任务介绍
本项目实现了Funpack4-3 板卡二的任务2,使用TMC4361A+TMC2160控制方案,基于CrowPanel ESP32 4.3英寸HMI开发板与ESP32 XIAO开发板,构建了完整的步进电机控制系统。系统采用BLE GATT无线通信协议,实现上位机(CrowPanel HMI)与下位机(XIAO)的实时指令传输,实现对步进电机的速度与位置精确控制。
硬件平台
任务板卡
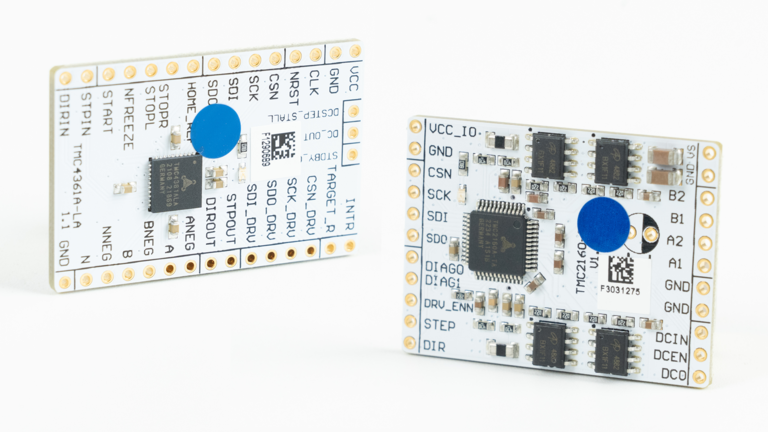
首先介绍本次用到的板卡:TMC4361A-BOB & TMC2160-BOB 评估套件。
顾名思义,TMC4361A-BOB & TMC2160-BOB 评估套件分别是用来评估TMC4361A和TMC2160芯片的,其中BOB是分线板(Breakout Board)的缩写。其中TMC4361A是步进电机运动控制器,它有两套SPI接口,分别与微控制器和下层驱动器通信,它支持我们通过它“透传”SPI信息给下层驱动器,这样可以简化连接,给微控制器节省一个SPI接口。TMC2160是栅极驱动器,它通过控制外接的四个晶体管来控制电流,最终实现对步进电机的控制。
主控板
为了控制上述的板卡,我们还需要两块开发板:CrowPanel ESP32 Display和ESP32 XIAO。
CrowPanel是一块基于ESP32 S3微控制器的HMI触摸屏开发板,因此它的主体就是一块4.3寸的LCD屏,并且集成了比较丰富的外设接口。
- 上位机设备:CrowPanel ESP32 Display 4.3英寸HMI开发板
- 搭载双核Xtensa® 32位LX6微处理器
- 集成WiFi/蓝牙无线通信模块
- 480x272分辨率RGB显示屏
- 电容式触摸屏交互界面
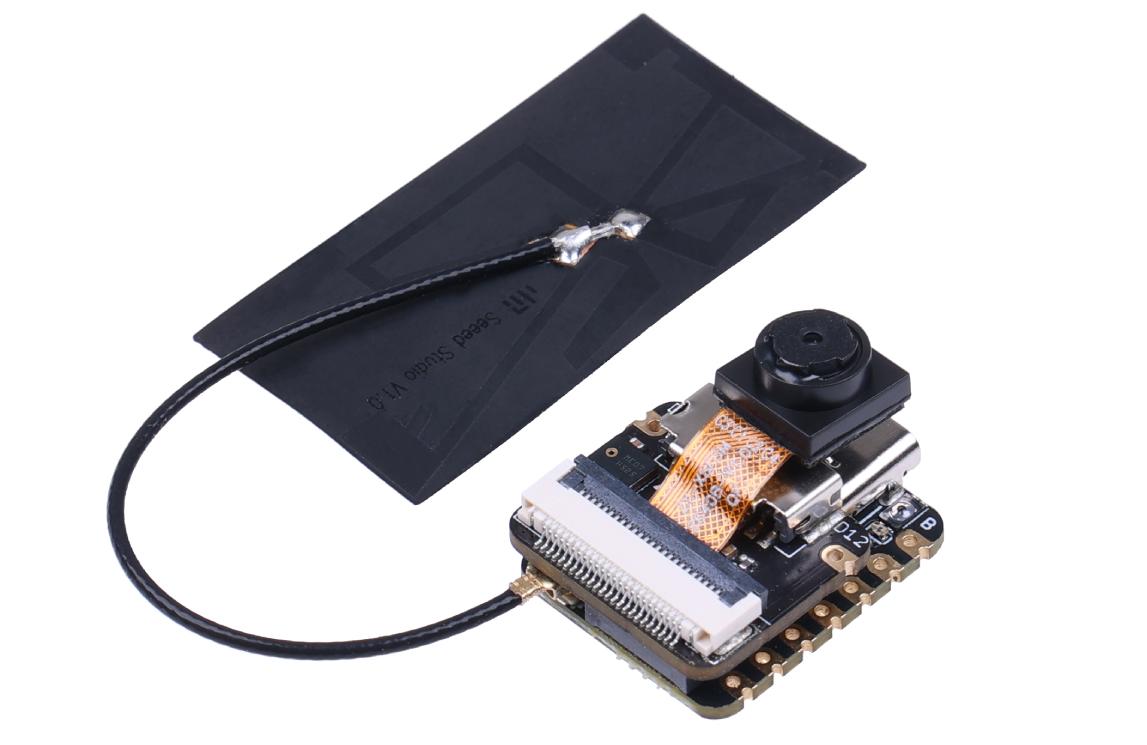
ESP32 XIAO同样是一块基于ESP32 S3微控制器的开发板,它的规格非常小巧,但麻雀虽小,五脏俱全。强劲的ESP32 S3核心以及外接的引脚足以支撑本次任务。
- 下位机设备:ESP32 XIAO开发板
- 用于驱动TMC4361A+TMC2160步进电机控制芯片
- 控制步进电机的运动参数
- 执行上位机发送的控制指令
任务分析与实现
这次我选择了任务二来实现。
方案框图:
%22%3E%3Cpath%20d%3D%22M610%2C259.6094%20L747%2C259.6094%20A3.75%2C3.75%200%200%201%20749.5%2C262.1094%20L756.5%2C277.25%20L917%2C277.25%20A2.5%2C2.5%200%200%201%20919.5%2C279.75%20L919.5%2C460.1094%20A2.5%2C2.5%200%200%201%20917%2C462.6094%20L610%2C462.6094%20A2.5%2C2.5%200%200%201%20607.5%2C460.1094%20L607.5%2C262.1094%20A2.5%2C2.5%200%200%201%20610%2C259.6094%20%22%20fill%3D%22%23FFE0B2%22%20style%3D%22stroke%3A%237B1FA2%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cline%20style%3D%22stroke%3A%237B1FA2%3Bstroke-width%3A1.0%3B%22%20x1%3D%22607.5%22%20x2%3D%22756.5%22%20y1%3D%22277.25%22%20y2%3D%22277.25%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22Verdana%22%20font-size%3D%2210%22%20font-weight%3D%22bold%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%22136%22%20x%3D%22611.5%22%20y%3D%22270.8916%22%3ECROWPANEL%20HMI%20(%26%2319978%3B%26%2320301%3B%26%2326426%3B)%3C%2Ftext%3E%3C%2Fg%3E%3Cg%20id%3D%22cluster_ESP32%20XIAO%20(%26%2319979%3B%26%2320301%3B%26%2326426%3B)%22%3E%3Cpath%20d%3D%22M777%2C622.6094%20L886%2C622.6094%20A3.75%2C3.75%200%200%201%20888.5%2C625.1094%20L895.5%2C640.25%20L940%2C640.25%20A2.5%2C2.5%200%200%201%20942.5%2C642.75%20L942.5%2C1053.1094%20A2.5%2C2.5%200%200%201%20940%2C1055.6094%20L777%2C1055.6094%20A2.5%2C2.5%200%200%201%20774.5%2C1053.1094%20L774.5%2C625.1094%20A2.5%2C2.5%200%200%201%20777%2C622.6094%20%22%20fill%3D%22%23DCEDC8%22%20style%3D%22stroke%3A%237B1FA2%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cline%20style%3D%22stroke%3A%237B1FA2%3Bstroke-width%3A1.0%3B%22%20x1%3D%22774.5%22%20x2%3D%22895.5%22%20y1%3D%22640.25%22%20y2%3D%22640.25%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22Verdana%22%20font-size%3D%2210%22%20font-weight%3D%22bold%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%22108%22%20x%3D%22778.5%22%20y%3D%22633.8916%22%3EESP32%20XIAO%20(%26%2319979%3B%26%2320301%3B%26%2326426%3B)%3C%2Ftext%3E%3C%2Fg%3E%3Cg%20id%3D%22cluster_%26%2320132%3B%26%2320114%3B%26%2332452%3B%26%2320214%3B%22%3E%3Cpath%20d%3D%22M272%2C126.6094%20L313%2C126.6094%20A3.75%2C3.75%200%200%201%20315.5%2C129.1094%20L322.5%2C144.25%20L1119%2C144.25%20A2.5%2C2.5%200%200%201%201121.5%2C146.75%20L1121.5%2C212.1094%20A2.5%2C2.5%200%200%201%201119%2C214.6094%20L272%2C214.6094%20A2.5%2C2.5%200%200%201%20269.5%2C212.1094%20L269.5%2C129.1094%20A2.5%2C2.5%200%200%201%20272%2C126.6094%20%22%20fill%3D%22%23BBDEFB%22%20style%3D%22stroke%3A%237B1FA2%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cline%20style%3D%22stroke%3A%237B1FA2%3Bstroke-width%3A1.0%3B%22%20x1%3D%22269.5%22%20x2%3D%22322.5%22%20y1%3D%22144.25%22%20y2%3D%22144.25%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22Verdana%22%20font-size%3D%2210%22%20font-weight%3D%22bold%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2240%22%20x%3D%22273.5%22%20y%3D%22137.8916%22%3E%26%2320132%3B%26%2320114%3B%26%2332452%3B%26%2320214%3B%3C%2Ftext%3E%3C%2Fg%3E%3Cg%20id%3D%22elem_lvgl%22%3E%3Crect%20fill%3D%22%23FFF3E0%22%20height%3D%2241.6406%22%20rx%3D%222.5%22%20ry%3D%222.5%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%22113%22%20x%3D%22624%22%20y%3D%22404.6094%22%2F%3E%3Crect%20fill%3D%22%23FFF3E0%22%20height%3D%2210%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%2215%22%20x%3D%22717%22%20y%3D%22409.6094%22%2F%3E%3Crect%20fill%3D%22%23FFF3E0%22%20height%3D%222%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%224%22%20x%3D%22715%22%20y%3D%22411.6094%22%2F%3E%3Crect%20fill%3D%22%23FFF3E0%22%20height%3D%222%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%224%22%20x%3D%22715%22%20y%3D%22415.6094%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22Verdana%22%20font-size%3D%2210%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2273%22%20x%3D%22639%22%20y%3D%22433.8916%22%3ELVGL9%26%2330028%3B%26%2338754%3B%26%2324341%3B%26%2325806%3B%3C%2Ftext%3E%3C%2Fg%3E%3Cg%20id%3D%22elem_ble_client%22%3E%3Crect%20fill%3D%22%23E8F5E8%22%20height%3D%2241.6406%22%20rx%3D%222.5%22%20ry%3D%222.5%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%2290%22%20x%3D%22813.5%22%20y%3D%22404.6094%22%2F%3E%3Crect%20fill%3D%22%23E8F5E8%22%20height%3D%2210%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%2215%22%20x%3D%22883.5%22%20y%3D%22409.6094%22%2F%3E%3Crect%20fill%3D%22%23E8F5E8%22%20height%3D%222%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%224%22%20x%3D%22881.5%22%20y%3D%22411.6094%22%2F%3E%3Crect%20fill%3D%22%23E8F5E8%22%20height%3D%222%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%224%22%20x%3D%22881.5%22%20y%3D%22415.6094%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22Verdana%22%20font-size%3D%2210%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2250%22%20x%3D%22828.5%22%20y%3D%22433.8916%22%3EBLE%26%2323458%3B%26%2325143%3B%26%2331471%3B%3C%2Ftext%3E%3C%2Fg%3E%3Cg%20id%3D%22elem_touch_handler%22%3E%3Crect%20fill%3D%22%23E3F2FD%22%20height%3D%2241.6406%22%20rx%3D%222.5%22%20ry%3D%222.5%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%22100%22%20x%3D%22630.5%22%20y%3D%22289.6094%22%2F%3E%3Crect%20fill%3D%22%23E3F2FD%22%20height%3D%2210%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%2215%22%20x%3D%22710.5%22%20y%3D%22294.6094%22%2F%3E%3Crect%20fill%3D%22%23E3F2FD%22%20height%3D%222%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%224%22%20x%3D%22708.5%22%20y%3D%22296.6094%22%2F%3E%3Crect%20fill%3D%22%23E3F2FD%22%20height%3D%222%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%224%22%20x%3D%22708.5%22%20y%3D%22300.6094%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22Verdana%22%20font-size%3D%2210%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2260%22%20x%3D%22645.5%22%20y%3D%22318.8916%22%3E%26%2335302%3B%26%2325720%3B%26%2320107%3B%26%2320214%3B%26%2322788%3B%26%2329702%3B%3C%2Ftext%3E%3C%2Fg%3E%3Cg%20id%3D%22elem_ble_server%22%3E%3Crect%20fill%3D%22%23E8F5E8%22%20height%3D%2241.6406%22%20rx%3D%222.5%22%20ry%3D%222.5%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%2290%22%20x%3D%22813.5%22%20y%3D%22652.6094%22%2F%3E%3Crect%20fill%3D%22%23E8F5E8%22%20height%3D%2210%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%2215%22%20x%3D%22883.5%22%20y%3D%22657.6094%22%2F%3E%3Crect%20fill%3D%22%23E8F5E8%22%20height%3D%222%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%224%22%20x%3D%22881.5%22%20y%3D%22659.6094%22%2F%3E%3Crect%20fill%3D%22%23E8F5E8%22%20height%3D%222%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%224%22%20x%3D%22881.5%22%20y%3D%22663.6094%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22Verdana%22%20font-size%3D%2210%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2250%22%20x%3D%22828.5%22%20y%3D%22681.8916%22%3EBLE%26%2326381%3B%26%2321153%3B%26%2331471%3B%3C%2Ftext%3E%3C%2Fg%3E%3Cg%20id%3D%22elem_tmc4361%22%3E%3Crect%20fill%3D%22%23F1F8E9%22%20height%3D%2241.6406%22%20rx%3D%222.5%22%20ry%3D%222.5%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%22136%22%20x%3D%22790.5%22%20y%3D%22767.6094%22%2F%3E%3Crect%20fill%3D%22%23F1F8E9%22%20height%3D%2210%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%2215%22%20x%3D%22906.5%22%20y%3D%22772.6094%22%2F%3E%3Crect%20fill%3D%22%23F1F8E9%22%20height%3D%222%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%224%22%20x%3D%22904.5%22%20y%3D%22774.6094%22%2F%3E%3Crect%20fill%3D%22%23F1F8E9%22%20height%3D%222%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%224%22%20x%3D%22904.5%22%20y%3D%22778.6094%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22Verdana%22%20font-size%3D%2210%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2296%22%20x%3D%22805.5%22%20y%3D%22796.8916%22%3ETMC4361%26%2336816%3B%26%2321160%3B%26%2325511%3B%26%2321046%3B%26%2322120%3B%3C%2Ftext%3E%3C%2Fg%3E%3Cg%20id%3D%22elem_tmc2160%22%3E%3Crect%20fill%3D%22%23E8F5E8%22%20height%3D%2241.6406%22%20rx%3D%222.5%22%20ry%3D%222.5%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%22116%22%20x%3D%22800.5%22%20y%3D%22882.6094%22%2F%3E%3Crect%20fill%3D%22%23E8F5E8%22%20height%3D%2210%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%2215%22%20x%3D%22896.5%22%20y%3D%22887.6094%22%2F%3E%3Crect%20fill%3D%22%23E8F5E8%22%20height%3D%222%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%224%22%20x%3D%22894.5%22%20y%3D%22889.6094%22%2F%3E%3Crect%20fill%3D%22%23E8F5E8%22%20height%3D%222%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%224%22%20x%3D%22894.5%22%20y%3D%22893.6094%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22Verdana%22%20font-size%3D%2210%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2276%22%20x%3D%22815.5%22%20y%3D%22911.8916%22%3ETMC2160%26%2339537%3B%26%2321160%3B%26%2322120%3B%3C%2Ftext%3E%3C%2Fg%3E%3Cg%20id%3D%22elem_stepper%22%3E%3Crect%20fill%3D%22%23C8E6C9%22%20height%3D%2241.6406%22%20rx%3D%222.5%22%20ry%3D%222.5%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%2280%22%20x%3D%22818.5%22%20y%3D%22997.6094%22%2F%3E%3Crect%20fill%3D%22%23C8E6C9%22%20height%3D%2210%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%2215%22%20x%3D%22878.5%22%20y%3D%221002.6094%22%2F%3E%3Crect%20fill%3D%22%23C8E6C9%22%20height%3D%222%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%224%22%20x%3D%22876.5%22%20y%3D%221004.6094%22%2F%3E%3Crect%20fill%3D%22%23C8E6C9%22%20height%3D%222%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%224%22%20x%3D%22876.5%22%20y%3D%221008.6094%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22Verdana%22%20font-size%3D%2210%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2240%22%20x%3D%22833.5%22%20y%3D%221026.8916%22%3E%26%2327493%3B%26%2336827%3B%26%2330005%3B%26%2326426%3B%3C%2Ftext%3E%3C%2Fg%3E%3Cg%20id%3D%22elem_touchscreen%22%3E%3Crect%20fill%3D%22%23E1F5FE%22%20height%3D%2241.6406%22%20rx%3D%222.5%22%20ry%3D%222.5%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%2270%22%20x%3D%22420.5%22%20y%3D%22156.6094%22%2F%3E%3Crect%20fill%3D%22%23E1F5FE%22%20height%3D%2210%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%2215%22%20x%3D%22470.5%22%20y%3D%22161.6094%22%2F%3E%3Crect%20fill%3D%22%23E1F5FE%22%20height%3D%222%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%224%22%20x%3D%22468.5%22%20y%3D%22163.6094%22%2F%3E%3Crect%20fill%3D%22%23E1F5FE%22%20height%3D%222%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%224%22%20x%3D%22468.5%22%20y%3D%22167.6094%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22Verdana%22%20font-size%3D%2210%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2230%22%20x%3D%22435.5%22%20y%3D%22185.8916%22%3E%26%2335302%3B%26%2325720%3B%26%2323631%3B%3C%2Ftext%3E%3C%2Fg%3E%3Cg%20id%3D%22elem_run_btn%22%3E%3Crect%20fill%3D%22%23E1F5FE%22%20height%3D%2241.6406%22%20rx%3D%222.5%22%20ry%3D%222.5%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%2280%22%20x%3D%22525.5%22%20y%3D%22156.6094%22%2F%3E%3Crect%20fill%3D%22%23E1F5FE%22%20height%3D%2210%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%2215%22%20x%3D%22585.5%22%20y%3D%22161.6094%22%2F%3E%3Crect%20fill%3D%22%23E1F5FE%22%20height%3D%222%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%224%22%20x%3D%22583.5%22%20y%3D%22163.6094%22%2F%3E%3Crect%20fill%3D%22%23E1F5FE%22%20height%3D%222%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%224%22%20x%3D%22583.5%22%20y%3D%22167.6094%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22Verdana%22%20font-size%3D%2210%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2240%22%20x%3D%22540.5%22%20y%3D%22185.8916%22%3E%26%2336816%3B%26%2334892%3B%26%2325353%3B%26%2338062%3B%3C%2Ftext%3E%3C%2Fg%3E%3Cg%20id%3D%22elem_stop_btn%22%3E%3Crect%20fill%3D%22%23E1F5FE%22%20height%3D%2241.6406%22%20rx%3D%222.5%22%20ry%3D%222.5%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%2280%22%20x%3D%22640.5%22%20y%3D%22156.6094%22%2F%3E%3Crect%20fill%3D%22%23E1F5FE%22%20height%3D%2210%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%2215%22%20x%3D%22700.5%22%20y%3D%22161.6094%22%2F%3E%3Crect%20fill%3D%22%23E1F5FE%22%20height%3D%222%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%224%22%20x%3D%22698.5%22%20y%3D%22163.6094%22%2F%3E%3Crect%20fill%3D%22%23E1F5FE%22%20height%3D%222%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%224%22%20x%3D%22698.5%22%20y%3D%22167.6094%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22Verdana%22%20font-size%3D%2210%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2240%22%20x%3D%22655.5%22%20y%3D%22185.8916%22%3E%26%2320572%3B%26%2327490%3B%26%2325353%3B%26%2338062%3B%3C%2Ftext%3E%3C%2Fg%3E%3Cg%20id%3D%22elem_speed_slider%22%3E%3Crect%20fill%3D%22%23E1F5FE%22%20height%3D%2241.6406%22%20rx%3D%222.5%22%20ry%3D%222.5%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%2290%22%20x%3D%22755.5%22%20y%3D%22156.6094%22%2F%3E%3Crect%20fill%3D%22%23E1F5FE%22%20height%3D%2210%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%2215%22%20x%3D%22825.5%22%20y%3D%22161.6094%22%2F%3E%3Crect%20fill%3D%22%23E1F5FE%22%20height%3D%222%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%224%22%20x%3D%22823.5%22%20y%3D%22163.6094%22%2F%3E%3Crect%20fill%3D%22%23E1F5FE%22%20height%3D%222%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%224%22%20x%3D%22823.5%22%20y%3D%22167.6094%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22Verdana%22%20font-size%3D%2210%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2250%22%20x%3D%22770.5%22%20y%3D%22185.8916%22%3E%26%2336895%3B%26%2324230%3B%26%2328369%3B%26%2321160%3B%26%2326465%3B%3C%2Ftext%3E%3C%2Fg%3E%3Cg%20id%3D%22elem_angle_slider%22%3E%3Crect%20fill%3D%22%23E1F5FE%22%20height%3D%2241.6406%22%20rx%3D%222.5%22%20ry%3D%222.5%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%2290%22%20x%3D%22880.5%22%20y%3D%22156.6094%22%2F%3E%3Crect%20fill%3D%22%23E1F5FE%22%20height%3D%2210%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%2215%22%20x%3D%22950.5%22%20y%3D%22161.6094%22%2F%3E%3Crect%20fill%3D%22%23E1F5FE%22%20height%3D%222%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%224%22%20x%3D%22948.5%22%20y%3D%22163.6094%22%2F%3E%3Crect%20fill%3D%22%23E1F5FE%22%20height%3D%222%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%224%22%20x%3D%22948.5%22%20y%3D%22167.6094%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22Verdana%22%20font-size%3D%2210%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2250%22%20x%3D%22895.5%22%20y%3D%22185.8916%22%3E%26%2335282%3B%26%2324230%3B%26%2328369%3B%26%2321160%3B%26%2326465%3B%3C%2Ftext%3E%3C%2Fg%3E%3Cg%20id%3D%22elem_speed_label%22%3E%3Crect%20fill%3D%22%23E1F5FE%22%20height%3D%2241.6406%22%20rx%3D%222.5%22%20ry%3D%222.5%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%22100%22%20x%3D%22285.5%22%20y%3D%22156.6094%22%2F%3E%3Crect%20fill%3D%22%23E1F5FE%22%20height%3D%2210%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%2215%22%20x%3D%22365.5%22%20y%3D%22161.6094%22%2F%3E%3Crect%20fill%3D%22%23E1F5FE%22%20height%3D%222%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%224%22%20x%3D%22363.5%22%20y%3D%22163.6094%22%2F%3E%3Crect%20fill%3D%22%23E1F5FE%22%20height%3D%222%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%224%22%20x%3D%22363.5%22%20y%3D%22167.6094%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22Verdana%22%20font-size%3D%2210%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2260%22%20x%3D%22300.5%22%20y%3D%22185.8916%22%3E%26%2336895%3B%26%2324230%3B%26%2326174%3B%26%2331034%3B%26%2326631%3B%26%2331614%3B%3C%2Ftext%3E%3C%2Fg%3E%3Cg%20id%3D%22elem_angle_label%22%3E%3Crect%20fill%3D%22%23E1F5FE%22%20height%3D%2241.6406%22%20rx%3D%222.5%22%20ry%3D%222.5%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%22100%22%20x%3D%221005.5%22%20y%3D%22156.6094%22%2F%3E%3Crect%20fill%3D%22%23E1F5FE%22%20height%3D%2210%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%2215%22%20x%3D%221085.5%22%20y%3D%22161.6094%22%2F%3E%3Crect%20fill%3D%22%23E1F5FE%22%20height%3D%222%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%224%22%20x%3D%221083.5%22%20y%3D%22163.6094%22%2F%3E%3Crect%20fill%3D%22%23E1F5FE%22%20height%3D%222%22%20style%3D%22stroke%3A%230277BD%3Bstroke-width%3A1.0%3B%22%20width%3D%224%22%20x%3D%221083.5%22%20y%3D%22167.6094%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22Verdana%22%20font-size%3D%2210%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2260%22%20x%3D%221020.5%22%20y%3D%22185.8916%22%3E%26%2335282%3B%26%2324230%3B%26%2326174%3B%26%2331034%3B%26%2326631%3B%26%2331614%3B%3C%2Ftext%3E%3C%2Fg%3E%3Cg%20id%3D%22elem_ble_comm%22%3E%3Cpath%20d%3D%22M817.6097%2C530.1604%20C821.2838%2C523.3771%20828.4525%2C524.2548%20832.0747%2C530.2193%20C835.021%2C522.1702%20841.4404%2C522.3366%20846.4466%2C528.0716%20C848.9907%2C519.8391%20855.0878%2C520.5462%20860.0978%2C525.5233%20C864.4846%2C519.2018%20870.8581%2C519.6816%20873.8969%2C526.8974%20C879.235%2C522.5933%20883.3616%2C521.9386%20886.3975%2C529.3533%20C892.0637%2C523.631%20896.8359%2C523.3368%20900.9527%2C531.0338%20C908.6863%2C530.8141%20910.8728%2C537.1947%20907.5807%2C543.0544%20C912.921%2C551.2358%20909.4057%2C555.3779%20900.9896%2C557.1073%20C898.0446%2C565.4111%20892.4711%2C566.0845%20886.9485%2C559.5457%20C884.3086%2C568.5624%20879.3692%2C568.7199%20872.822%2C563.3942%20C870.2589%2C570.3248%20864.8095%2C572.585%20859.3675%2C566.3323%20C853.375%2C571.8858%20848.625%2C570.4173%20846.2295%2C562.7562%20C839.7992%2C569.8373%20834.5971%2C568.026%20831.4676%2C559.6117%20C826.2535%2C564.5478%20819.9011%2C562.1031%20818.5091%2C555.3681%20C812.0213%2C553.952%20808.6764%2C549.2198%20813.567%2C543.1871%20C808.394%2C536.8827%20809.5852%2C532.3691%20817.6097%2C530.1604%20%22%20fill%3D%22%23E1BEE7%22%20style%3D%22stroke%3A%23000000%3Bstroke-width%3A1.0%3B%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22Verdana%22%20font-size%3D%2210%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2268%22%20x%3D%22824.5%22%20y%3D%22545.8916%22%3EBLE%20GATT%26%2336890%3B%26%2320449%3B%3C%2Ftext%3E%3C%2Fg%3E%3Cg%20id%3D%22elem_GMN36%22%3E%3Cpath%20d%3D%22M299.5%2C57.6094%20L299.5%2C79.25%20L443.5%2C79.25%20L443.5%2C67.6094%20L433.5%2C57.6094%20L299.5%2C57.6094%20%22%20fill%3D%22%23FFFFFF%22%20style%3D%22stroke%3A%23000000%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cpath%20d%3D%22M433.5%2C57.6094%20L433.5%2C67.6094%20L443.5%2C67.6094%20L433.5%2C57.6094%20%22%20fill%3D%22%23FFFFFF%22%20style%3D%22stroke%3A%23000000%3Bstroke-width%3A1.0%3B%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22Verdana%22%20font-size%3D%2210%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%22123%22%20x%3D%22305.5%22%20y%3D%2271.8916%22%3E%26%2321452%3BESP32%26%2327493%3B%26%2336827%3B%26%2330005%3B%26%2326426%3B%26%2325511%3B%26%2321046%3B%26%2331995%3B%26%2332479%3B%3C%2Ftext%3E%3C%2Fg%3E%3Cg%20id%3D%22elem_GMN39%22%3E%3Cpath%20d%3D%22M11%2C166.6094%20L11%2C188.25%20L250%2C188.25%20L250%2C176.6094%20L240%2C166.6094%20L11%2C166.6094%20%22%20fill%3D%22%23FFFFFF%22%20style%3D%22stroke%3A%23000000%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cpath%20d%3D%22M240%2C166.6094%20L240%2C176.6094%20L250%2C176.6094%20L240%2C166.6094%20%22%20fill%3D%22%23FFFFFF%22%20style%3D%22stroke%3A%23000000%3Bstroke-width%3A1.0%3B%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22Verdana%22%20font-size%3D%2210%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%22218%22%20x%3D%2217%22%20y%3D%22180.8916%22%3E%26%2336890%3B%26%2336807%3BBLE%20GATT%26%2323454%3B%26%2329616%3BHMI%26%2319982%3B%26%2330005%3B%26%2326426%3B%26%2325511%3B%26%2321046%3B%26%2322120%3B%26%2330340%3B%26%2326080%3B%26%2332447%3B%26%2336890%3B%26%2320449%3B%3C%2Ftext%3E%3C%2Fg%3E%3Cg%20id%3D%22link_touchscreen_touch_handler%22%3E%3Cpath%20d%3D%22M476.861%2C198.6614%20C485.926%2C206.6344%20496.846%2C215.5664%20507.5%2C222.6094%20C547.885%2C249.3054%20592.1017%2C271.0381%20627.8507%2C287.0941%20%22%20fill%3D%22none%22%20id%3D%22touchscreen-to-touch_handler%22%20style%3D%22stroke%3A%23000000%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cpolygon%20fill%3D%22%23000000%22%20points%3D%22633.324%2C289.5524%2C626.7529%2C282.2162%2C628.7629%2C287.5038%2C623.4752%2C289.5139%2C633.324%2C289.5524%22%20style%3D%22stroke%3A%23000000%3Bstroke-width%3A1.0%3B%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22Verdana%22%20font-size%3D%2210%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2240%22%20x%3D%22540.5%22%20y%3D%22240.8916%22%3E%26%2335302%3B%26%2325720%3B%26%2320107%3B%26%2320214%3B%3C%2Ftext%3E%3C%2Fg%3E%3Cg%20id%3D%22link_run_btn_touch_handler%22%3E%3Cpath%20d%3D%22M583.217%2C198.7914%20C604.764%2C223.3364%20636.9737%2C260.0273%20658.6157%2C284.6803%20%22%20fill%3D%22none%22%20id%3D%22run_btn-to-touch_handler%22%20style%3D%22stroke%3A%23000000%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cpolygon%20fill%3D%22%23000000%22%20points%3D%22662.574%2C289.1894%2C659.6425%2C279.7869%2C659.2754%2C285.4318%2C653.6305%2C285.0647%2C662.574%2C289.1894%22%20style%3D%22stroke%3A%23000000%3Bstroke-width%3A1.0%3B%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22Verdana%22%20font-size%3D%2210%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2243%22%20x%3D%22621.5%22%20y%3D%22240.8916%22%3ERUN%26%2325351%3B%26%2320196%3B%3C%2Ftext%3E%3C%2Fg%3E%3Cg%20id%3D%22link_stop_btn_touch_handler%22%3E%3Cpath%20d%3D%22M680.5%2C198.7914%20C680.5%2C223.3364%20680.5%2C258.5364%20680.5%2C283.1894%20%22%20fill%3D%22none%22%20id%3D%22stop_btn-to-touch_handler%22%20style%3D%22stroke%3A%23000000%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cpolygon%20fill%3D%22%23000000%22%20points%3D%22680.5%2C289.1894%2C684.5%2C280.1894%2C680.5%2C284.1894%2C676.5%2C280.1894%2C680.5%2C289.1894%22%20style%3D%22stroke%3A%23000000%3Bstroke-width%3A1.0%3B%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22Verdana%22%20font-size%3D%2210%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2247%22%20x%3D%22681.5%22%20y%3D%22240.8916%22%3ESTOP%26%2325351%3B%26%2320196%3B%3C%2Ftext%3E%3C%2Fg%3E%3Cg%20id%3D%22link_speed_slider_touch_handler%22%3E%3Cpath%20d%3D%22M782.013%2C198.7914%20C759.529%2C223.3364%20725.8418%2C260.1121%20703.2588%2C284.7651%20%22%20fill%3D%22none%22%20id%3D%22speed_slider-to-touch_handler%22%20style%3D%22stroke%3A%23000000%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cpolygon%20fill%3D%22%23000000%22%20points%3D%22699.206%2C289.1894%2C708.2348%2C285.2548%2C702.5834%2C285.5024%2C702.3357%2C279.851%2C699.206%2C289.1894%22%20style%3D%22stroke%3A%23000000%3Bstroke-width%3A1.0%3B%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22Verdana%22%20font-size%3D%2210%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2230%22%20x%3D%22751.5%22%20y%3D%22240.8916%22%3E%26%2336895%3B%26%2324230%3B%26%2320540%3B%3C%2Ftext%3E%3C%2Fg%3E%3Cg%20id%3D%22link_angle_slider_touch_handler%22%3E%3Cpath%20d%3D%22M899.32%2C198.7134%20C888.512%2C206.6044%20875.682%2C215.4634%20863.5%2C222.6094%20C819.35%2C248.5064%20771.7716%2C270.6728%20734.1756%2C287.0528%20%22%20fill%3D%22none%22%20id%3D%22angle_slider-to-touch_handler%22%20style%3D%22stroke%3A%23000000%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cpolygon%20fill%3D%22%23000000%22%20points%3D%22728.675%2C289.4494%2C738.5236%2C289.5217%2C733.2588%2C287.4523%2C735.3282%2C282.1875%2C728.675%2C289.4494%22%20style%3D%22stroke%3A%23000000%3Bstroke-width%3A1.0%3B%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22Verdana%22%20font-size%3D%2210%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2230%22%20x%3D%22849.5%22%20y%3D%22240.8916%22%3E%26%2335282%3B%26%2324230%3B%26%2320540%3B%3C%2Ftext%3E%3C%2Fg%3E%3Cg%20id%3D%22link_touch_handler_lvgl%22%3E%3Cpath%20d%3D%22M680.5%2C331.8114%20C680.5%2C352.3794%20680.5%2C378.0774%20680.5%2C398.5824%20%22%20fill%3D%22none%22%20id%3D%22touch_handler-to-lvgl%22%20style%3D%22stroke%3A%23000000%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cpolygon%20fill%3D%22%23000000%22%20points%3D%22680.5%2C404.5824%2C684.5%2C395.5824%2C680.5%2C399.5824%2C676.5%2C395.5824%2C680.5%2C404.5824%22%20style%3D%22stroke%3A%23000000%3Bstroke-width%3A1.0%3B%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22Verdana%22%20font-size%3D%2210%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2231%22%20x%3D%22681.5%22%20y%3D%22371.8916%22%3EUI%26%2326356%3B%26%2326032%3B%3C%2Ftext%3E%3C%2Fg%3E%3Cg%20id%3D%22link_lvgl_ble_client%22%3E%3Cpath%20d%3D%22M737.31%2C425.6094%20C761.932%2C425.6094%20784.353%2C425.6094%20807.481%2C425.6094%20%22%20fill%3D%22none%22%20id%3D%22lvgl-to-ble_client%22%20style%3D%22stroke%3A%23000000%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cpolygon%20fill%3D%22%23000000%22%20points%3D%22813.481%2C425.6094%2C804.481%2C421.6094%2C808.481%2C425.6094%2C804.481%2C429.6094%2C813.481%2C425.6094%22%20style%3D%22stroke%3A%23000000%3Bstroke-width%3A1.0%3B%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22Verdana%22%20font-size%3D%2210%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2240%22%20x%3D%22755.25%22%20y%3D%22419.8916%22%3E%26%2325511%3B%26%2321046%3B%26%2325351%3B%26%2320196%3B%3C%2Ftext%3E%3C%2Fg%3E%3Cg%20id%3D%22link_ble_client_ble_comm%22%3E%3Cpath%20d%3D%22M858.5%2C446.6404%20C858.5%2C467.6194%20858.5%2C494.3844%20858.5%2C515.4214%20%22%20fill%3D%22none%22%20id%3D%22ble_client-to-ble_comm%22%20style%3D%22stroke%3A%23000000%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cpolygon%20fill%3D%22%23000000%22%20points%3D%22858.5%2C521.4214%2C862.5%2C512.4214%2C858.5%2C516.4214%2C854.5%2C512.4214%2C858.5%2C521.4214%22%20style%3D%22stroke%3A%23000000%3Bstroke-width%3A1.0%3B%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22Verdana%22%20font-size%3D%2210%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2240%22%20x%3D%22859.5%22%20y%3D%22488.8916%22%3EBLE%26%2320256%3B%26%2336755%3B%3C%2Ftext%3E%3C%2Fg%3E%3Cg%20id%3D%22link_ble_comm_ble_server%22%3E%3Cpath%20d%3D%22M858.5%2C563.7654%20C858.5%2C588.0004%20858.5%2C622.4234%20858.5%2C646.5944%20%22%20fill%3D%22none%22%20id%3D%22ble_comm-to-ble_server%22%20style%3D%22stroke%3A%23000000%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cpolygon%20fill%3D%22%23000000%22%20points%3D%22858.5%2C652.5944%2C862.5%2C643.5944%2C858.5%2C647.5944%2C854.5%2C643.5944%2C858.5%2C652.5944%22%20style%3D%22stroke%3A%23000000%3Bstroke-width%3A1.0%3B%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22Verdana%22%20font-size%3D%2210%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2230%22%20x%3D%22859.5%22%20y%3D%22603.8916%22%3E%26%2329305%3B%26%2324449%3B%26%2320540%3B%3C%2Ftext%3E%3C%2Fg%3E%3Cg%20id%3D%22link_ble_server_tmc4361%22%3E%3Cpath%20d%3D%22M858.5%2C694.8114%20C858.5%2C715.3794%20858.5%2C741.0774%20858.5%2C761.5824%20%22%20fill%3D%22none%22%20id%3D%22ble_server-to-tmc4361%22%20style%3D%22stroke%3A%23000000%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cpolygon%20fill%3D%22%23000000%22%20points%3D%22858.5%2C767.5824%2C862.5%2C758.5824%2C858.5%2C762.5824%2C854.5%2C758.5824%2C858.5%2C767.5824%22%20style%3D%22stroke%3A%23000000%3Bstroke-width%3A1.0%3B%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22Verdana%22%20font-size%3D%2210%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2263%22%20x%3D%22859.5%22%20y%3D%22734.8916%22%3E%26%2336895%3B%26%2324230%3B%2F%26%2335282%3B%26%2324230%3B%26%2321629%3B%26%2320196%3B%3C%2Ftext%3E%3C%2Fg%3E%3Cg%20id%3D%22link_tmc4361_tmc2160%22%3E%3Cpath%20d%3D%22M858.5%2C809.8114%20C858.5%2C830.3794%20858.5%2C856.0774%20858.5%2C876.5824%20%22%20fill%3D%22none%22%20id%3D%22tmc4361-to-tmc2160%22%20style%3D%22stroke%3A%23000000%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cpolygon%20fill%3D%22%23000000%22%20points%3D%22858.5%2C882.5824%2C862.5%2C873.5824%2C858.5%2C877.5824%2C854.5%2C873.5824%2C858.5%2C882.5824%22%20style%3D%22stroke%3A%23000000%3Bstroke-width%3A1.0%3B%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22Verdana%22%20font-size%3D%2210%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2240%22%20x%3D%22859.5%22%20y%3D%22849.8916%22%3E%26%2336816%3B%26%2321160%3B%26%2321442%3B%26%2325968%3B%3C%2Ftext%3E%3C%2Fg%3E%3Cg%20id%3D%22link_tmc2160_stepper%22%3E%3Cpath%20d%3D%22M858.5%2C924.8114%20C858.5%2C945.3794%20858.5%2C971.0774%20858.5%2C991.5822%20%22%20fill%3D%22none%22%20id%3D%22tmc2160-to-stepper%22%20style%3D%22stroke%3A%23000000%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cpolygon%20fill%3D%22%23000000%22%20points%3D%22858.5%2C997.5822%2C862.5%2C988.5822%2C858.5%2C992.5822%2C854.5%2C988.5822%2C858.5%2C997.5822%22%20style%3D%22stroke%3A%23000000%3Bstroke-width%3A1.0%3B%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22Verdana%22%20font-size%3D%2210%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2240%22%20x%3D%22859.5%22%20y%3D%22964.8916%22%3E%26%2339537%3B%26%2321160%3B%26%2320449%3B%26%2321495%3B%3C%2Ftext%3E%3C%2Fg%3E%3Cg%20id%3D%22link_lvgl_speed_label%22%3E%3Cpath%20d%3D%22M647.4757%2C401.0619%20C582.7117%2C354.8819%20428.588%2C244.9844%20363.733%2C198.7404%20%22%20fill%3D%22none%22%20id%3D%22lvgl-backto-speed_label%22%20style%3D%22stroke%3A%23000000%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cpolygon%20fill%3D%22%23000000%22%20points%3D%22652.361%2C404.5454%2C647.3554%2C396.0634%2C648.29%2C401.6425%2C642.7108%2C402.5771%2C652.361%2C404.5454%22%20style%3D%22stroke%3A%23000000%3Bstroke-width%3A1.0%3B%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22Verdana%22%20font-size%3D%2210%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2240%22%20x%3D%22549.5%22%20y%3D%22314.3916%22%3E%26%2326174%3B%26%2331034%3B%26%2326356%3B%26%2326032%3B%3C%2Ftext%3E%3C%2Fg%3E%3Cg%20id%3D%22link_lvgl_angle_label%22%3E%3Cpath%20d%3D%22M716.1228%2C401.2567%20C771.4828%2C364.9627%20886.923%2C289.2724%20988.5%2C222.6094%20C1000.367%2C214.8214%201013.41%2C206.2544%201024.82%2C198.7654%20%22%20fill%3D%22none%22%20id%3D%22lvgl-backto-angle_label%22%20style%3D%22stroke%3A%23000000%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cpolygon%20fill%3D%22%23000000%22%20points%3D%22711.105%2C404.5464%2C720.8248%2C402.9571%2C715.2865%2C401.805%2C716.4386%2C396.2667%2C711.105%2C404.5464%22%20style%3D%22stroke%3A%23000000%3Bstroke-width%3A1.0%3B%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22Verdana%22%20font-size%3D%2210%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2240%22%20x%3D%22942.5%22%20y%3D%22314.3916%22%3E%26%2326174%3B%26%2331034%3B%26%2326356%3B%26%2326032%3B%3C%2Ftext%3E%3C%2Fg%3E%3Cg%20id%3D%22link_GMN36_angle_label%22%3E%3Cpath%20d%3D%22M443.71%2C69.7394%20C584.844%2C70.9094%20891.917%2C78.1854%20988.5%2C118.6094%20C1008.227%2C126.8654%201026.28%2C143.2554%201038.67%2C156.5124%20%22%20fill%3D%22none%22%20id%3D%22GMN36-angle_label%22%20style%3D%22stroke%3A%23000000%3Bstroke-width%3A1.0%3Bstroke-dasharray%3A7.0%2C7.0%3B%22%2F%3E%3C%2Fg%3E%3Cg%20id%3D%22link_GMN36_GMN39%22%3E%3Cpath%20d%3D%22M348.827%2C79.6754%20C302.895%2C100.0694%20199.317%2C146.0554%20153.288%2C166.4914%20%22%20fill%3D%22none%22%20id%3D%22GMN36-GMN39%22%20style%3D%22stroke%3A%23000000%3Bstroke-width%3A1.0%3Bstroke-dasharray%3A7.0%2C7.0%3B%22%2F%3E%3C%2Fg%3E%3C%2Fg%3E%3C%2Fsvg%3E)
一、上位机控制层(HMI)
- 人机交互界面
- 基于LVGL9图形库构建的触摸界面
- 速度控制滑动条(-100~100 RPM范围)
- 角度控制滑动条(-180~180度范围)
- RUN/STOP控制按钮
- BLE客户端模块
- 连接下位机BLE服务器
- 将用户操作转换为控制指令
- 通过GATT特性值写入传输指令
二、下位机执行层(ESP32 XIAO)
- BLE服务端模块
- 提供BLE服务与特性值
- 接收上位机指令
- 解析速度与角度控制参数
- 电机驱动核心
- TMC4361A运动控制器配置
- TMC2160步进电机驱动器配置
- 速度模式与位置模式切换
- 微步控制与加速度规划
- 电机控制算法
- RPM到步进脉冲的转换
- 角度到步进位置的计算
- 梯形加速度曲线实现
代码详解
下位机软件流程图:

上位机软件流程图:

本次项目涉及到三个关键部分:电机控制、数据传输与显示,接下来结合相关代码来进行讲解:
一、电机控制模块(下位机)
首先是初始化,电机控制的初始化分为TMC4361A和TMC2160两部分。需要注意的是,我们通过TMC4361A来透传SPI数据给TMC2160,需要严格按照手册中的通信步骤和包定义来发出SPI信息。
void setup()
{
...
// Init TMC4361 clock
// --- 初始化 8MHz PWM on D8 ---
ledcSetup(PWM_CHANNEL, TMC4361_CLK_FREQ, PWM_RESOLUTION); // 设置通道
ledcAttachPin(TMC4361_CLK_PIN, PWM_CHANNEL); // 将通道与对应的引脚连接
ledcWrite(PWM_CHANNEL, 2);
tmc.begin(TMC4361_CLK_FREQ, TMC4361_CS_PIN);
tmc.writeRegister(TMC4361_SPIOUT_CONF_REGISTER, 0x4440128D);
delay(5);
tmc.writeRegister(TMC4361_COVER_HIGH_REGISTER, 0xec);
tmc.writeRegister(TMC4361_COVER_LOW_REGISTER, 0x004140C5);
delay(5);
tmc.writeRegister(TMC4361_COVER_HIGH_REGISTER, 0x90);
tmc.writeRegister(TMC4361_COVER_LOW_REGISTER, 0x00070803);
delay(5);
tmc.writeRegister(TMC4361_COVER_HIGH_REGISTER, 0x91);
tmc.writeRegister(TMC4361_COVER_LOW_REGISTER, 0x0000000A);
delay(5);
tmc.writeRegister(TMC4361_COVER_HIGH_REGISTER, 0x80);
tmc.writeRegister(TMC4361_COVER_LOW_REGISTER, 0x00000004);
delay(5);
tmc.writeRegister(TMC4361_COVER_HIGH_REGISTER, 0x93);
tmc.writeRegister(TMC4361_COVER_LOW_REGISTER, 0x00000000);
delay(5);
tmc.writeRegister(0X24, 0x00000000);
tmc.writeRegister(0X21, 0x00000000);
tmc.writeRegister(0X37, 0x00000000);
delay(5);
...
}
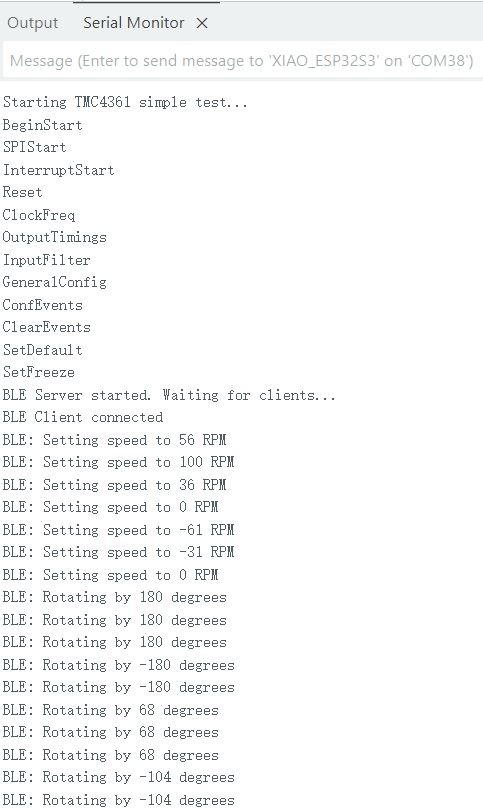
下位机监听到数据变更后,在回调函数中实施控制:
// BLE characteristic write callbacks
class BLEWriteCallbacks : public BLECharacteristicCallbacks {
void onWrite(BLECharacteristic *characteristic) {
std::string value = characteristic->getValue();
if (value.length() > 0) {
// Convert string to integer
int32_t number = atoi(value.c_str());
if (characteristic == pCharSpeed) {
Serial.print("BLE: Setting speed to ");
Serial.print(number);
Serial.println(" RPM");
setSpeedInRPM(number);
} else if (characteristic == pCharAngle) {
Serial.print("BLE: Rotating by ");
Serial.print(number);
Serial.println(" degrees");
rotateByDegrees(number);
}
}
}
};
二、数据传输(上位机&下位机)
1. BLE GATT服务定义
我们使用了2个特征来分别代表速度、角度信息,在上、下位机都可以看到相同的UUID:
// BLE Service and Characteristics UUIDs
#define BLE_SERVICE_UUID "4fafc201-1fb5-459e-8fcc-c5c9c331914b"
#define BLE_CHAR_UUID_SPEED "beb5483e-36e1-4688-b7f5-ea07361b26a8" // Speed control
#define BLE_CHAR_UUID_ANGLE "c1f0a8a5-5d0d-4f1c-9a1b-7a7c7a7d7e7f" // Angle control
2. 下位机 GATT Server
我们在下位机初始化一个名为 "ESP32_S3_Server" 的GATT Server,使用公约的UUID创建一个服务以及两个特征,特征均定义为可读写。
// Initialize BLE server
BLEDevice::init("ESP32_S3_Server");
pBLEServer = BLEDevice::createServer();
pBLEServer->setCallbacks(new BLEConnectionCallbacks());
// Create BLE service
BLEService *pService = pBLEServer->createService(BLE_SERVICE_UUID);
// Create speed control characteristic
pCharSpeed = pService->createCharacteristic(
BLE_CHAR_UUID_SPEED,
BLECharacteristic::PROPERTY_READ |
BLECharacteristic::PROPERTY_WRITE
);
pCharSpeed->addDescriptor(new BLE2902());
pCharSpeed->setCallbacks(new BLEWriteCallbacks());
// Create angle control characteristic
pCharAngle = pService->createCharacteristic(
BLE_CHAR_UUID_ANGLE,
BLECharacteristic::PROPERTY_READ |
BLECharacteristic::PROPERTY_WRITE
);
pCharAngle->addDescriptor(new BLE2902());
pCharAngle->setCallbacks(new BLEWriteCallbacks());
// Start service and advertising
pService->start();
pBLEServer->getAdvertising()->start();
Serial.println("BLE Server started. Waiting for clients...");
3. 上位机 GATT Client
相应地,上位机要连接到Server端对应的Service和Characteristic。
static bool connectToServer() {
Serial.print("Connecting to: ");
Serial.println(myDevice->getAddress().toString().c_str());
pClient = BLEDevice::createClient();
pClient->setClientCallbacks(new MyClientCallback());
// Connect to the server
if (!pClient->connect(myDevice)) {
Serial.println("Connection failed");
return false;
}
Serial.println("Connected to server");
// Get remote service
pRemoteService = pClient->getService(SERVICE_UUID);
if (pRemoteService == nullptr) {
Serial.print("Service not found with UUID: ");
Serial.println(SERVICE_UUID);
pClient->disconnect();
return false;
}
// Get speed characteristic
pRemoteCharacteristicSpeed = pRemoteService->getCharacteristic(CHARACTERISTIC_UUID_SPEED);
if (pRemoteCharacteristicSpeed == nullptr) {
Serial.print("Characteristic not found with UUID: ");
Serial.println(CHARACTERISTIC_UUID_SPEED);
pClient->disconnect();
return false;
}
// Get angle characteristic
pRemoteCharacteristicAngle = pRemoteService->getCharacteristic(CHARACTERISTIC_UUID_ANGLE);
if (pRemoteCharacteristicAngle == nullptr) {
Serial.print("Characteristic not found with UUID: ");
Serial.println(CHARACTERISTIC_UUID_ANGLE);
pClient->disconnect();
return false;
}
Serial.println("Connected and all characteristics found");
connected = true;
return true;
}
三、显示模块设计(上位机)
这一次我们使用LVGL 9作为UI框架,相比以前CrowPanel提供的 LVGL 8有较大的代码变更,需要进行一系列修改,但主要思路不变。经过改造之后
1. LCD与图形框架初始化
void setup() {
...
// lvgl初始化
lv_init();
// Initialize LCD and touch screen
init_lcd_touch();
// GUI界面初始化和事件初始化
setup_ui(&guider_ui);
events_init(&guider_ui);
...
}
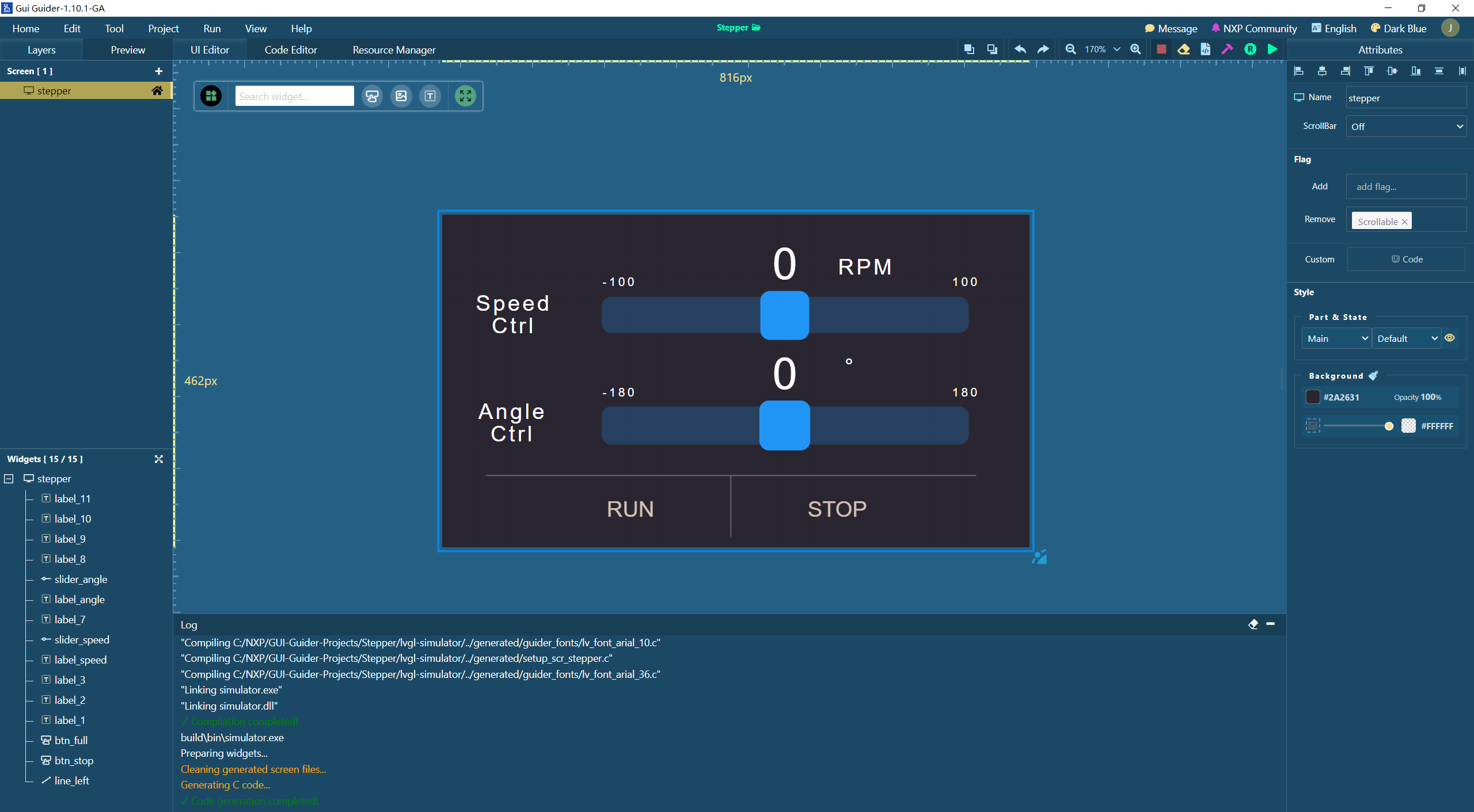
2. UI设计
使用NXP的GUI Guider来进行UI设计,这里我使用了两个滑条来控制速度与角度,两个按钮分别控制电机运转与停止。
3. 实时渲染优化
xTaskCreatePinnedToCore(lvgl_task, "LVGL Task", 40960, NULL, 1, NULL, 0); // 核心0,增加栈大小到40960
void lvgl_task(void *pvParameters) {
printf("Task Core id:%d\n", xPortGetCoreID());
printf("Task CPU Freq:%d\n", getCpuFrequencyMhz());
while (1) {
lv_task_handler(); /* 让 GUI 完成其工作 */
lv_tick_inc(33); /* 告诉 LVGL 经过了多少时间 */
vTaskDelay(pdMS_TO_TICKS(33));
}
}
- 多核架构:显示任务运行在核心0,数据处理在核心1
- 刷新周期:33ms(约30FPS,符合人眼视觉暂留特性)
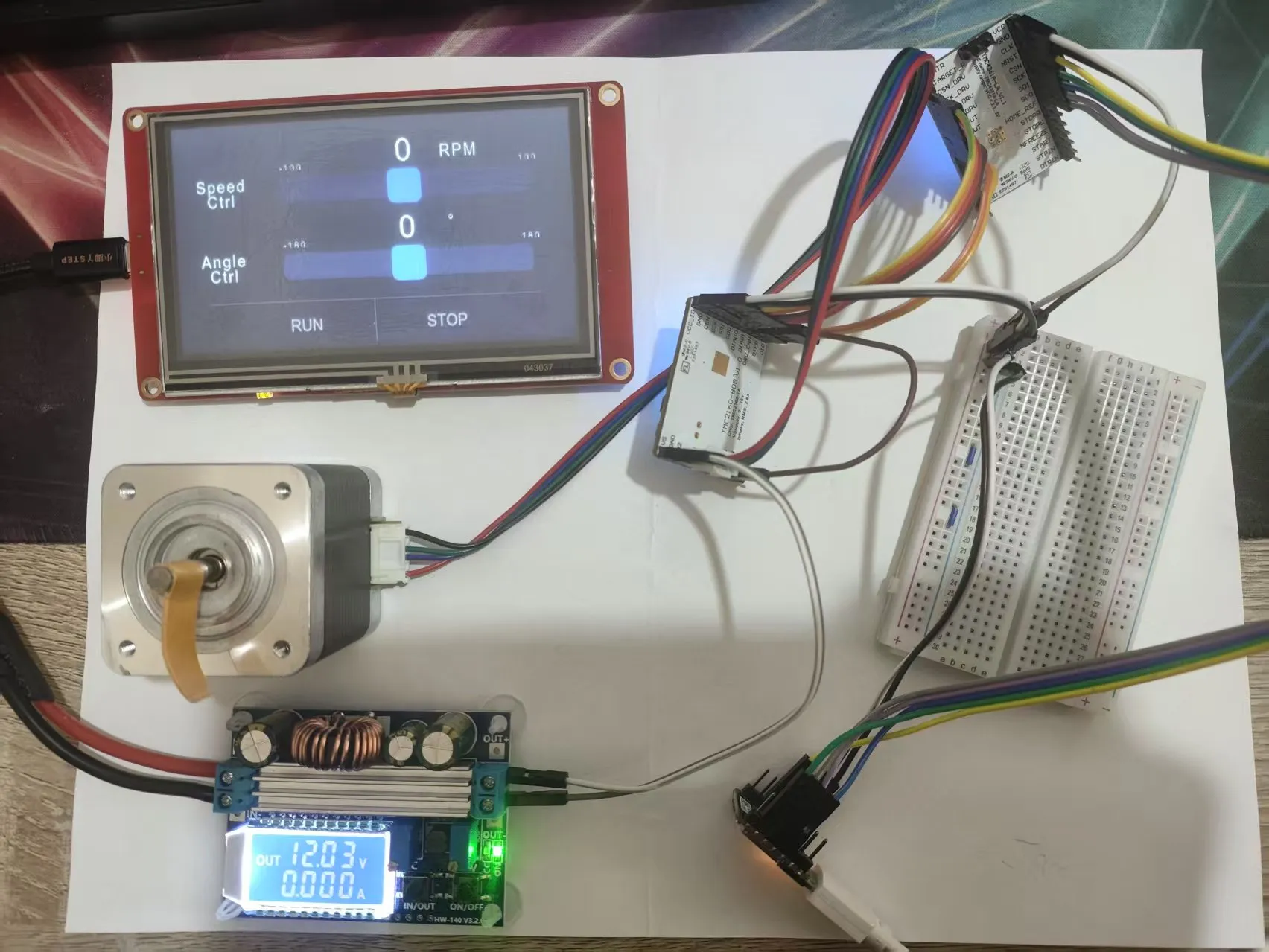
效果展示
整体效果
下位机串口输出信息
遇到的问题与解决办法
上位机重启后,无法重新连接下位机.
原因分析:下位机连接断开后,没有再次进入广告模式。
解决办法:下位机监听连接断开事件,手动进入广告模式。
// BLE connection callbacks
class BLEConnectionCallbacks : public BLEServerCallbacks {
void onConnect(BLEServer* server) {
Serial.println("BLE Client connected");
}
void onDisconnect(BLEServer* server) {
Serial.println("BLE Client disconnected, restarting advertising...");
server->getAdvertising()->start();
}
};
活动感想
本项目是我第一次接触目前产业正在广泛使用的步进电机精确控制方案,让我深入实践了电机控制技术,进一步丰富了技能树。同时,这也是我第一次基于LVGL 9进行电机控制界面开发,对LVGL的开发也得到了进一步的锻炼。特别感谢硬禾科技提供的高质量开发平台,这次任务使用到的一系列板卡都是参与硬禾往期活动时收获的,能借Funpack4-3再次让它们发光发热也是一件非常开心的事情。
感谢硬禾学堂举办的寒假练活动,祝硬禾的活动越办越好!

 枫雪天
枫雪天