内容介绍
内容介绍
项目概述
本项目使用 Zephyr RTOS 在 NXP FRDM-MCXA346 开发板上完成 DigiKey Funpack 5-1 的两个任务要求。
硬件平台
- 开发板: NXP FRDM-MCXA346
- 处理器: MCXA346 (ARM Cortex-M33, 180MHz)
- 内存: 240KB SRAM, 1MB Flash
- 串口: LPUART2 (115200 baud)
软件平台
- RTOS: Zephyr Project
- 工具链: Zephyr SDK / GCC ARM Embedded
任务1:基础任务 - UART 串口输出
任务要求
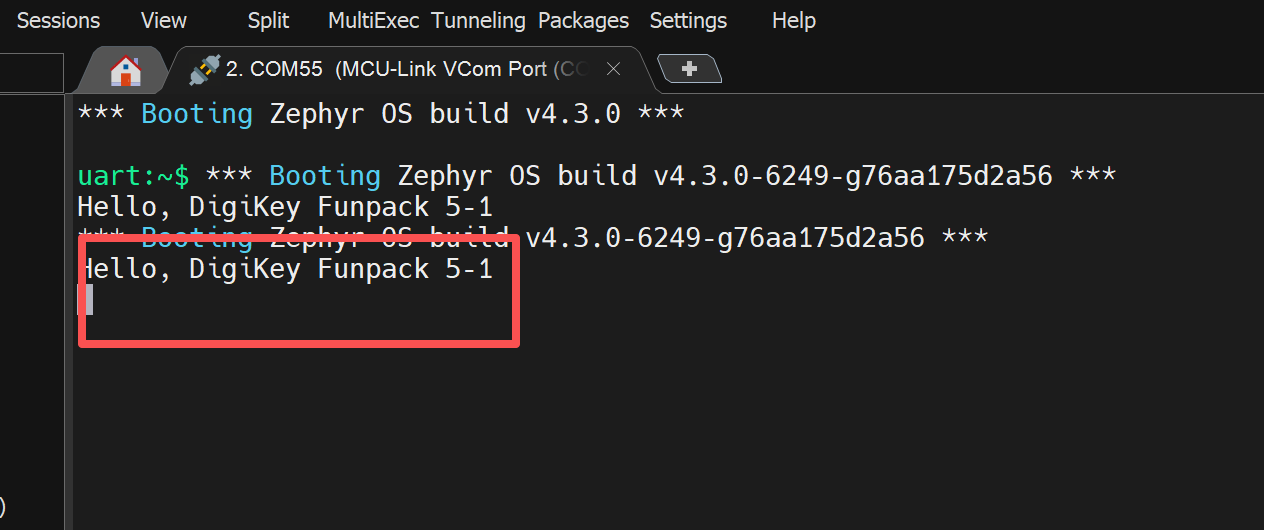
使用 MCXA346 开发板的 UART 串口输出 "Hello, DigiKey Funpack 5-1"
实现方案
1. 项目结构
digikey_funpack/
└── hello/
├── CMakeLists.txt
├── prj.conf
└── src/
└── main.c
2. 配置文件 (prj.conf)
CONFIG_CONSOLE=y
CONFIG_UART_CONSOLE=y
CONFIG_SERIAL=y
CONFIG_PRINTK=y
3. 源代码 (main.c)
#include <zephyr/kernel.h>
#include <zephyr/sys/printk.h>
int main(void)
{
printk("Hello, DigiKey Funpack 5-1\n");
return 0;
}
运行方法
# 进入 Zephyr 环境
cd zephyrproject
# 设置环境变量
source zephyr/zephyr-env.sh
# 构建项目
cd digikey_funpack/hello
west build -b frdm_mcxa346
烧录并运行
使用LinkFlash进行下载:
预期输出
任务2:进阶任务 - 带缓冲区的 Shell
任务要求
实现一个带缓冲区的 shell,核心功能包括:
1. 命令提示符显示 (`ysh > $`)
2. 循环接收用户输入
3. 输入缓冲区管理
4. 命令解析与执行
5. 控制板载 LED 的颜色和亮度
实现方案
1. 项目结构
digikey_funpack/
└── shell/
├── CMakeLists.txt
├── prj.conf
└── src/
└── main.c
2. 核心功能实现
2.1 代码实现
#include <zephyr/kernel.h>
#include <zephyr/device.h>
#include <zephyr/drivers/gpio.h>
#include <zephyr/sys/printk.h>
#include <zephyr/sys/util.h>
#include <zephyr/console/console.h>
#include <string.h>
#include <stdlib.h>
/* Input buffer configuration */
#define INPUT_BUFFER_SIZE 128
#define MAX_ARGS 16
/* Shell prompt */
#define SHELL_PROMPT "ysh > $ "
/* LED GPIO specifications */
#define LED_RED_NODE DT_ALIAS(led0)
#define LED_GREEN_NODE DT_ALIAS(led1)
#define LED_BLUE_NODE DT_ALIAS(led2)
static const struct gpio_dt_spec led_red = GPIO_DT_SPEC_GET(LED_RED_NODE, gpios);
static const struct gpio_dt_spec led_green = GPIO_DT_SPEC_GET(LED_GREEN_NODE, gpios);
static const struct gpio_dt_spec led_blue = GPIO_DT_SPEC_GET(LED_BLUE_NODE, gpios);
/* Input buffer */
static char input_buffer[INPUT_BUFFER_SIZE];
static int buffer_pos = 0;
/* LED state - brightness 0-100 */
static uint8_t red_brightness = 0;
static uint8_t green_brightness = 0;
static uint8_t blue_brightness = 0;
/* Software PWM state */
static struct k_timer pwm_timer;
static uint8_t pwm_counter = 0;
static volatile uint8_t pwm_period = 100; /* PWM period */
/* Software PWM callback - runs every 0.1ms (10kHz PWM frequency) */
static void pwm_callback(struct k_timer *timer)
{
ARG_UNUSED(timer);
pwm_counter++;
if (pwm_counter >= pwm_period) {
pwm_counter = 0;
}
/* 根据测试结果修正:brightness=0 全亮,brightness=100 全灭 */
/* 所以 GPIO 逻辑需要反过来 */
/* Red LED */
if (red_brightness == 0) {
gpio_pin_set_dt(&led_red, 0); /* On (全亮) */
} else if (red_brightness >= 100) {
gpio_pin_set_dt(&led_red, 1); /* Off (全灭) */
} else {
gpio_pin_set_dt(&led_red, pwm_counter < red_brightness ? 1 : 0);
}
/* Green LED */
if (green_brightness == 0) {
gpio_pin_set_dt(&led_green, 0); /* On */
} else if (green_brightness >= 100) {
gpio_pin_set_dt(&led_green, 1); /* Off */
} else {
gpio_pin_set_dt(&led_green, pwm_counter < green_brightness ? 1 : 0);
}
/* Blue LED */
if (blue_brightness == 0) {
gpio_pin_set_dt(&led_blue, 0); /* On */
} else if (blue_brightness >= 100) {
gpio_pin_set_dt(&led_blue, 1); /* Off */
} else {
gpio_pin_set_dt(&led_blue, pwm_counter < blue_brightness ? 1 : 0);
}
}
/* LED control command */
static void cmd_led(int argc, char **argv);
/* Forward declaration */
static void print_prompt(void);
/* Available commands for tab completion */
static const char *commands[] = {
"help",
"led",
"rgb",
"clear",
"info",
"reboot"
};
#define NUM_COMMANDS (sizeof(commands) / sizeof(commands[0]))
/* Tab completion function */
static void tab_complete(void)
{
int matches = 0;
int i;
const char *match = NULL;
/* Find matches */
for (i = 0; i < NUM_COMMANDS; i++) {
if (strncmp(input_buffer, commands[i], buffer_pos) == 0) {
match = commands[i];
matches++;
}
}
if (matches == 1 && match != NULL) {
/* Complete the command */
printk("\n%s", match);
strcpy(input_buffer, match);
buffer_pos = strlen(match);
} else if (matches > 1) {
/* Show all matches */
printk("\n");
for (i = 0; i < NUM_COMMANDS; i++) {
if (strncmp(input_buffer, commands[i], buffer_pos) == 0) {
printk("%s ", commands[i]);
}
}
printk("\n");
print_prompt();
printk("%s", input_buffer);
}
}
/* Simple token parser - compatible with Zephyr */
static char *my_strtok(char *str, const char *delim)
{
static char *next_token = NULL;
char *token;
if (str != NULL) {
next_token = str;
}
if (next_token == NULL) {
return NULL;
}
/* Skip leading delimiters */
while (*next_token != '\0') {
const char *d = delim;
while (*d != '\0') {
if (*next_token == *d) {
next_token++;
break;
}
d++;
}
if (*d == '\0') {
break; /* Not a delimiter */
}
}
if (*next_token == '\0') {
next_token = NULL;
return NULL;
}
token = next_token;
/* Find end of token */
while (*next_token != '\0') {
const char *d = delim;
while (*d != '\0') {
if (*next_token == *d) {
*next_token = '\0';
next_token++;
return token;
}
d++;
}
next_token++;
}
next_token = NULL;
return token;
}
/* Parse input buffer into arguments */
static int parse_command(char *buffer, char **argv, int max_args)
{
int argc = 0;
char *token;
/* Skip leading spaces */
while (*buffer == ' ') {
buffer++;
}
/* Parse tokens */
token = my_strtok(buffer, " \t\r\n");
while (token != NULL && argc < max_args) {
argv[argc++] = token;
token = my_strtok(NULL, " \t\r\n");
}
return argc;
}
/* Print help message */
static void print_help(void)
{
printk("Available commands:\n");
printk(" help - Show this help message\n");
printk(" led <color> - Turn LED on/off (red, green, blue, all)\n");
printk(" led <color> <0-100> - Set LED brightness (0-100)\n");
printk(" rgb <r> <g> <b> - Set RGB LED values (0-100 each)\n");
printk(" clear - Clear screen\n");
printk(" info - Show board information\n");
printk(" reboot - Reboot the board\n");
}
/* LED control command */
static void cmd_led(int argc, char **argv)
{
if (argc < 2) {
printk("Usage: led <color> [0-100]\n");
printk(" colors: red, green, blue, all\n");
return;
}
const char *color = argv[1];
if (argc == 2) {
/* Toggle LED */
if (strcmp(color, "red") == 0) {
red_brightness = red_brightness ? 0 : 100;
} else if (strcmp(color, "green") == 0) {
green_brightness = green_brightness ? 0 : 100;
} else if (strcmp(color, "blue") == 0) {
blue_brightness = blue_brightness ? 0 : 100;
} else if (strcmp(color, "all") == 0) {
red_brightness = red_brightness ? 0 : 100;
green_brightness = green_brightness ? 0 : 100;
blue_brightness = blue_brightness ? 0 : 100;
} else {
printk("Unknown color. Use: red, green, blue, all\n");
return;
}
} else {
/* Set brightness */
int value = atoi(argv[2]);
if (value < 0 || value > 100) {
printk("Brightness must be 0-100\n");
return;
}
if (strcmp(color, "red") == 0) {
red_brightness = value;
} else if (strcmp(color, "green") == 0) {
green_brightness = value;
} else if (strcmp(color, "blue") == 0) {
blue_brightness = value;
} else if (strcmp(color, "all") == 0) {
red_brightness = value;
green_brightness = value;
blue_brightness = value;
} else {
printk("Unknown color. Use: red, green, blue, all\n");
return;
}
}
/* LED is active low, so setting GPIO to 0 turns LED on */
gpio_pin_set_dt(&led_red, red_brightness > 0 ? 1 : 0);
gpio_pin_set_dt(&led_green, green_brightness > 0 ? 1 : 0);
gpio_pin_set_dt(&led_blue, blue_brightness > 0 ? 1 : 0);
printk("LED: R=%d%% G=%d%% B=%d%%\n", red_brightness, green_brightness, blue_brightness);
}
/* RGB command - set all three LEDs at once */
static void cmd_rgb(int argc, char **argv)
{
if (argc < 4) {
printk("Usage: rgb <red> <green> <blue>\n");
printk(" Each value: 0-100\n");
return;
}
int r = atoi(argv[1]);
int g = atoi(argv[2]);
int b = atoi(argv[3]);
if (r < 0 || r > 100 || g < 0 || g > 100 || b < 0 || b > 100) {
printk("All values must be 0-100\n");
return;
}
red_brightness = r;
green_brightness = g;
blue_brightness = b;
/* LED is active low, so setting GPIO to 0 turns LED on */
gpio_pin_set_dt(&led_red, red_brightness > 0 ? 1 : 0);
gpio_pin_set_dt(&led_green, green_brightness > 0 ? 1 : 0);
gpio_pin_set_dt(&led_blue, blue_brightness > 0 ? 1 : 0);
printk("RGB: R=%d%% G=%d%% B=%d%%\n", r, g, b);
}
/* Info command */
static void cmd_info(void)
{
printk("========================================\n");
printk(" DigiKey Funpack 5-1 - Shell Demo\n");
printk(" Board: NXP FRDM-MCXA346\n");
printk(" Zephyr RTOS\n");
printk("========================================\n");
printk("LED Status: R=%d%% G=%d%% B=%d%%\n",
red_brightness, green_brightness, blue_brightness);
}
/* Clear screen command */
static void cmd_clear(void)
{
/* ANSI escape code to clear screen */
printk("\033[2J\033[H");
}
/* Process command */
static void process_command(char *buffer)
{
char *argv[MAX_ARGS];
int argc;
/* Skip empty lines */
if (buffer[0] == '\0' || buffer[0] == '\n') {
return;
}
/* Parse command */
argc = parse_command(buffer, argv, MAX_ARGS);
if (argc == 0) {
return;
}
/* Execute command */
if (strcmp(argv[0], "help") == 0) {
print_help();
} else if (strcmp(argv[0], "led") == 0) {
cmd_led(argc, argv);
} else if (strcmp(argv[0], "rgb") == 0) {
cmd_rgb(argc, argv);
} else if (strcmp(argv[0], "clear") == 0) {
cmd_clear();
} else if (strcmp(argv[0], "info") == 0) {
cmd_info();
} else if (strcmp(argv[0], "reboot") == 0) {
printk("Reboot command not available\n");
} else {
printk("Unknown command: %s\n", argv[0]);
printk("Type 'help' for available commands.\n");
}
}
/* Print prompt */
static void print_prompt(void)
{
printk("%s", SHELL_PROMPT);
}
/* UART device */
int main(void)
{
uint8_t c;
printk("Initializing DigiKey Funpack 5-1 Shell...\n");
/* Initialize console */
console_init();
printk("Console initialized\n");
/* Initialize LEDs */
if (device_is_ready(led_red.port)) {
gpio_pin_configure_dt(&led_red, GPIO_OUTPUT);
gpio_pin_set_dt(&led_red, 1); /* Off (active low) */
printk("Red LED initialized\n");
}
if (device_is_ready(led_green.port)) {
gpio_pin_configure_dt(&led_green, GPIO_OUTPUT);
gpio_pin_set_dt(&led_green, 1); /* Off (active low) */
printk("Green LED initialized\n");
}
if (device_is_ready(led_blue.port)) {
gpio_pin_configure_dt(&led_blue, GPIO_OUTPUT);
gpio_pin_set_dt(&led_blue, 1); /* Off (active low) */
printk("Blue LED initialized\n");
}
/* Initialize and start software PWM timer - 0.1ms period (10kHz) */
k_timer_init(&pwm_timer, pwm_callback, NULL);
k_timer_start(&pwm_timer, K_USEC(100), K_USEC(100));
printk("Software PWM started (10kHz)\n");
/* Initialize buffer */
buffer_pos = 0;
memset(input_buffer, 0, sizeof(input_buffer));
/* Welcome message */
printk("\n");
printk("========================================\n");
printk(" DigiKey Funpack 5-1 - Shell Demo\n");
printk(" Board: NXP FRDM-MCXA346\n");
printk(" Zephyr RTOS\n");
printk("========================================\n");
printk("Type 'help' for available commands.\n");
printk("\n");
/* Print prompt */
print_prompt();
/* Main loop - read characters from console */
while (1) {
/* Read character from console (blocking) */
/* Read character from UART (polling) */
/* Read character from console (blocking) */
c = console_getchar();
if (c < 0) {
k_yield();
continue;
}
/* Handle character */
switch (c) {
case '\r':
case '\n':
/* Enter key - process command */
printk("\r\n");
if (buffer_pos > 0) {
input_buffer[buffer_pos] = '\0';
process_command(input_buffer);
buffer_pos = 0;
memset(input_buffer, 0, sizeof(input_buffer));
}
print_prompt();
break;
case '\b':
case 0x7F:
/* Backspace / Delete - delete character */
if (buffer_pos > 0) {
buffer_pos--;
printk("\b \b"); /* Erase character */
}
break;
case '\t':
/* Tab - auto-complete */
tab_complete();
break;
default:
/* Regular character - add to buffer */
if (buffer_pos < (INPUT_BUFFER_SIZE - 1) && c >= 0x20 && c <= 0x7E) {
input_buffer[buffer_pos++] = c;
printk("%c", c); /* Echo */
}
break;
}
k_yield();
}
return 0;
}
缓冲区管理包括:
- 字符接收与存储
- 退格键处理 (删除字符)
- 回车键处理 (执行命令)
- 特殊字符过滤 (仅接受可打印 ASCII 字符)
2.2 命令解析
使用自定义的 `my_strtok` 函数进行命令行解析,支持:
- 空格和tab 作为分隔符
- 最多16个参数
2.3 LED控制
板载RGB LED GPIO 定义:
- 红色 LED:GPIO3_18
- 绿色 LED:GPIO3_19
- 绿色 LED:GPIO3_21
2.4 支持的命令

3. 源代码 (main.c)
主要函数:
- my_strtok() - 命令行解析
- parse_command() - 参数解析
- process_command() - 命令处理分发
- cmd_led() - LED 控制命令
- cmd_rgb() - RGB 同时控制
- cmd_info() - 显示信息
- cmd_clear() - 清屏
- print_help() - 帮助信息
运行方法
# 构建项目
cd digikey_funpack/shell
west build -b frdm_mcxa346
烧录
交互示例:
ysh > $ rgb 50 50 50
RGB: R=50% G=50% B=50% led灯50%的亮度
ysh > $ rgb 100 100 100
RGB: R=100% G=100% B=100% led灯1000%的亮度
ysh > $ rgb 0 0 0
RGB: R=0% G=0% B=0% led灯全灭
ysh > $ led blue
LED: R=0% G=0% B=100% 打开蓝灯
ysh > $ led blue
LED: R=0% G=0% B=0% 关闭蓝灯
ysh > $ led red
LED: R=100% G=0% B=0% 打开红灯
ysh > $
附件下载

hello.zip
输出Hello, DigiKey Funpack 5-1
shell.zip
shell控制台使用命令控件帽LED
团队介绍
本人为个人创客爱好者
评论
0 / 100
查看更多
猜你喜欢
Funpack5-1 - 基于FRDM-MCXA346实现shell控制RGB LED该项目使用了FRDM-MCXA346开发板,实现了shell控制板载RGB灯的设计,它的主要功能为:串口输入内容处理,PWM控制RGB灯。
134
Funpack5-1 - 基于NXP FRDM-MCXA346实现RGB LED Shell控制该项目使用了FRDM-MCXA346,实现了RGB LED Shell控制的设计,它的主要功能为:NXP FRDM-MCXA346实现RGB LED Shell控制。
121
Funpack5-1 - 基于FRDM-MCXA346实现串口Shell控制板载RGB该项目使用了FRDM-MCXA346,实现了Shell控制板载RGB LED的设计,它的主要功能为:实现一个带缓冲区的shell,核心是实现一个带缓冲区的shell,程序需能显示命令提示符,并循环接收用户输入,并能进行基本的命令解析。例如:实现简单的指令控制板载的LED的颜色和亮度。。
 EPTmachine
EPTmachine88
