一、任务介绍
在嵌入式控制系统、智能移动机器人、自动化运动控制以及全国大学生电子设计竞赛控制类题目中,直流有刷电机驱动电路是整个运动执行系统的核心底层硬件单元,其稳定性、响应速度、带载能力与抗干扰性能直接决定整机控制系统的可靠性。
本次项目任务为自主设计并绘制原理图、完成 PCB 布局布线,制作一款基于 TB6612FNG 集成 H 桥的双通道直流有刷电机驱动模块。项目严格遵循器件可采购、电气参数达标、结构标准化、接口通用化、电路高可靠性的设计原则。
项目具体设计要求如下:
- 驱动模块支持6V 及以上电机工作电压输入,满足常规小型直流有刷电机工作工况;
- 采用商用成熟集成驱动芯片,所有核心元器件可在 DigiKey 官方平台正常采购,保证设计工程化、可量产;
- 具备正转、反转、急停、刹车、PWM 无级调速完整控制功能;
- 预留标准化 2.54mm 排针接口,可直接匹配 STM32、MSPM0G3507 等主流单片机 IO 电平,实现无缝对接;
- 电路具备完善的过流、过热、短路、欠压保护机制,适配竞赛复杂电磁环境。
本模块设计完成后,可作为后续电赛小车控制系统、云台姿态控制系统、多执行机构运动控制系统的标准化底层驱动外设,具备极高的工程复用价值。
二、整体系统设计方案介绍
2.1 总体设计架构
本驱动模块整体采用 “双电源独立供电、信号隔离采集、集成 H 桥功率驱动、标准化对外接口”的分层设计架构,整体系统可划分为逻辑电源供电单元、功率电源供电单元、MCU 信号输入单元、H 桥功率驱动单元、电机输出执行单元、保护电路单元六大模块。
逻辑控制部分与功率驱动部分电气分区独立,有效规避大功率电机工作产生的纹波、尖峰电压与地弹噪声对主控信号造成干扰,符合模拟数字分区、强弱电分离的 PCB 高速布线规范。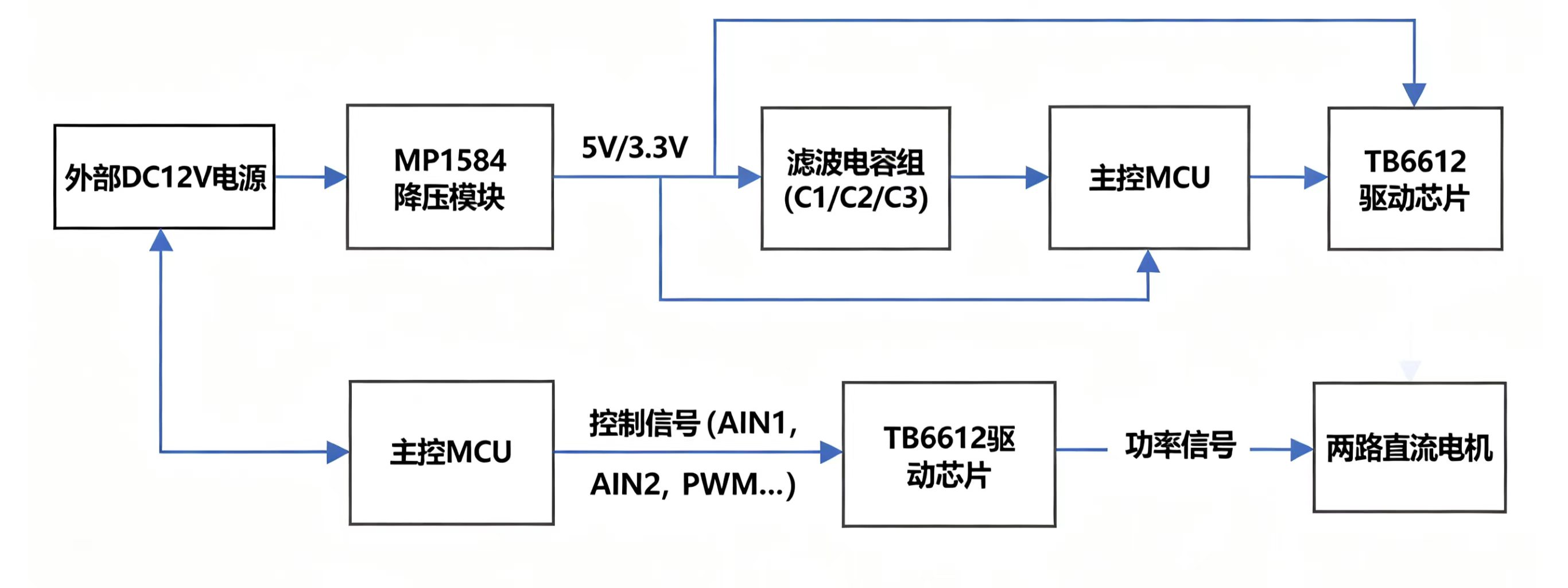
2.2 系统工作原理
主控单片机输出方向逻辑电平信号与PWM 调速脉冲信号送入 TB6612FNG 控制引脚,芯片内部逻辑电路解析电平组合,切换内部四路 MOS 管组成的 H 桥导通状态,改变电机两端电压极性实现正反转;通过调节输入 PWM 信号的占空比,改变电机两端等效平均电压,从而实现转速无级调节。
同时芯片内置硬件保护单元,实时监测芯片结温、输出回路电流与供电电压,一旦触发阈值立即锁存输出,保护芯片与后端负载设备安全。
三、核心器件选型与参数分析
3.1 主控制驱动芯片选型
本设计核心驱动器件选用TB6612FNG(东芝工业级 H 桥驱动芯片),所有器件可在 DigiKey 官网现货采购,器件型号完整、供应链稳定,符合项目商业化设计要求。
DigiKey 链接:TB6612FNG,C,8,EL | DigiKey
对比传统 L298N、L293D 等分立架构驱动芯片,TB6612FNG 具备显著工程优势:
- 导通损耗极低:内部采用低内阻 MOS 管架构,导通电阻极小,大电流工况下发热远低于传统驱动芯片,无需加装散热片,适合紧凑型 PCB 设计;
- 电流驱动能力充足:单路持续驱动电流 1.2A,峰值瞬时电流可达 3.2A,可满足绝大多数小型玩具电机、编码电机、减速电机的启动与堵转瞬时电流需求;
- 宽电压适配范围:电机功率电源输入范围 4.5V~15V,完全覆盖本次任务≥6V 的设计指标,兼容 7.4V、9V、12V 常用电机供电;逻辑电源 2.7V~5.5V,完美适配单片机 3.3V IO 电平,无需额外电平转换电路;
- 高频 PWM 兼容:支持最高 100kHz 高频 PWM 输入,相比传统芯片 20kHz 上限,调速平滑度更高、电机低频抖动更小,调速精度大幅提升;
- 集成多重硬件保护:内置过热关断、过流限流、输出短路保护、电源欠压锁定,无需外部额外保护电路,简化系统结构、提升整机稳定性;
- 双通道独立驱动:单芯片集成两路完整 H 桥,可同时独立驱动两台直流电机,集成度高、PCB 占用面积小。
3.2 辅助器件选型依据
- 高频陶瓷滤波电容:就近并联于芯片各电源引脚,负责滤除高频开关噪声、抑制电压纹波,改善瞬时负载跳变带来的电源波动;
- 电解滤波电容:并联在功率电源输入端,吸收电机启停、正反转切换产生的低频大能量电压尖峰,稳定母线电压;
- 标准排针接口:统一采用 2.54mm 工业标准间距,通用性强、插拔可靠、适配所有开发板底座。
所有无源器件均选用工业通用标准型号,采购便捷、兼容性强、成本低、可靠性高。
四、详细原理图电路设计分析,PCB 布局布线工程设计详解
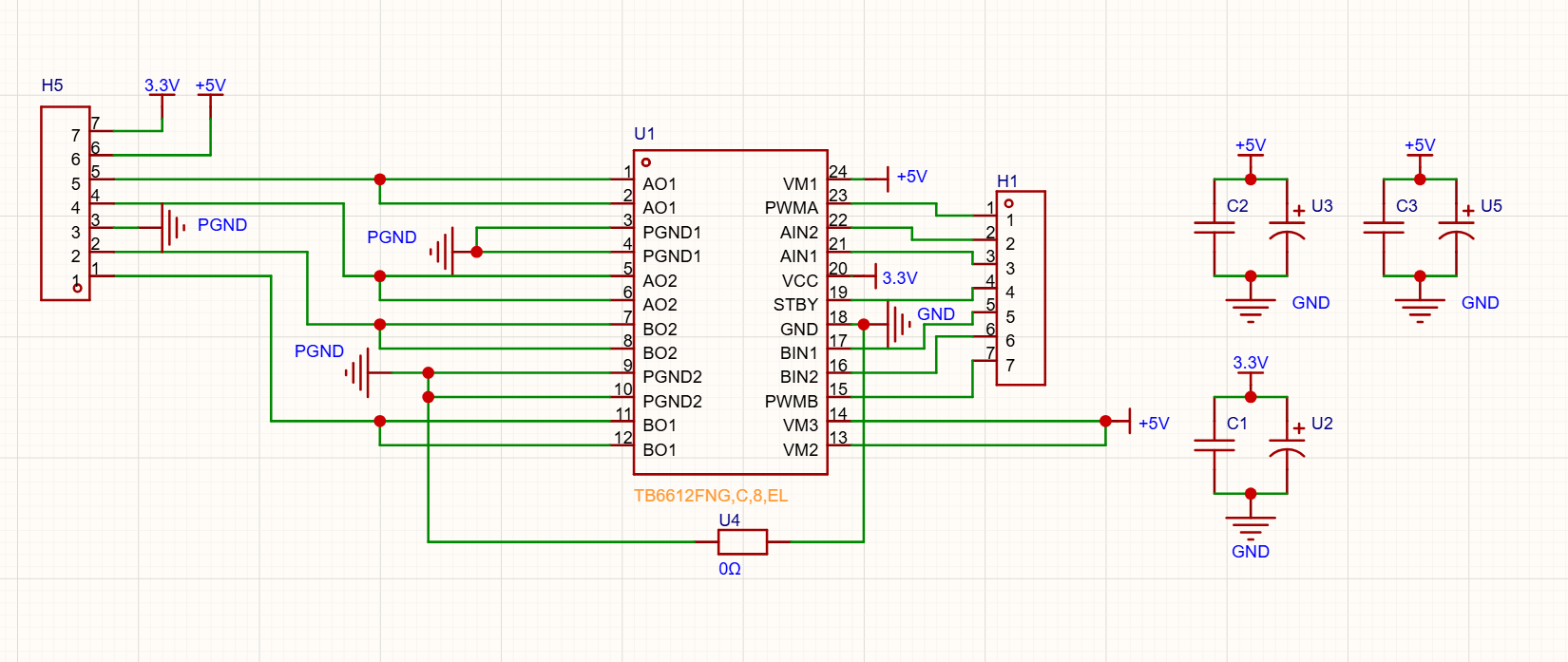
本次原理图设计严格按照数据手册典型应用电路搭建,结合竞赛工程实际需求做标准化优化,各单元电路设计细节如下:
双电源隔离供电电路设计
本芯片采用逻辑电源与功率电源完全分离的供电架构,是保证模块稳定工作的核心设计:
- VCC 逻辑电源(3.3V)
为芯片内部逻辑单元、信号解析电路、电平检测电路供电,电压精度要求高、噪声要求极低。电路采用就近陶瓷电容去耦,滤除 IO 翻转带来的高频噪声,保证控制逻辑不出现误触发、乱码、信号漂移问题。 - VM 功率电源(6~15V)
为 H 桥功率输出回路供电,承担电机全部工作电流。输入端采用 “电解电容 + 陶瓷电容” 组合滤波拓扑,实现高低频噪声全频段抑制,有效解决电机换向时的反向电动势与电压尖峰问题,防止高压脉冲击穿芯片或干扰主控系统。 - 地系统设计
严格区分信号地(SGND)与功率地(PGND),数字控制小电流回路与电机大电流回路物理分区,避免大功率地电流波动抬高地电位,导致控制电平参考偏移。
逻辑控制输入电路设计
模块预留完整的方向控制与调速信号接口,两路电机控制信号完全对称:
- AIN1、AIN2 为 A 路电机方向控制引脚,BIN1、BIN2 为 B 路电机方向控制引脚,通过高低电平组合定义正转、反转、停机状态;
- PWMA、PWMB 为两路独立 PWM 调速输入引脚,接收单片机输出的方波脉冲信号,通过占空比调节实现转速连续控制;
- STBY 待机引脚默认上拉至高电平,使芯片常态处于工作状态,保留外接控制能力,可由单片机控制模块休眠降耗。
所有输入引脚直接兼容 3.3V 单片机电平,输入阻抗高、无需限流电阻,简化外围电路同时保证信号完整性。
H 桥功率输出电路设计
芯片内部集成对称式四路 N 沟道 MOS 管构成标准 H 桥拓扑结构:
- 当对角 MOS 管交替导通时,电机两端形成正向或反向压差,实现转向切换;
- 通过快速开关 MOS 管配合 PWM 信号,实现电压斩波调速;
- 输出端直接引出至对外电机接口,走线短、阻抗低、压降小,保证电机动力输出充沛。
本次 PCB 采用双层印制电路板设计,严格遵循高速模拟电路、功率驱动电路的 PCB 设计规范,兼顾电气性能、电磁兼容性、散热性能与结构实用性。
整体布局规划
- 核心芯片居中布局
将 TB6612FNG 主芯片放置于 PCB 中心位置,使功率输出端、电源输入端、信号输入端走线距离最短,最大限度降低线路寄生电感与寄生电阻。 - 强弱电分区布局
板卡上半区域、左侧区域布置3.3V 弱电信号接口与控制电路;下半区域、右侧区域布置大功率电源、电机输出功率回路,强弱电物理分区明确,从布局源头降低串扰。 - 滤波器件就近布局
所有电源去耦电容严格紧贴芯片电源引脚放置,缩短电流回流路径,最大化发挥滤波去耦效果,抑制开关电源高频辐射噪声。
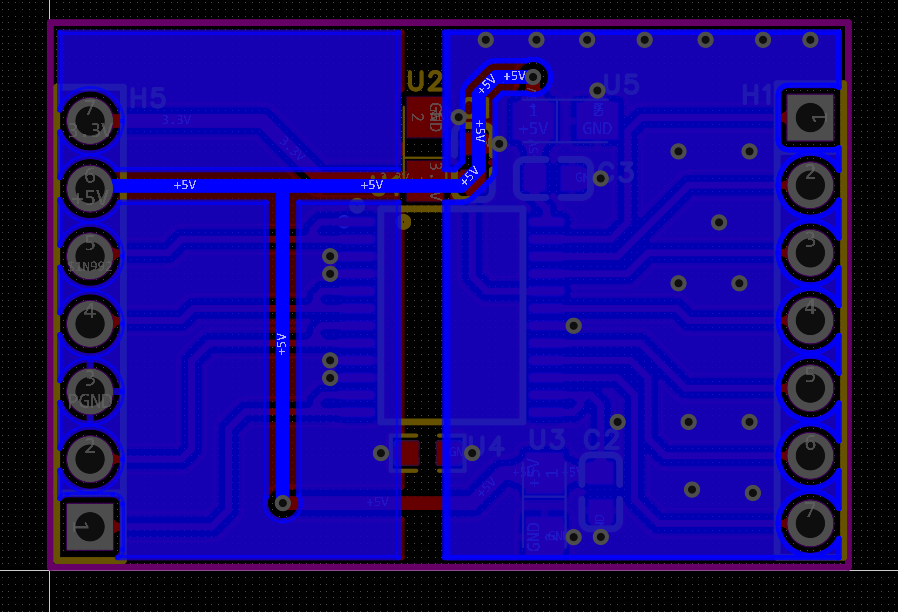
关键布线设计规范
- 功率走线加粗处理
电机功率电源线、H 桥输出动力走线采用宽线宽设计,降低大电流工况下的线损、压降与发热,提升带载能力,避免长时间工作导致线路老化。 - 信号走线短且直
PWM 调速信号线、方向控制信号线走线简洁、无过长绕线、无跨功率区域布线,减少电磁耦合干扰,保证 PWM 波形完整、调速精准无失真。 - 地平面完整性设计
底层大面积铺地,保证回流路径最短;功率地与信号地分区独立,单点汇接,彻底解决地弹噪声、共地干扰问题,是本模块稳定性的核心优化设计。 - 接口标准化布线
所有对外排针接口整齐排布,引脚顺序规整、定义统一,符合竞赛通用接线习惯,便于调试、接线与系统集成。
PCB 设计难点与优化方案
- 难点一:电机反向电动势干扰
优化:通过输入端口高低频复合滤波 + 功率地独立布线,吸收反向高压脉冲,避免干扰主控系统。 - 难点二:大电流发热与线路压降
优化:功率走线加粗、缩短大功率回路走线,降低导通损耗,提升散热能力。 - 难点三:PWM 信号波形畸变
优化:弱信号远离功率走线,减少平行耦合长度,保证调速信号高精度传输。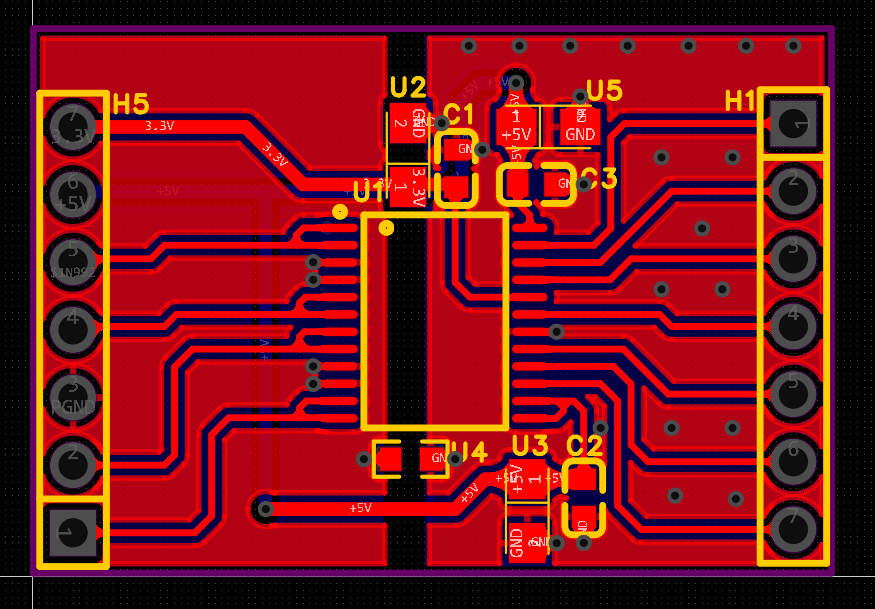
五、模块主要性能指标和管脚定义
核心电气性能参数
参数项目 | 技术指标 |
|---|---|
电机功率工作电压范围 | 4.5V~15V(满足≥6V 设计要求) |
逻辑控制工作电压范围 | 2.7V~5.5V(兼容 3.3V 主控系统) |
单路连续驱动电流 | 1.2A |
单路峰值瞬时电流 | 3.2A |
最大 PWM 工作频率 | 100kHz |
输入控制电平标准 | 3.3V TTL 电平 |
工作保护机制 | 过流保护、过热保护、短路保护、欠压锁存保护 |
驱动通道数量 | 双通道独立驱动 |
控制功能 | 正转、反转、停机、刹车、PWM 无级调速 |
主控信号接口(MCU 控制端)
引脚名称 | 功能说明 |
|---|---|
GND | 系统信号地 |
AIN1、AIN2 | A 通道电机方向控制信号 |
PWMA | A 通道 PWM 调速信号 |
BIN1、BIN2 | B 通道电机方向控制信号 |
PWMB | B 通道 PWM 调速信号 |
3.3V | 模块逻辑供电输入端 |
功率与电机输出接口(负载端)
引脚名称 | 功能说明 |
|---|---|
AO1、AO2 | A 路电机正负输出端 |
BO1、BO2 | B 路电机正负输出端 |
VM | 电机功率电源正极输入端 |
GND | 功率电源地 |
STBY | 芯片休眠使能引脚,高电平为正常工作状态 |
六、设计总结与工程心得体会
本次完整完成了TB6612FNG 直流有刷电机驱动模块的器件选型、原理分析、原理图绘制、PCB 布局布线与实物制作全流程设计,系统掌握了集成 H 桥驱动电路的底层工作原理、功率电路设计要点以及强弱电隔离的 PCB 工程设计方法。
在器件选型层面,通过多芯片横向对比,深刻理解了传统驱动芯片与新一代低功耗集成驱动芯片的性能差距,认识到低内阻、高频响应、集成保护电路是竞赛功率电路选型的核心准则。
在电路设计层面,系统掌握了双电源供电架构的设计逻辑,理解了滤波电容高低频搭配的工作机理,明确了电机反向电动势、电压尖峰、电源纹波等常见电气干扰的产生原因与抑制方案。
在 PCB 设计层面,深刻体会到强弱电分区、地系统分割、功率走线优化、信号完整性保护对于运动控制硬件稳定性的决定性作用。以往设计容易忽视的地弹噪声、走线串扰问题,在本次规范化布线中得到系统性解决,大幅提升了硬件电路的工程可靠性与抗干扰能力。
本次设计产出的驱动模块接口规范、性能稳定、保护完善、兼容性极强,可直接作为后续 2026 电赛控制系统的标准化底层硬件模块,为后续小车运动控制、多电机协同调速、闭环速度控制系统的开发奠定了扎实的硬件基础。
通过本次工程实践,我的模拟电路设计能力、PCB 高速布线思维、电源完整性设计思维以及竞赛硬件系统工程化设计思维得到全面提升,为后续复杂控制系统的设计与调试积累了关键经验。

 牟小强
牟小强