任务介绍
本次大赛所选任务为基于 DRV8833 的双路直流电机驱动模块设计,该模块可作为嵌入式智能小车、运动控制平台的动力驱动单元,为双路直流电机提供正反转、PWM 调速驱动,适用于小型移动机器人、智能小车等场景开发。
方案介绍
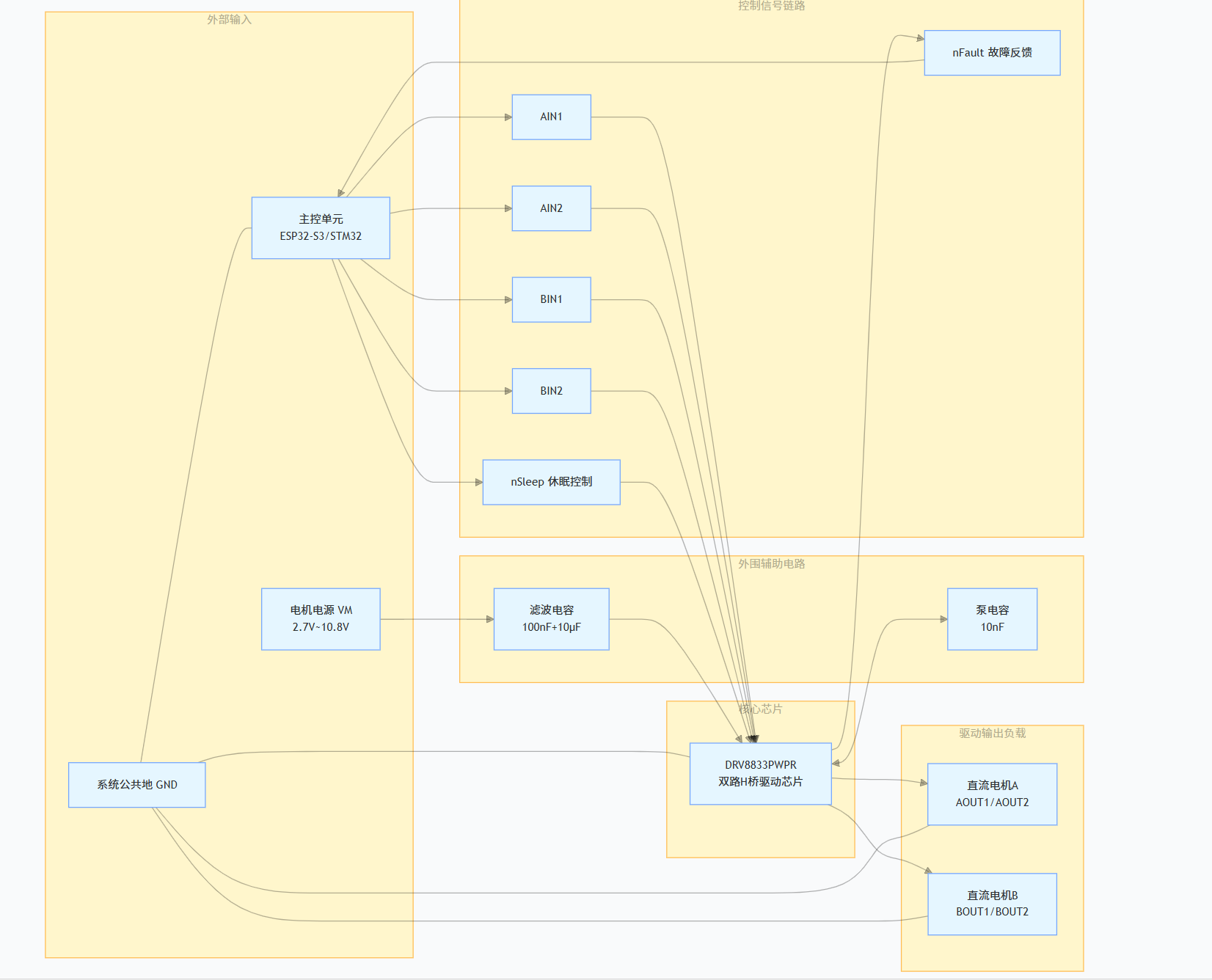
本设计以DRV8833PWPR 双路 H 桥电机驱动芯片为核心,搭建了一款集成电源滤波、电机驱动与故障检测功能的模块化驱动板。方案通过控制 AIN1/AIN2、BIN1/BIN2 信号,实现两路电机的正反转与转速调节;同时配置了电源滤波、泵电容、休眠控制与故障检测电路,保证驱动稳定可靠,可直接接入主控(如 ESP32-S3、STM32)与直流电机使用。
模块介绍
本次选用DRV8833PWPR 双路直流电机驱动芯片设计驱动模块,核心特性与应用场景如下:
- 芯片为 TI 出品的低电压、低功耗 H 桥驱动芯片,支持双路电机独立控制,单路最大驱动电流 1.5A,峰值电流 2A,可驱动小型直流减速电机,广泛应用于智能小车、玩具电机控制场景。
- 模块采用标准排针与接线端子接口,适配常见电机与主控板,可直接用于四驱 / 双驱小车、云台控制等项目开发。
DRV8833PWPR 芯片 DigiKey 链接:https://www.digikey.cn/zh/products/detail/texas-instruments/DRV8833PWPR/2743167?s=N4IgTCBcDaICICUBqAOFBmdAFA6lhIAugL5A
原理图和 PCB 模块介绍
原理图
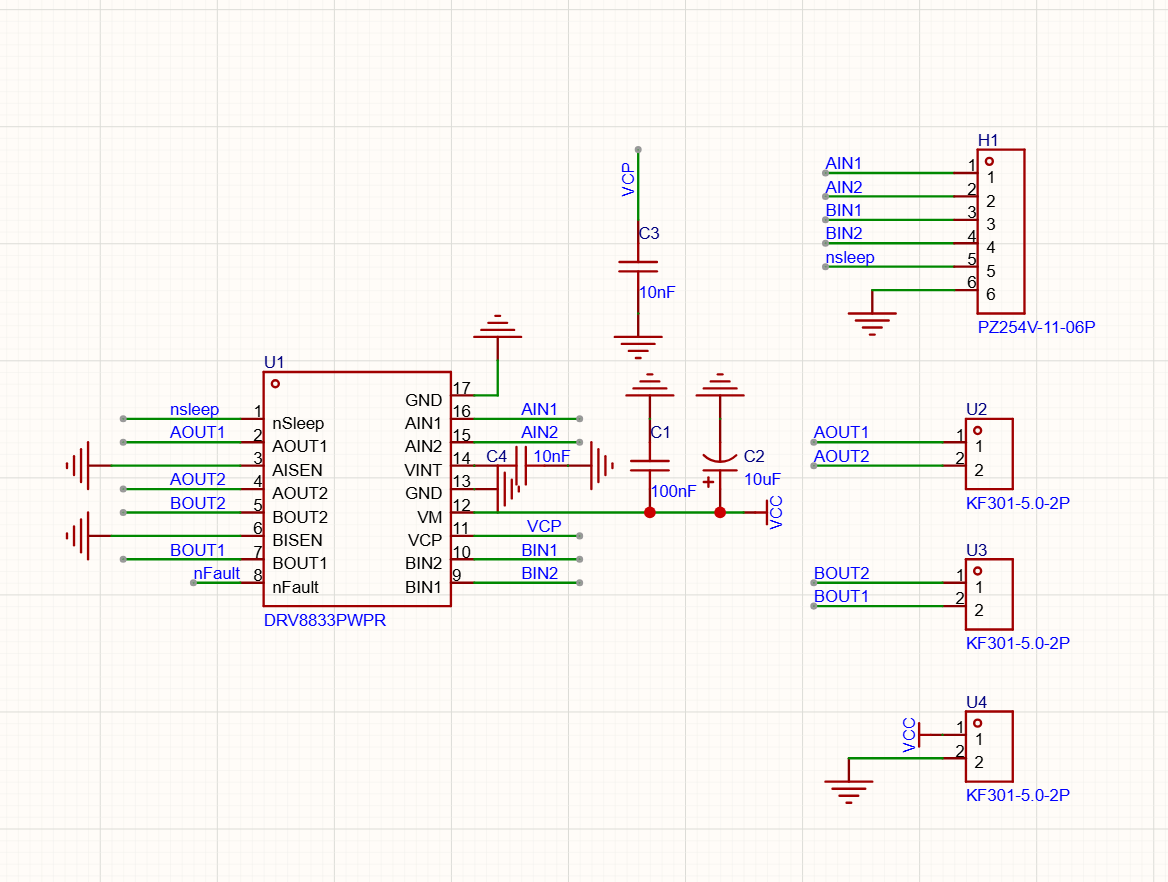
核心为 DRV8833PWPR 芯片及外围电路,关键设计如下:
- 电源电路:VM 引脚为电机电源输入端,配置 100nF 去耦电容与 10μF 大容量滤波电容,抑制电源纹波,保证驱动芯片供电稳定;VCP 引脚配置 10nF 泵电容,为内部电荷泵提供工作条件,确保 H 桥驱动正常输出。
- 控制信号接口:AIN1/AIN2、BIN1/BIN2 为两组电机的方向与调速控制引脚,通过标准排针引出,可直接连接主控 GPIO,支持高低电平控制方向、PWM 信号控制转速。
- 输出接口:AOUT1/AOUT2、BOUT1/BOUT2 为两路电机输出端,通过 KF301-5.0 接线端子引出,方便连接直流电机,接线稳定可靠。
- 功能控制引脚:nSleep 引脚可控制芯片休眠模式,降低闲置功耗;nFault 引脚可反馈过流、过温等故障状态,便于系统故障检测与保护。
PCB
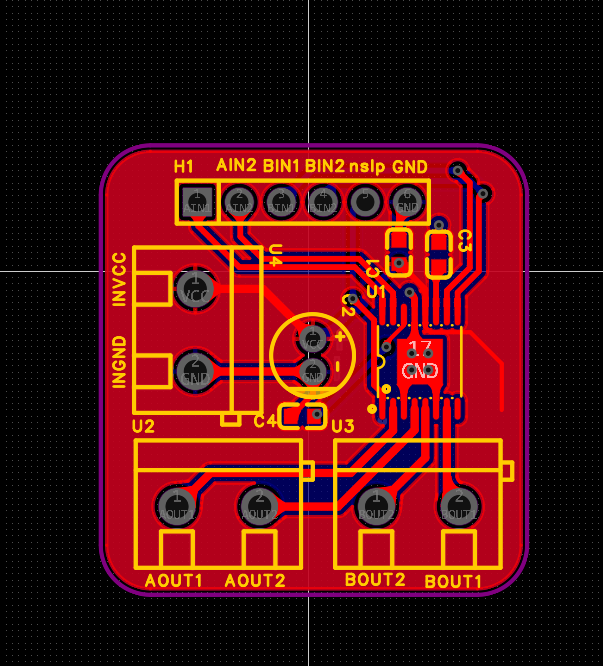
模块 PCB 设计遵循信号与电源分区布局原则,关键设计如下:
- 电源走线采用较宽铜箔,降低大电流下的压降与发热;控制信号走线短且直,减少信号干扰。
- 滤波电容靠近芯片电源引脚放置,最大化发挥去耦效果,提升电源稳定性。
- 接口布局清晰,控制信号排针与电机接线端子分区布置,避免接线交叉,便于调试与安装。
- 模块尺寸小巧,适配面包板与标准项目外壳,可直接集成到小型移动机器人项目中。
3D 效果图
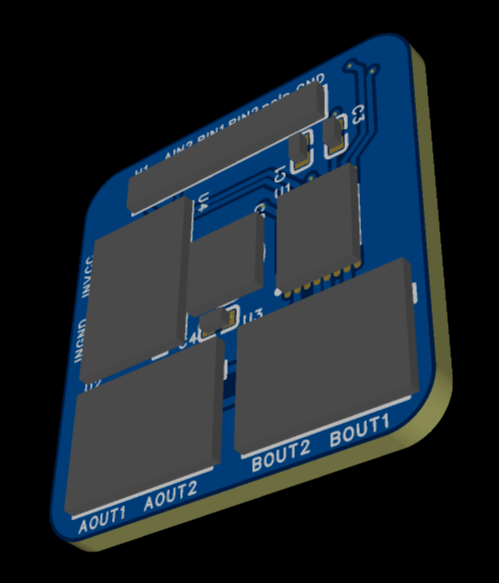
模块采用紧凑的贴片与插件混合布局,所有元件高度控制在合理范围内,无突出部件,便于安装在小车底盘或狭小空间内;接线端子与排针采用标准间距设计,适配常见杜邦线与电机接线,插拔方便,无需额外焊接即可快速搭建系统。
模块主要性能指标和管脚定义
主要性能指标
表格
类型 | 参数 |
|---|---|
驱动芯片 | DRV8833PWPR |
驱动路数 | 2 路独立控制 |
输入电压(VM) | 2.7V~10.8V |
单路连续输出电流 | 1.5A |
单路峰值输出电流 | 2A |
控制信号电平 | 3.3V/5V 兼容 |
控制方式 | 高低电平控制方向,PWM 控制转速 |
附加功能 | 休眠控制、故障检测、过流 / 过温保护 |
接口类型 | 排针(控制信号)+ 接线端子(电机输出) |
管脚定义
表格
管脚属性 | 管脚名 | 芯片引脚 | 描述 |
|---|---|---|---|
I/O | AIN1 | 16 | 电机 A 方向 / 调速控制输入 1 |
I/O | AIN2 | 15 | 电机 A 方向 / 调速控制输入 2 |
I/O | BIN1 | 9 | 电机 B 方向 / 调速控制输入 1 |
I/O | BIN2 | 10 | 电机 B 方向 / 调速控制输入 2 |
I/O | nSleep | 1 | 芯片休眠控制(低电平休眠) |
O | nFault | 8 | 故障状态输出(低电平有效) |
O | AOUT1 | 2 | 电机 A 输出端 1 |
O | AOUT2 | 3 | 电机 A 输出端 2 |
O | BOUT1 | 7 | 电机 B 输出端 1 |
O | BOUT2 | 6 | 电机 B 输出端 2 |
P | VM | 12 | 电机电源输入 |
P | GND | 13/17 | 电源地 |
心得体会
本次大赛中,我完成了基于 DRV8833 的双路电机驱动模块设计,深入掌握了 H 桥电机驱动芯片的工作原理、外围电路设计与 PCB 布局技巧。设计过程中,通过优化电源滤波、走线布局,解决了电机运转时的纹波干扰、驱动发热等问题,保证了模块驱动的稳定性与可靠性。
DRV8833 模块作为嵌入式项目的基础动力单元,其模块化设计思路也让我理解了标准化接口与可扩展性的重要性。后续可基于该模块,进一步开发智能小车、机械云台等项目,拓展模块的实际应用场景。本次设计提升了我对运动控制电路、电源设计与硬件调试的能力,为后续更复杂的嵌入式项目开发打下了坚实基础。

