- 输入电压范围: 8.2V至45V;
- 最大电流输出: 2.5A;
- 最大细分: 1/32(提供精确的步进电机控制);
- 散热片【推荐】:推荐在DRV8825上贴一个散热片,提高大电流运行的稳定性。
- 管脚定义:
引脚名称 | 功能说明 |
|---|---|
A1, A2 | 步进电机第一相的输出引脚,用于驱动步进电机的第一相,控制电机的旋转。 |
B1, B2 | 步进电机第二相的输出引脚,用于驱动步进电机的第二相,控制电机的旋转。 |
VIN | 电源输入引脚,连接外部电源,提供步进电机驱动芯片所需的电压(8.2V-45V)。 |
GND | 地线引脚,电源电流的回流路径,确保电路正常工作。 |
STP (STEP) | 步进脉冲输入引脚,通过脉冲信号控制步进电机的步进,每接收到一个脉冲,电机向前移动一步。 |
NENBLE | 使能引脚,拉低该引脚使能。 |
DIR | 方向控制引脚,用于控制步进电机的旋转方向。 |
NSLEEP | 睡眠引脚,用于控制DRV8825芯片的休眠状态。拉低时芯片进入低功耗模式,拉高时恢复正常工作状态。 |
NRST | 复位引脚,用于重置DRV8825芯片,拉低时恢复初始状态。 |
Vref(PCB正面标识) | 参考电压测量点,用于设置电流限制。通过调整Vref的电压,可以精确控制步进电机的最大电流输出。 |
M0, M1, M2(R1, R2, R3电阻不焊接,底下有细导线连接) | 细分设置引脚,通过不同的电平组合选择步进电机的细分模式。默认1/32细分,用户可根据需要调整,切断排线后可更改。 |
五、物料及说明(eZ-PLM)
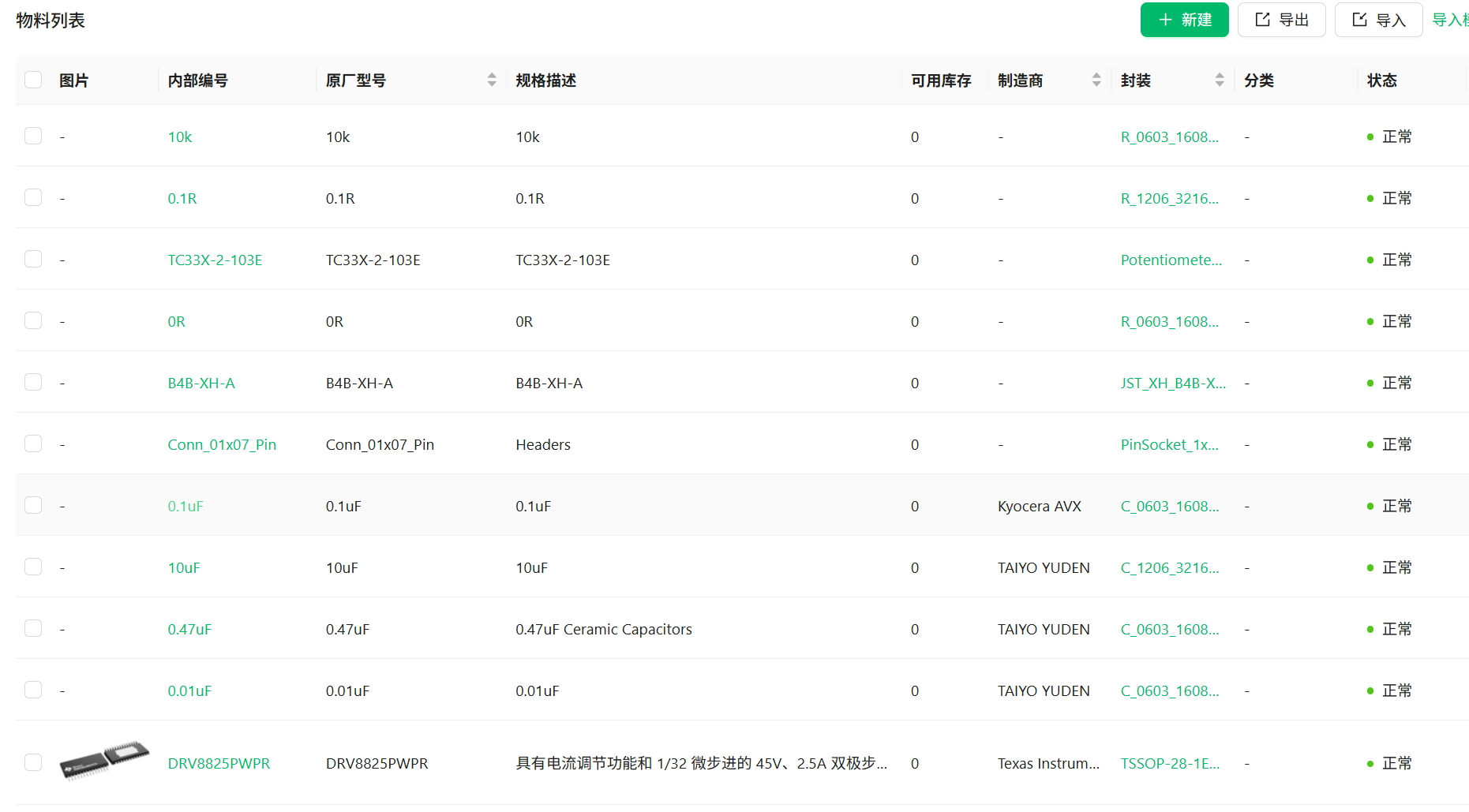
eZ-PLM系统物料列表

eZ-PLM系统项目详情图
- 针对本模块,将所需物料添加至eZ-PLM系统,并创建了对应的项目。
- 其中R1,R2,R3的0Ω电阻,实际上并不需要焊接,在项目BOM表中进行了删除。
六、心得体会
- 通过本次项目,我对步进电机驱动模块的设计有了更深入的了解,学习了如何根据电流、电压需求选型、如何在电路中考虑大电流和散热等问题。
- KICAD软件的使用,让我熟悉了从原理图到PCB设计的全过程,同时加深了对电子模块设计的规范要求认识。
- 在设计过程中,我学会了如何平衡功能性与尺寸,优化元器件的布局,并关注细节如热设计和电流管控,使模块在实际应用中能够可靠工作。
附件下载

Stepper_Motor_Driver_DRV8825.kicad_sch
KiCad原理图
Stepper_Motor_Driver_DRV8825.kicad_pcb
团队介绍
无
评论
0 / 100
查看更多
猜你喜欢
2025 Make Blocks阶段1 - FOC步进电机驱动这是一款安装在42步进电机背面的FOC驱动器,与电机相同尺寸,支持电流环、速度环、位置环三环FOC控制,支持多种通讯接口,包括CAN,MODBUS,RS485,UART,I2C以及常见的EN、DIR、STP控制,以及基于WIF的MQTT。
1291
2026 Make Blocks 2 阶段1 - 基于TMC2209的步进电机驱动模块设计以TMC2209-LA-T芯片为核心,其引脚排列兼容多款传统步进驱动器及TMC2208,并可作为SilentStepStick直接使用。
147
2026 Make Blocks #2阶段1 设计步进电机驱动板该项目使用了DRV8255芯片,实现了直流电机控制的设计,它的主要功能为:实现步进电机的驱动过程。。
184
