
一、项目介绍
本项目使用恩智浦的FRDM-MCXA346开发板实现ADC数据采集功能,并在1.8寸TFT显示屏上显示ADC转换结果。
1.1硬件介绍
本项目使用以下硬件构成:
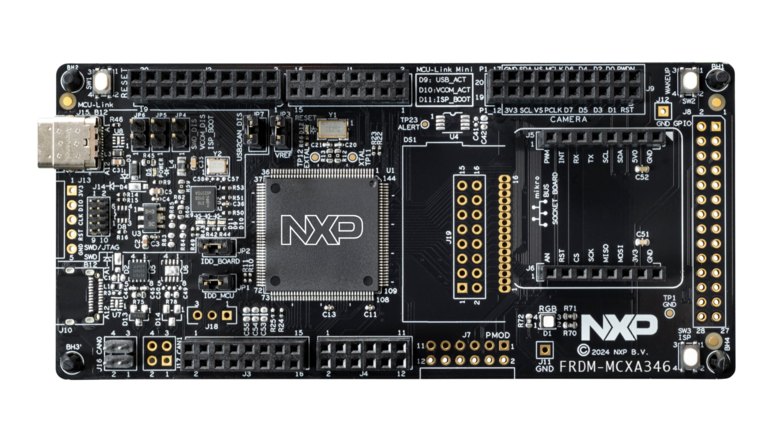
·FRDM-MCXA346
这是恩智浦公司推出的低成本Freedom 开发板,基于高性能 MCX A346 微控制器(Arm Cortex-M33)。 该开发板提供丰富的板载资源、完整的 Arduino 兼容引脚排列、OpenSDA 调试器,以及多种扩展接口, 是学习嵌入式开发、快速原型设计和产品验证的理想平台。
·可调电位器
这个电位器用来实现动态调整电压,改变ADC采集源。
·TFT显示屏
本项目中使用的是1.8寸的TFT显示屏,SPI接口,分辨率为120*160,驱动核心是ST7735。用来动态显示ADC的转换结果。

1.2功能概览
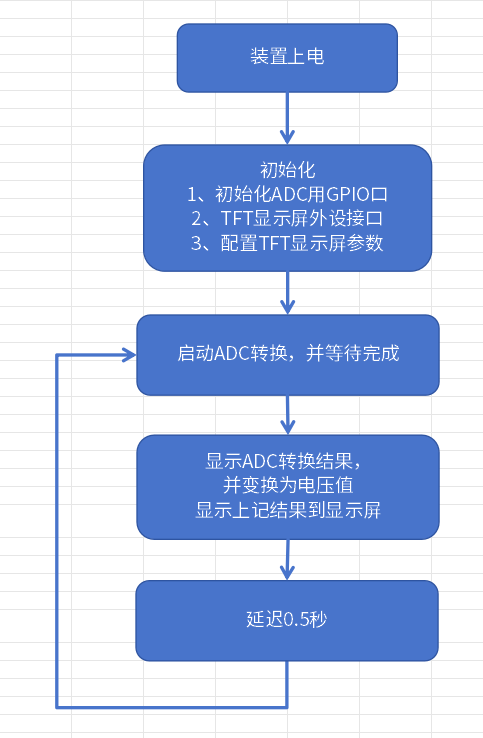
·装置上电
·初始化显示屏、ADC相关的GPIO口
·初始化ADC外设
·初始化显示屏的显示配置
·启动ADC采集转换处理并显示转换结果
1.2设计思路
实现功能预览的全部功能,实现步骤如下:
1)准备硬件和软件开发环境
2)连接电位器到主控板,电位器使用3.3V电压。
3)连接TFT显示屏到主控板FRDM-MCXA346。
4)编写代码,实现TFT显示屏正常显示;
二、功能实现
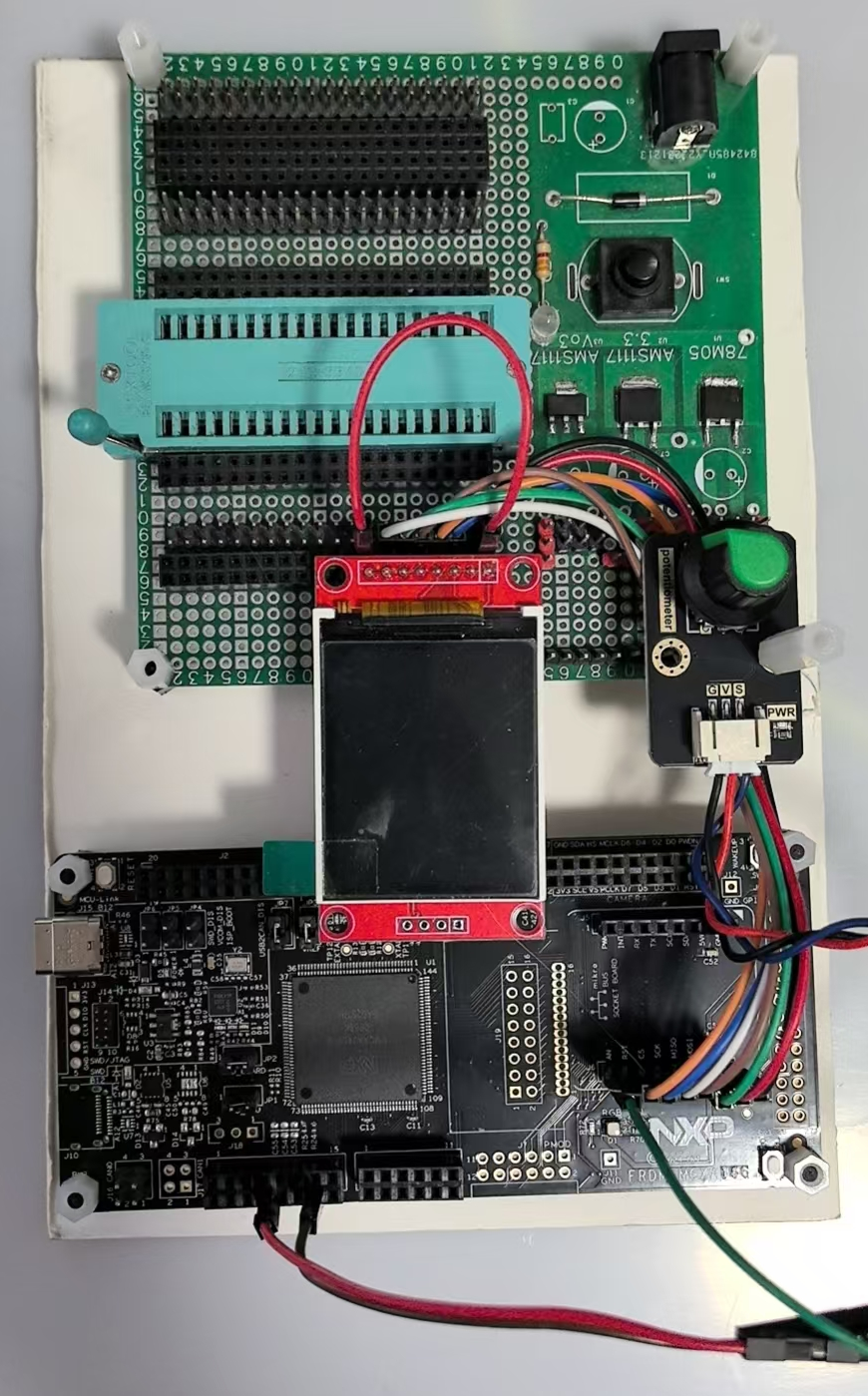
2.1 装置构成
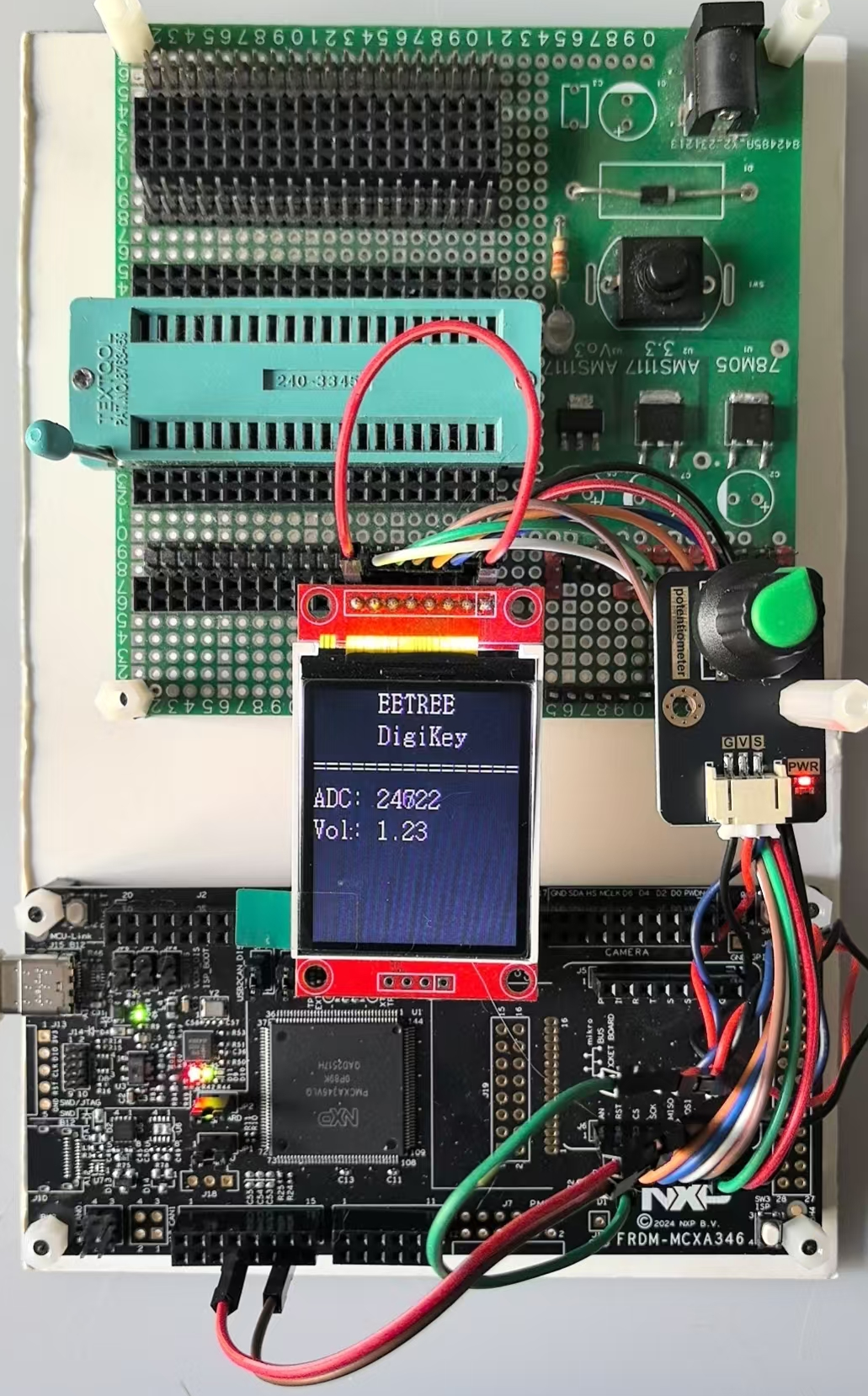
实物拍摄
2.2软件流程图
2.3实现过程
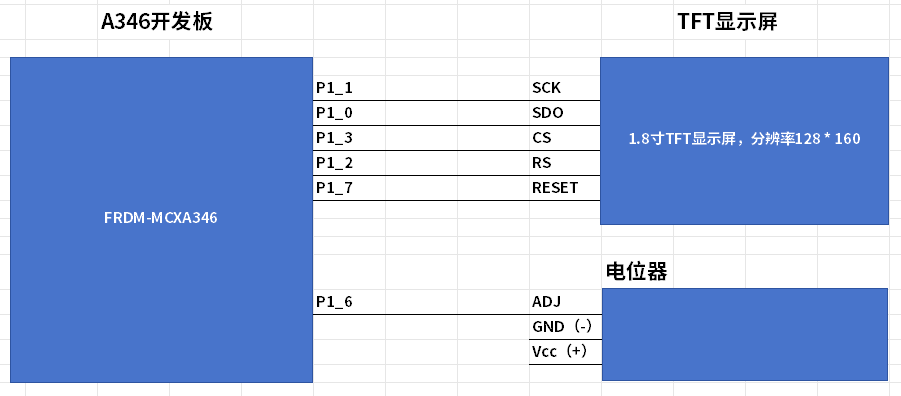
按照以下方式设置FRDM-MCXA346开发板、TFT显示屏之间、可调电阻
FRDM-MCXA346 TFT显示屏 可调电阻
============================================================
P1_6
P1_7 RESET
P1_3 CS
P1_1 SCK
P1_2 DC
P1_0 SDA
3V3 VCC
GND GND GND
3V3 LED Vcc
P1_6 可调端
===========================================================
各部分的关键代码:
2.3.1 GPIO初始化pin_mux.c
/* PORT2: Peripheral clock is enabled */
CLOCK_EnableClock(kCLOCK_GatePORT2);
/* LPUART2 peripheral is released from reset */
RESET_ReleasePeripheralReset(kLPUART2_RST_SHIFT_RSTn);
/* PORT2 peripheral is released from reset */
RESET_ReleasePeripheralReset(kPORT2_RST_SHIFT_RSTn);
/* ADC0 peripheral is released from reset */
RESET_ReleasePeripheralReset(kADC0_RST_SHIFT_RSTn);
// P1口和SPI有关的GPIO:P1_0, P1_1, P1_3, P1_6, P1_7
CLOCK_EnableClock(kCLOCK_GateGPIO1);
CLOCK_EnableClock(kCLOCK_GatePORT1);
RESET_ReleasePeripheralReset(kGPIO1_RST_SHIFT_RSTn);
RESET_ReleasePeripheralReset(kPORT1_RST_SHIFT_RSTn);
// 串口使用P2_35,P2_36
const port_pin_config_t port2_2_pin35_config = {/* Internal pull-up resistor is enabled */
.pullSelect = kPORT_PullUp,
/* Low internal pull resistor value is selected. */
.pullValueSelect = kPORT_LowPullResistor,
/* Fast slew rate is configured */
.slewRate = kPORT_FastSlewRate,
/* Passive input filter is disabled */
.passiveFilterEnable = kPORT_PassiveFilterDisable,
/* Open drain output is disabled */
.openDrainEnable = kPORT_OpenDrainDisable,
/* Low drive strength is configured */
.driveStrength = kPORT_LowDriveStrength,
/* Normal drive strength is configured */
.driveStrength1 = kPORT_NormalDriveStrength,
/* Pin is configured as LPUART2_TXD */
.mux = kPORT_MuxAlt3,
/* Digital input enabled */
.inputBuffer = kPORT_InputBufferEnable,
/* Digital input is not inverted */
.invertInput = kPORT_InputNormal,
/* Pin Control Register fields [15:0] are not locked */
.lockRegister = kPORT_UnlockRegister};
/* PORT2_2 (pin 35) is configured as LPUART2_TXD */
PORT_SetPinConfig(PORT2, 2U, &port2_2_pin35_config);
const port_pin_config_t port2_3_pin36_config = {/* Internal pull-up resistor is enabled */
.pullSelect = kPORT_PullUp,
/* Low internal pull resistor value is selected. */
.pullValueSelect = kPORT_LowPullResistor,
/* Fast slew rate is configured */
.slewRate = kPORT_FastSlewRate,
/* Passive input filter is disabled */
.passiveFilterEnable = kPORT_PassiveFilterDisable,
/* Open drain output is disabled */
.openDrainEnable = kPORT_OpenDrainDisable,
/* Low drive strength is configured */
.driveStrength = kPORT_LowDriveStrength,
/* Normal drive strength is configured */
.driveStrength1 = kPORT_NormalDriveStrength,
/* Pin is configured as LPUART2_RXD */
.mux = kPORT_MuxAlt3,
/* Digital input enabled */
.inputBuffer = kPORT_InputBufferEnable,
/* Digital input is not inverted */
.invertInput = kPORT_InputNormal,
/* Pin Control Register fields [15:0] are not locked */
.lockRegister = kPORT_UnlockRegister};
/* PORT2_3 (pin 36) is configured as LPUART2_RXD */
PORT_SetPinConfig(PORT2, 3U, &port2_3_pin36_config);
// TFT显示屏使用的SPI口用到的GPIO
//------------------------------------------------------------------------------------------------
gpio_pin_config_t output_config = {
.pinDirection = kGPIO_DigitalOutput,
.outputLogic = 0U
};
GPIO_PinInit(GPIO1, PIN_SDO, &output_config); // SDA
GPIO_PinInit(GPIO1, PIN_SCK, &output_config); // SCK
GPIO_PinInit(GPIO1, PIN_CS, &output_config); // CS
GPIO_PinInit(GPIO1, PIN_RS, &output_config); // DC
GPIO_PinInit(GPIO1, PIN_RST, &output_config); // RESET
const port_pin_config_t OUT = {/* Internal pull-up/down resistor is disabled */
.pullSelect = kPORT_PullDisable,
/* Low internal pull resistor value is selected. */
.pullValueSelect = kPORT_LowPullResistor,
/* Fast slew rate is configured */
.slewRate = kPORT_FastSlewRate,
/* Passive input filter is disabled */
.passiveFilterEnable = kPORT_PassiveFilterDisable,
/* Open drain output is disabled */
.openDrainEnable = kPORT_OpenDrainDisable,
/* Low drive strength is configured */
.driveStrength = kPORT_LowDriveStrength,
/* Normal drive strength is configured */
.driveStrength1 = kPORT_NormalDriveStrength,
/* Pin is configured as P3_18 */
.mux = kPORT_MuxAlt0,
/* Digital input enabled */
.inputBuffer = kPORT_InputBufferEnable,
/* Digital input is not inverted */
.invertInput = kPORT_InputNormal,
/* Pin Control Register fields [15:0] are not locked */
.lockRegister = kPORT_UnlockRegister};
// P1口和SPI有关的GPIO:P1_0,P1_1,P1_3
PORT_SetPinConfig(PORT1, PIN_SDO, &OUT);
PORT_SetPinConfig(PORT1, PIN_SCK, &OUT);
PORT_SetPinConfig(PORT1, PIN_CS, &OUT);
PORT_SetPinConfig(PORT1, PIN_RS, &OUT);
PORT_SetPinConfig(PORT1, PIN_RST, &OUT);
//-------------------------------------------------------------------------------------------------
ADC部分:
// ADC采集口P1_6 : ADC0_A22
const port_pin_config_t port1_6_config = {/* Internal pull-up/down resistor is disabled */
.pullSelect = kPORT_PullDisable,
/* Low internal pull resistor value is selected. */
.pullValueSelect = kPORT_LowPullResistor,
/* Fast slew rate is configured */
.slewRate = kPORT_FastSlewRate,
/* Passive input filter is disabled */
.passiveFilterEnable = kPORT_PassiveFilterDisable,
/* Open drain output is disabled */
.openDrainEnable = kPORT_OpenDrainDisable,
/* Low drive strength is configured */
.driveStrength = kPORT_LowDriveStrength,
/* Normal drive strength is configured */
.driveStrength1 = kPORT_NormalDriveStrength,
/* Pin is configured as ADC1_A8 */
.mux = kPORT_MuxAlt0,
/* Digital input disabled; it is required for analog functions */
.inputBuffer = kPORT_InputBufferDisable,
/* Digital input is not inverted */
.invertInput = kPORT_InputNormal,
/* Pin Control Register fields [15:0] are not locked */
.lockRegister = kPORT_UnlockRegister};
/* PORT1_10 (pin 3) is configured as ADC0_A22 */
PORT_SetPinConfig(PORT1, 6U, &port1_6_config);
2.3.2 TFT显示屏的处理代码(Lcd_Driver.c):
#include "pin_mux.h"
#include "board.h"
#include "font.h"
#include "Lcd_Driver.h"
extern void delay_ms(uint32_t ms);
extern volatile uint32_t g_systickCounter;
// 常用方向定义(根据你的接线方式调整)
#define ST7735_MADCTL_MY 0x80 // 行地址顺序
#define ST7735_MADCTL_MX 0x40 // 列地址顺序
#define ST7735_MADCTL_MV 0x20 // 行列交换
#define ST7735_MADCTL_ML 0x10 // 垂直刷新顺序
#define ST7735_MADCTL_RGB 0x00 // RGB顺序
#define ST7735_MADCTL_BGR 0x08 // BGR顺序
#define ST7735_MADCTL_MH 0x04 // 水平刷新顺序
// 当前显示方向
static st7735_rotation_t current_rotation = ST7735_ROTATION_0;
// 根据模块和接线定义方向表
// 常见的四种方向配置(可能需要根据具体模块调整)
static const st7735_orientation_t orientation_table[] = {
// 0度
{
.madctl = ST7735_MADCTL_MX | ST7735_MADCTL_MY | ST7735_MADCTL_RGB,
.width = SCREEN_WIDTH,
.height = SCREEN_HEIGH,
.x_start = 0,
.y_start = 0
},
// 90度
{
.madctl = ST7735_MADCTL_MY | ST7735_MADCTL_MV | ST7735_MADCTL_RGB,
.width = SCREEN_HEIGH,
.height = SCREEN_WIDTH,
.x_start = 0,
.y_start = 0
},
// 180度
{
.madctl = ST7735_MADCTL_RGB,
.width = SCREEN_WIDTH,
.height = SCREEN_HEIGH,
.x_start = 0,
.y_start = 0
},
// 270度
{
.madctl = ST7735_MADCTL_MX | ST7735_MADCTL_MV | ST7735_MADCTL_RGB,
.width = SCREEN_HEIGH,
.height = SCREEN_WIDTH,
.x_start = 0,
.y_start = 0
}
};
//液晶IO初始化配置
void LCD_GPIO_Init(void) {
LCD_CS_SET; // CS = 1;
LCD_RST_SET; // RST = 1
LCD_RS_SET; // DC = 1
LCD_SCK_CLR; // SCK = 0
LCD_SDO_CLR; // SDO = 0
}
//向SPI总线传输一个8位数据
void SPI_WriteData(uint8_t Data) {
for (int counter = 0; counter < 8; counter++) {
LCD_SCK_CLR;
if ((Data & 0x80) == 0) {
LCD_SDO_CLR;
} else
LCD_SDO_SET;
Data = Data << 1;
LCD_SCK_SET;
}
LCD_SCK_CLR;
}
//向液晶屏写一个8位指令
void Lcd_WriteCmd(uint8_t Index) {
//SPI 写命令时序开始
LCD_CS_CLR;
LCD_RS_CLR;
SPI_WriteData(Index);
LCD_CS_SET;
}
//向液晶屏写一个8位数据
void Lcd_WriteData(uint8_t Data) {
LCD_CS_CLR;
LCD_RS_SET;
SPI_WriteData(Data);
LCD_CS_SET;
}
//向液晶屏写一个16位数据
void LCD_WriteData_16Bit(uint16_t Data) {
LCD_CS_CLR;
LCD_RS_SET;
SPI_WriteData(Data >> 8); //写入高8位数据
SPI_WriteData(Data); //写入低8位数据
LCD_CS_SET;
}
void Lcd_WriteReg(uint8_t Index, uint8_t Data) {
Lcd_WriteCmd(Index);
Lcd_WriteData(Data);
}
void Lcd_Reset(void) {
LCD_RST_CLR;
delay_ms(100);
LCD_RST_SET;
delay_ms(100);
}
//LCD Init For 1.44Inch LCD Panel with ST7735R.
void Lcd_Init(void) {
LCD_GPIO_Init();
Lcd_Reset(); //Reset before LCD Init.
//LCD Init For 1.44Inch LCD Panel with ST7735R.
Lcd_WriteCmd(0x11); //Sleep exit
delay_ms(200);
Lcd_WriteCmd(0xB1);
Lcd_WriteData(0x01);
Lcd_WriteData(0x2C);
Lcd_WriteData(0x2D);
Lcd_WriteCmd(0xB2);
Lcd_WriteData(0x01);
Lcd_WriteData(0x2C);
Lcd_WriteData(0x2D);
Lcd_WriteCmd(0xB3);
Lcd_WriteData(0x01);
Lcd_WriteData(0x2C);
Lcd_WriteData(0x2D);
Lcd_WriteData(0x01);
Lcd_WriteData(0x2C);
Lcd_WriteData(0x2D);
Lcd_WriteCmd(0xB4); //Column inversion
Lcd_WriteData(0x07);
//ST7735R Power Sequence
Lcd_WriteCmd(0xC0);
Lcd_WriteData(0xA2);
Lcd_WriteData(0x02);
Lcd_WriteData(0x84);
Lcd_WriteCmd(0xC1);
Lcd_WriteData(0xC5);
Lcd_WriteCmd(0xC2);
Lcd_WriteData(0x0A);
Lcd_WriteData(0x00);
Lcd_WriteCmd(0xC3);
Lcd_WriteData(0x8A);
Lcd_WriteData(0x2A);
Lcd_WriteCmd(0xC4);
Lcd_WriteData(0x8A);
Lcd_WriteData(0xEE);
Lcd_WriteCmd(0xC5); //VCOM
Lcd_WriteData(0x0E);
Lcd_WriteCmd(0x36); //MX, MY, RGB mode
Lcd_WriteData(0xC0);
//ST7735R Gamma Sequence
Lcd_WriteCmd(0xe0);
Lcd_WriteData(0x0f);
Lcd_WriteData(0x1a);
Lcd_WriteData(0x0f);
Lcd_WriteData(0x18);
Lcd_WriteData(0x2f);
Lcd_WriteData(0x28);
Lcd_WriteData(0x20);
Lcd_WriteData(0x22);
Lcd_WriteData(0x1f);
Lcd_WriteData(0x1b);
Lcd_WriteData(0x23);
Lcd_WriteData(0x37);
Lcd_WriteData(0x00);
Lcd_WriteData(0x07);
Lcd_WriteData(0x02);
Lcd_WriteData(0x10);
Lcd_WriteCmd(0xe1);
Lcd_WriteData(0x0f);
Lcd_WriteData(0x1b);
Lcd_WriteData(0x0f);
Lcd_WriteData(0x17);
Lcd_WriteData(0x33);
Lcd_WriteData(0x2c);
Lcd_WriteData(0x29);
Lcd_WriteData(0x2e);
Lcd_WriteData(0x30);
Lcd_WriteData(0x30);
Lcd_WriteData(0x39);
Lcd_WriteData(0x3f);
Lcd_WriteData(0x00);
Lcd_WriteData(0x07);
Lcd_WriteData(0x03);
Lcd_WriteData(0x10);
Lcd_WriteCmd(0x2a);
Lcd_WriteData(0x00);
Lcd_WriteData(0x00);
Lcd_WriteData(0x00);
Lcd_WriteData(0x7f);
Lcd_WriteCmd(0x2b);
Lcd_WriteData(0x00);
Lcd_WriteData(0x00);
Lcd_WriteData(0x00);
Lcd_WriteData(0x9f);
Lcd_WriteCmd(0xF0); //Enable test command
Lcd_WriteData(0x01);
Lcd_WriteCmd(0xF6); //Disable ram power save mode
Lcd_WriteData(0x00);
Lcd_WriteCmd(0x3A); //65k mode
Lcd_WriteData(0x05);
//ST7735R Frame Rate
Set_Rotation(ST7735_ROTATION_180);
Lcd_WriteCmd(0x29); //Display on
// LCD_LED_CLR;
}
/*************************************************
函数名:LCD_Set_Region
功能:设置lcd显示区域,在此区域写点数据自动换行
入口参数:xy起点和终点
返回值:无
*************************************************/
void Lcd_SetRegion(uint16_t x_start, uint16_t y_start, uint16_t x_end,
uint16_t y_end) {
Lcd_WriteCmd(0x2a);
Lcd_WriteData(0x00);
Lcd_WriteData(x_start); //Lcd_WriteData(x_start+2);
Lcd_WriteData(0x00);
Lcd_WriteData(x_end + 2);
Lcd_WriteCmd(0x2b);
Lcd_WriteData(0x00);
Lcd_WriteData(y_start + 0);
Lcd_WriteData(0x00);
Lcd_WriteData(y_end + 1);
Lcd_WriteCmd(0x2c);
}
/*************************************************
函数名:LCD_Set_XY
功能:设置lcd显示起始点
入口参数:xy坐标
返回值:无
*************************************************/
void Lcd_SetXY(uint16_t x, uint16_t y) {
Lcd_SetRegion(x, y, x, y);
}
/*************************************************
函数名:LCD_DrawPoint
功能:画一个点
入口参数:无
返回值:无
*************************************************/
void Gui_DrawPoint(uint16_t x, uint16_t y, uint16_t Data) {
Lcd_SetRegion(x, y, x + 1, y + 1);
LCD_WriteData_16Bit(Data);
}
/*****************************************
函数功能:读TFT某一点的颜色
出口参数:color 点颜色值
******************************************/
unsigned int Lcd_ReadPoint(uint16_t x, uint16_t y) {
unsigned int Data;
Lcd_SetXY(x, y);
//Lcd_ReadData();//丢掉无用字节
//Data=Lcd_ReadData();
Lcd_WriteData(Data);
return Data;
}
/*************************************************
函数名:Lcd_Clear
功能:全屏清屏函数
入口参数:填充颜色COLOR
返回值:无
*************************************************/
void Lcd_Clear(uint16_t Color) {
unsigned int i, m;
Lcd_SetRegion(0, 0, SCREEN_WIDTH - 1, SCREEN_HEIGH - 1);
Lcd_WriteCmd(0x2C);
for (i = 0; i < SCREEN_WIDTH; i++)
for (m = 0; m < SCREEN_HEIGH; m++) {
LCD_WriteData_16Bit(Color);
}
}
void Gui_Circle(uint16_t X, uint16_t Y, uint16_t R, uint16_t fc) { //Bresenham算法
unsigned short a, b;
int c;
a = 0;
b = R;
c = 3 - 2 * R;
while (a < b) {
Gui_DrawPoint(X + a, Y + b, fc); // 7
Gui_DrawPoint(X - a, Y + b, fc); // 6
Gui_DrawPoint(X + a, Y - b, fc); // 2
Gui_DrawPoint(X - a, Y - b, fc); // 3
Gui_DrawPoint(X + b, Y + a, fc); // 8
Gui_DrawPoint(X - b, Y + a, fc); // 5
Gui_DrawPoint(X + b, Y - a, fc); // 1
Gui_DrawPoint(X - b, Y - a, fc); // 4
if (c < 0)
c = c + 4 * a + 6;
else {
c = c + 4 * (a - b) + 10;
b -= 1;
}
a += 1;
}
if (a == b) {
Gui_DrawPoint(X + a, Y + b, fc);
Gui_DrawPoint(X + a, Y + b, fc);
Gui_DrawPoint(X + a, Y - b, fc);
Gui_DrawPoint(X - a, Y - b, fc);
Gui_DrawPoint(X + b, Y + a, fc);
Gui_DrawPoint(X - b, Y + a, fc);
Gui_DrawPoint(X + b, Y - a, fc);
Gui_DrawPoint(X - b, Y - a, fc);
}
}
//画线函数,使用Bresenham 画线算法
void Gui_DrawLine(uint16_t x0, uint16_t y0, uint16_t x1, uint16_t y1,
uint16_t Color) {
int dx, // difference in x's
dy, // difference in y's
dx2, // dx,dy * 2
dy2, x_inc, // amount in pixel space to move during drawing
y_inc, // amount in pixel space to move during drawing
error, // the discriminant i.e. error i.e. decision variable
index; // used for looping
Lcd_SetXY(x0, y0);
dx = x1 - x0; //计算x距离
dy = y1 - y0; //计算y距离
if (dx >= 0) {
x_inc = 1;
} else {
x_inc = -1;
dx = -dx;
}
if (dy >= 0) {
y_inc = 1;
} else {
y_inc = -1;
dy = -dy;
}
dx2 = dx << 1;
dy2 = dy << 1;
if (dx > dy) //x距离大于y距离,那么每个x轴上只有一个点,每个y轴上有若干个点
{ //且线的点数等于x距离,以x轴递增画点
// initialize error term
error = dy2 - dx;
// draw the line
for (index = 0; index <= dx; index++) //要画的点数不会超过x距离
{
//画点
Gui_DrawPoint(x0, y0, Color);
// test if error has overflowed
if (error >= 0) //是否需要增加y坐标值
{
error -= dx2;
// move to next line
y0 += y_inc; //增加y坐标值
} // end if error overflowed
// adjust the error term
error += dy2;
// move to the next pixel
x0 += x_inc; //x坐标值每次画点后都递增1
} // end for
} // end if |slope| <= 1
else //y轴大于x轴,则每个y轴上只有一个点,x轴若干个点
{ //以y轴为递增画点
// initialize error term
error = dx2 - dy;
// draw the line
for (index = 0; index <= dy; index++) {
// set the pixel
Gui_DrawPoint(x0, y0, Color);
// test if error overflowed
if (error >= 0) {
error -= dy2;
// move to next line
x0 += x_inc;
} // end if error overflowed
// adjust the error term
error += dx2;
// move to the next pixel
y0 += y_inc;
} // end for
} // end else |slope| > 1
}
void Gui_box(uint16_t x, uint16_t y, uint16_t w, uint16_t h, uint16_t bc) {
Gui_DrawLine(x, y, x + w, y, 0xEF7D);
Gui_DrawLine(x + w - 1, y + 1, x + w - 1, y + 1 + h, 0x2965);
Gui_DrawLine(x, y + h, x + w, y + h, 0x2965);
Gui_DrawLine(x, y, x, y + h, 0xEF7D);
Gui_DrawLine(x + 1, y + 1, x + 1 + w - 2, y + 1 + h - 2, bc);
}
void Gui_box2(uint16_t x, uint16_t y, uint16_t w, uint16_t h, uint8_t mode) {
if (mode == 0) {
Gui_DrawLine(x, y, x + w, y, 0xEF7D);
Gui_DrawLine(x + w - 1, y + 1, x + w - 1, y + 1 + h, 0x2965);
Gui_DrawLine(x, y + h, x + w, y + h, 0x2965);
Gui_DrawLine(x, y, x, y + h, 0xEF7D);
}
if (mode == 1) {
Gui_DrawLine(x, y, x + w, y, 0x2965);
Gui_DrawLine(x + w - 1, y + 1, x + w - 1, y + 1 + h, 0xEF7D);
Gui_DrawLine(x, y + h, x + w, y + h, 0xEF7D);
Gui_DrawLine(x, y, x, y + h, 0x2965);
}
if (mode == 2) {
Gui_DrawLine(x, y, x + w, y, 0xffff);
Gui_DrawLine(x + w - 1, y + 1, x + w - 1, y + 1 + h, 0xffff);
Gui_DrawLine(x, y + h, x + w, y + h, 0xffff);
Gui_DrawLine(x, y, x, y + h, 0xffff);
}
}
/**************************************************************************************
功能描述: 在屏幕显示一凸起的按钮框
输 入: uint16_t x1,y1,x2,y2 按钮框左上角和右下角坐标
输 出: 无
**************************************************************************************/
void DisplayButtonDown(uint16_t x1, uint16_t y1, uint16_t x2, uint16_t y2) {
Gui_DrawLine(x1, y1, x2, y1, GRAY2); //H
Gui_DrawLine(x1 + 1, y1 + 1, x2, y1 + 1, GRAY1); //H
Gui_DrawLine(x1, y1, x1, y2, GRAY2); //V
Gui_DrawLine(x1 + 1, y1 + 1, x1 + 1, y2, GRAY1); //V
Gui_DrawLine(x1, y2, x2, y2, WHITE); //H
Gui_DrawLine(x2, y1, x2, y2, WHITE); //V
}
/**************************************************************************************
功能描述: 在屏幕显示一凹下的按钮框
输 入: uint16_t x1,y1,x2,y2 按钮框左上角和右下角坐标
输 出: 无
**************************************************************************************/
void DisplayButtonUp(uint16_t x1, uint16_t y1, uint16_t x2, uint16_t y2) {
Gui_DrawLine(x1, y1, x2, y1, WHITE); //H
Gui_DrawLine(x1, y1, x1, y2, WHITE); //V
Gui_DrawLine(x1 + 1, y2 - 1, x2, y2 - 1, GRAY1); //H
Gui_DrawLine(x1, y2, x2, y2, GRAY2); //H
Gui_DrawLine(x2 - 1, y1 + 1, x2 - 1, y2, GRAY1); //V
Gui_DrawLine(x2, y1, x2, y2, GRAY2); //V
}
void Gui_DrawFont_GBK16(uint16_t x, uint16_t y, uint16_t fc, uint16_t bc,
uint8_t *s) {
unsigned char i, j;
unsigned short k, x0;
x0 = x;
while (*s) {
if ((*s) < 128) {
k = *s;
if (k == 13) {
x = x0;
y += 16;
} else {
if (k > 32)
k -= 32;
else
k = 0;
for (i = 0; i < 16; i++)
for (j = 0; j < 8; j++) {
if (asc16[k * 16 + i] & (0x80 >> j))
Gui_DrawPoint(x + j, y + i, fc);
else {
if (fc != bc)
Gui_DrawPoint(x + j, y + i, bc);
}
}
x += 8;
}
s++;
}
else {
for (k = 0; k < hz16_num; k++) {
if ((hz16[k].Index[0] == *(s))
&& (hz16[k].Index[1] == *(s + 1))) {
for (i = 0; i < 16; i++) {
for (j = 0; j < 8; j++) {
if (hz16[k].Msk[i * 2] & (0x80 >> j))
Gui_DrawPoint(x + j, y + i, fc);
else {
if (fc != bc)
Gui_DrawPoint(x + j, y + i, bc);
}
}
for (j = 0; j < 8; j++) {
if (hz16[k].Msk[i * 2 + 1] & (0x80 >> j))
Gui_DrawPoint(x + j + 8, y + i, fc);
else {
if (fc != bc)
Gui_DrawPoint(x + j + 8, y + i, bc);
}
}
}
}
}
s += 2;
x += 16;
}
}
}
void Gui_DrawFont_GBK24(uint16_t x, uint16_t y, uint16_t fc, uint16_t bc,
uint8_t *s) {
unsigned char i, j;
unsigned short k;
while (*s) {
if (*s < 0x80) {
k = *s;
if (k > 32)
k -= 32;
else
k = 0;
for (i = 0; i < 16; i++)
for (j = 0; j < 8; j++) {
if (asc16[k * 16 + i] & (0x80 >> j))
Gui_DrawPoint(x + j, y + i, fc);
else {
if (fc != bc)
Gui_DrawPoint(x + j, y + i, bc);
}
}
s++;
x += 8;
} else {
for (k = 0; k < hz24_num; k++) {
if ((hz24[k].Index[0] == *(s))
&& (hz24[k].Index[1] == *(s + 1))) {
for (i = 0; i < 24; i++) {
for (j = 0; j < 8; j++) {
if (hz24[k].Msk[i * 3] & (0x80 >> j))
Gui_DrawPoint(x + j, y + i, fc);
else {
if (fc != bc)
Gui_DrawPoint(x + j, y + i, bc);
}
}
for (j = 0; j < 8; j++) {
if (hz24[k].Msk[i * 3 + 1] & (0x80 >> j))
Gui_DrawPoint(x + j + 8, y + i, fc);
else {
if (fc != bc)
Gui_DrawPoint(x + j + 8, y + i, bc);
}
}
for (j = 0; j < 8; j++) {
if (hz24[k].Msk[i * 3 + 2] & (0x80 >> j))
Gui_DrawPoint(x + j + 16, y + i, fc);
else {
if (fc != bc)
Gui_DrawPoint(x + j + 16, y + i, bc);
}
}
}
}
}
s += 2;
x += 24;
}
}
}
void Gui_DrawFont_Num32(uint16_t x, uint16_t y, uint16_t fc, uint16_t bc,
uint16_t num) {
unsigned char i, j, k, c;
//lcd_text_any(x+94+i*42,y+34,32,32,0x7E8,0x0,sz32,knum[i]);
// w=w/8;
for (i = 0; i < 32; i++) {
for (j = 0; j < 4; j++) {
c = *(sz32 + num * 32 * 4 + i * 4 + j);
for (k = 0; k < 8; k++) {
if (c & (0x80 >> k))
Gui_DrawPoint(x + j * 8 + k, y + i, fc);
else {
if (fc != bc)
Gui_DrawPoint(x + j * 8 + k, y + i, bc);
}
}
}
}
}
// 行号
uint32_t lineno = 0;
uint8_t rows[10][16];
void lcd_println(uint8_t *str) {
uint8_t i = 0;
Gui_DrawFont_GBK16(0, 16 * lineno, WHITE, BLACK, str);
lineno = (lineno + 1) % 10;
Gui_DrawFont_GBK16(0, 16 * lineno, WHITE, BLACK, " ");
}
void lcd_print(uint8_t *str) {
uint8_t i = 0;
Gui_DrawFont_GBK16(0, 16 * lineno, WHITE, BLACK, str);
}
// 如果你的模块需要偏移(某些模块有偏移量)
static const st7735_orientation_t orientation_table_with_offset[] = {
// 0度
{
.madctl = ST7735_MADCTL_MX | ST7735_MADCTL_MY | ST7735_MADCTL_RGB,
.width = SCREEN_WIDTH,
.height = SCREEN_HEIGH,
.x_start = 0, // 可能需要调整为 0, 40 等
.y_start = 0
},
// 90度
{
.madctl = ST7735_MADCTL_MY | ST7735_MADCTL_MV | ST7735_MADCTL_RGB,
.width = SCREEN_HEIGH,
.height = SCREEN_WIDTH,
.x_start = 0,
.y_start = 0 // 可能需要调整为 40
},
// 180度
{
.madctl = ST7735_MADCTL_RGB,
.width = SCREEN_WIDTH,
.height = SCREEN_HEIGH,
.x_start = 0,
.y_start = 0
},
// 270度
{
.madctl = ST7735_MADCTL_MX | ST7735_MADCTL_MV | ST7735_MADCTL_RGB,
.width = SCREEN_HEIGH,
.height = SCREEN_WIDTH,
.x_start = 0,
.y_start = 0
}
};
/**
* @brief 设置显示方向
* @param rotation 方向:0, 90, 180, 270度
*/
void Set_Rotation(st7735_rotation_t rotation) {
if (rotation > 3) {
rotation = 0;
}
current_rotation = rotation;
// 获取当前方向配置
const st7735_orientation_t *orient = &orientation_table[rotation];
// 设置MADCTL寄存器
Lcd_WriteCmd(0x36); // MADCTL命令
Lcd_WriteData(orient->madctl);
// 设置列地址(CASET)
Lcd_WriteCmd(0x2A); // CASET命令
uint8_t caset_data[4] = {
(orient->x_start >> 8) & 0xFF,
orient->x_start & 0xFF,
((orient->x_start + orient->width - 1) >> 8) & 0xFF,
(orient->x_start + orient->width - 1) & 0xFF
};
Lcd_WriteData(caset_data[0]);
Lcd_WriteData(caset_data[1]);
Lcd_WriteData(caset_data[2]);
Lcd_WriteData(caset_data[3]);
// 设置行地址(RASET)
Lcd_WriteCmd(0x2B); // RASET命令
uint8_t raset_data[4] = {
(orient->y_start >> 8) & 0xFF,
orient->y_start & 0xFF,
((orient->y_start + orient->height - 1) >> 8) & 0xFF,
(orient->y_start + orient->height - 1) & 0xFF
};
Lcd_WriteData(raset_data[0]);
Lcd_WriteData(raset_data[1]);
Lcd_WriteData(raset_data[2]);
Lcd_WriteData(raset_data[3]);
}
/**
* @brief 获取当前宽度
*/
uint16_t Get_Width(void) {
return orientation_table[current_rotation].width;
}
/**
* @brief 获取当前高度
*/
uint16_t Get_Height(void){
return orientation_table[current_rotation].height;
}
/**
* @brief 获取当前旋转角度
*/
st7735_rotation_t Get_Rotation(void) {
return current_rotation;
}
2.3.3主程序部分(gpio_led_output.c):
#include "board.h"
#include "fsl_debug_console.h"
#include "fsl_gpio.h"
#include "app.h"
#include <stdio.h>
#include "Lcd_Driver.h"
/* SysTick延时相关 */
volatile uint32_t g_systickCounter = 1U;
const uint32_t g_LpadcFullRange = 65536U;
const uint32_t g_LpadcResultShift = 0U;
volatile bool g_LpadcConversionCompletedFlag = false; // ADC转换完成标志(中断方式)
volatile uint32_t g_adcval = 0;
volatile uint32_t g_mapAdcVal = 0;
int g_stepDitection = 1; // 步进电机的方向,1:顺时针;-1:逆时针
uint32_t g_maxAdcMapVal = 0; // 步进电机转动中测得的ADC最大值
uint32_t g_maxAdcMapValStep = 0; // 步进电机转动中测得的ADC最大值时走掉的步数
uint32_t g_stepcount = 0; // 步进步数
uint8_t g_searchMode = 0; // 1:寻找最亮位置时的模式,0:普通模式,与寻找无关
uint32_t map(uint32_t x, uint32_t in_min, uint32_t in_max, uint32_t out_min, uint32_t out_max) {
// 检查除零
if ((in_max - in_min) == 0) {
return -1; // 或者返回某个默认值
}
// 使用double提高精度
double dividend = (double)(out_max - out_min);
double divisor = (double)(in_max - in_min);
double delta = (double)(x - in_min);
delta = delta<0?0:delta;
uint32_t result = (uint32_t)((delta * dividend) / divisor + out_min);
result = result>100?100:result;
return result;
}
/* 初始化SysTick定时器 */
void SysTick_Init(void) {
/* 设置SysTick重载值,产生1ms中断 */
if (SysTick_Config(SystemCoreClock / 1000U)) {
while (1); /* 初始化失败 */
}
/* 设置SysTick中断优先级(可选) */
NVIC_SetPriority(SysTick_IRQn, 3U);
}
// 1mS定时中断
void SysTick_Handler(void) {
if (g_systickCounter != 0U) {
g_systickCounter--;
}
}
void delay_ms(uint32_t ms) {
g_systickCounter = ms;
while (g_systickCounter != 0U) {
}
}
/* 微秒级延时函数(使用循环计数) */
void delay_us(uint32_t us) {
volatile uint32_t i = 0;
for (i = 0; i < 4800*us; ++i) {
__asm("NOP");
}
}
void delay(void) {
volatile uint32_t i = 0;
for (i = 0; i < 4800000; ++i) {
__asm("NOP");
/* delay */
}
}
/*!
* @brief Main function
*/
int main(void) {
uint8_t buffer[32]={0};
/* Define the init structure for the output LED pin*/
gpio_pin_config_t led_config = {
kGPIO_DigitalOutput,
0,
};
/* Board pin, clock, debug console init */
BOARD_InitHardware();
/* Init output LED GPIO. */
GPIO_PinInit(BOARD_LED_GPIO, BOARD_LED_GPIO_PIN, &led_config);
PRINTF("\r\n Start main ... \r\n");
/* 初始化SysTick定时器 */
PRINTF("\r\n Start SysTick ... \r\n");
SysTick_Init();
//================================ADC Begin===================================
PRINTF("ADC init\r\n");
LPADC_GetDefaultConfig(&mLpadcConfigStruct);
/* Set to highest power level here, users need to properly match ADC clock and power level according
* to application requirements. For specific correspondence, please refer to the data sheet. */
mLpadcConfigStruct.powerLevelMode = kLPADC_PowerLevelAlt4;
mLpadcConfigStruct.enableAnalogPreliminary = true;
mLpadcConfigStruct.referenceVoltageSource = DEMO_LPADC_VREF_SOURCE;
mLpadcConfigStruct.conversionAverageMode = kLPADC_ConversionAverage128;
LPADC_Init(DEMO_LPADC_BASE, &mLpadcConfigStruct);
/* Request LPADC calibration. */
LPADC_DoOffsetCalibration(DEMO_LPADC_BASE); /* Request offset calibration, automatic update OFSTRIM register. */
/* Request auto calibration (including gain error calibration and linearity error calibration). */
LPADC_DoAutoCalibration(DEMO_LPADC_BASE);
/* Set conversion CMD configuration. */
LPADC_GetDefaultConvCommandConfig(&mLpadcCommandConfigStruct);
mLpadcCommandConfigStruct.channelNumber = DEMO_LPADC_USER_CHANNEL;
mLpadcCommandConfigStruct.conversionResolutionMode = kLPADC_ConversionResolutionHigh;
LPADC_SetConvCommandConfig(DEMO_LPADC_BASE, DEMO_LPADC_USER_CMDID, &mLpadcCommandConfigStruct);
/* Set trigger configuration. */
LPADC_GetDefaultConvTriggerConfig(&mLpadcTriggerConfigStruct);
mLpadcTriggerConfigStruct.targetCommandId = DEMO_LPADC_USER_CMDID;
mLpadcTriggerConfigStruct.enableHardwareTrigger = false;
LPADC_SetConvTriggerConfig(DEMO_LPADC_BASE, 0U, &mLpadcTriggerConfigStruct); /* Configurate the trigger0. */
PRINTF("ADC Full Range: %d\r\n", g_LpadcFullRange);
//================================ADC End===================================
//================================TFT Begin=================================
PRINTF("\r\n init tft ... \r\n");
Lcd_Init();
// 清屏
Lcd_Clear(BLACK);
//================================TFT End===================================
Gui_DrawFont_GBK16(0,0,WHITE,BLACK, " EETREE ");
Gui_DrawFont_GBK16(0,20,WHITE,BLACK," DigiKey ");
Gui_DrawFont_GBK16(0,40,WHITE,BLACK,"================");
while (1) {
GPIO_PortToggle(BOARD_LED_GPIO, 1u << BOARD_LED_GPIO_PIN);
// 触发ADC
LPADC_DoSoftwareTrigger(DEMO_LPADC_BASE, 1U); /* 1U is trigger0 mask. */
// 等待ADC转换完成
while (!LPADC_GetConvResult(DEMO_LPADC_BASE, &mLpadcResultConfigStruct)) {
}
g_adcval = ((mLpadcResultConfigStruct.convValue) >> g_LpadcResultShift);
PRINTF("ADC value: %d\r\n", g_adcval);
sprintf(buffer, "ADC: %d ", g_adcval);
Gui_DrawFont_GBK16(0, 60, WHITE, BLACK, buffer);
v = (int)( 3.3 * (double)g_adcval/65536 *100);
sprintf(buffer, "VAL: %d.%d ", v/100, v%100);
Gui_DrawFont_GBK16(0, 80, WHITE, BLACK, buffer);
delay_ms(500);
}
}
装置的实际图片以及运行后的效果:
三、功能展示
<iframe src="//player.bilibili.com/player.html?isOutside=true&aid=116225204099218&bvid=BV1mowszMEjc&cid=36684039074&p=1" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"></iframe>
四、总结
遇到的问题
格式化处理ADC转换为电压值的时候,遇到个问题。对浮点数使用sprintf转换为字符串的时候,结果字符串中数据部分总是丢失,显示屏上显示为空白。通过断点调试追踪,结果确实没有处理到字符串中。不得将数据的整数部分和小数部分分别处理,按照整数方式显示了。
心得体会
使用ADC外设,是参考例程处理的,但相关的配置,还有很多细节不明白。需要后续再花时间深入学习。

 qqlovolpp
qqlovolpp aramy
aramy 枫雪天
枫雪天