
项目介绍
本项目背景是2024艾迈斯欧司朗dToF传感器光电设计竞赛,使用硬禾提供的dToF定制模块,完成给出的任务。
本项目使用dToF传感器为主体,使用ART-Pi板卡驱动,测算出传感器距离屏幕的夹角和垂直最小距离.
硬件说明
上图为tmf8821 dToF模块,集小型、高灵敏、准确与一体的传感器模块。 
上图为ART-Pi开发板,是 RT-Thread 团队推出的高性能开源硬件开发板,专为嵌入式开发者及 DIY 爱好者设计,支持灵活扩展和多样化应用。 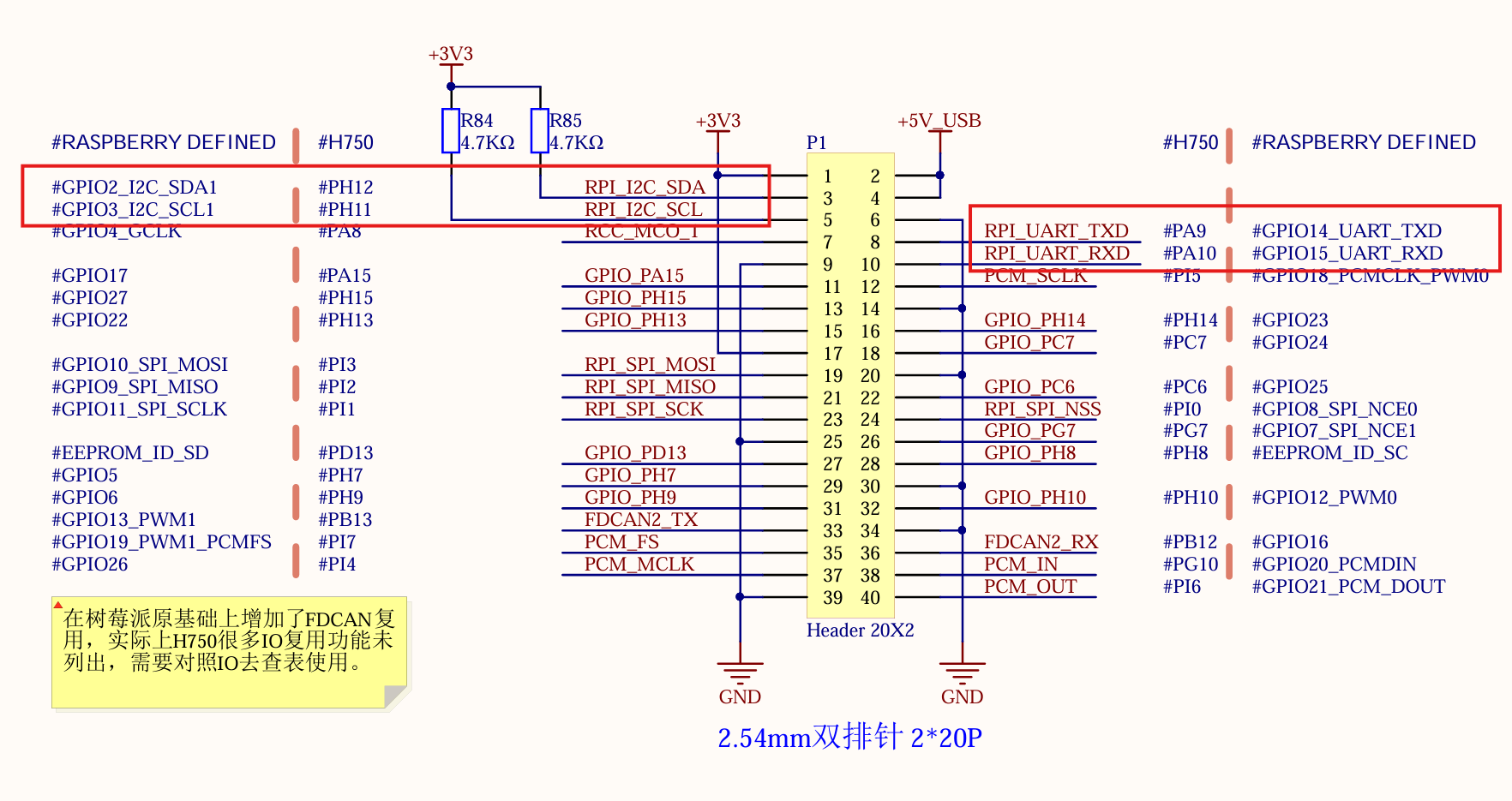
上图为连接的引脚,分别是SCL(H12)、SDA(H11)、INT(A9)、ENA(A10)。
方案说明
该传感器使用I2C即可完成配置和数据读取,因此可以使用任何带I2C接口的单片机或者SOC驱动。我因使用习惯选择了ART-Pi+rt-thread studio开发。
传感器工作模式我选择了3x3 Normal mode,9点作为原始数据。简单的做法可以以光学中心作为空间原点,分为X、Y两个方向单独做两次余弦定理算出平面夹角,然后以夹角算出距离。
但上述做法只使用了十字相交数据,当平面不在XY方向运动时就会测不出平面变化,经群里大佬解答,尝试使最小二乘法做平面拟合。
软件说明
驱动部分
软件I2C总线使用RTT标准驱动框架,然后跟着这位大佬分享的教程走TMF8821AM编程笔记。从上电到拿到测量数据基本能够走通,但是在官方资料中有说明,进行校准后可以得到更加准确的数据。具体参考自TMF882X_Host_Driver_Communication_AN001015_6中的4.4 Factory Calibration 。
其中的校准流程主要为开始校准->拿到校准参数 -> 写入参数-> 保存参数。至此完成校准。
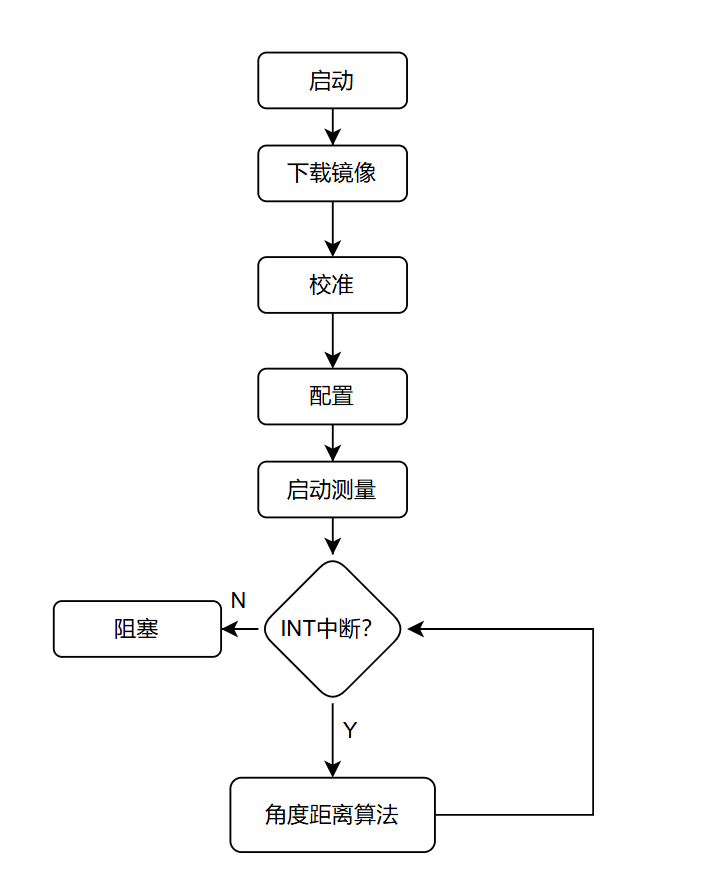
手册中提到关于一帧数据采集完成会拉低INT脚,因此我使用GPIO下降沿中断+释放信号量的方式来完成RTOS中的数据获取
算法部分
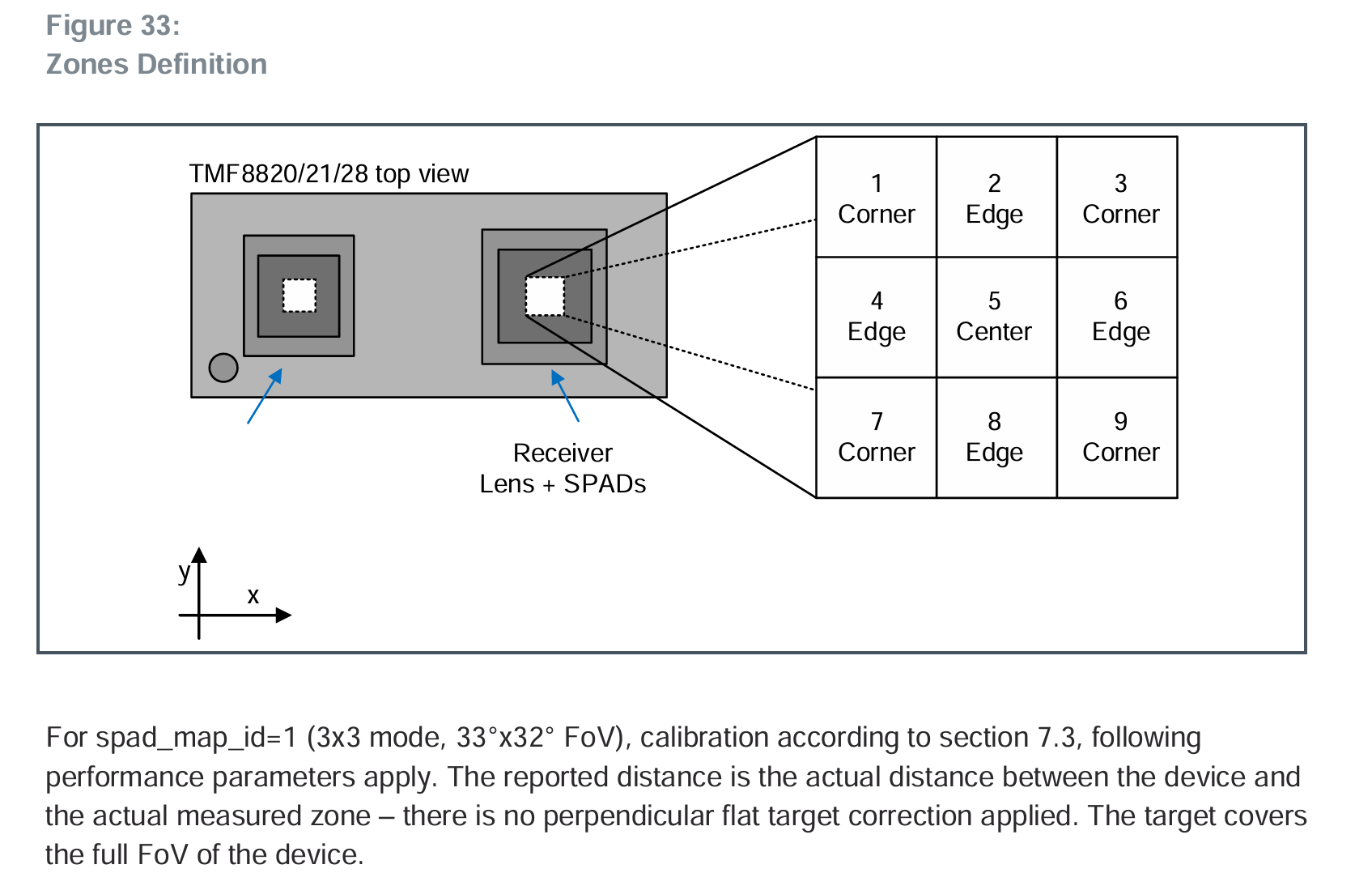
上图为spad_map_id = 1时的pads分布,可以清晰的看到其排列方式。
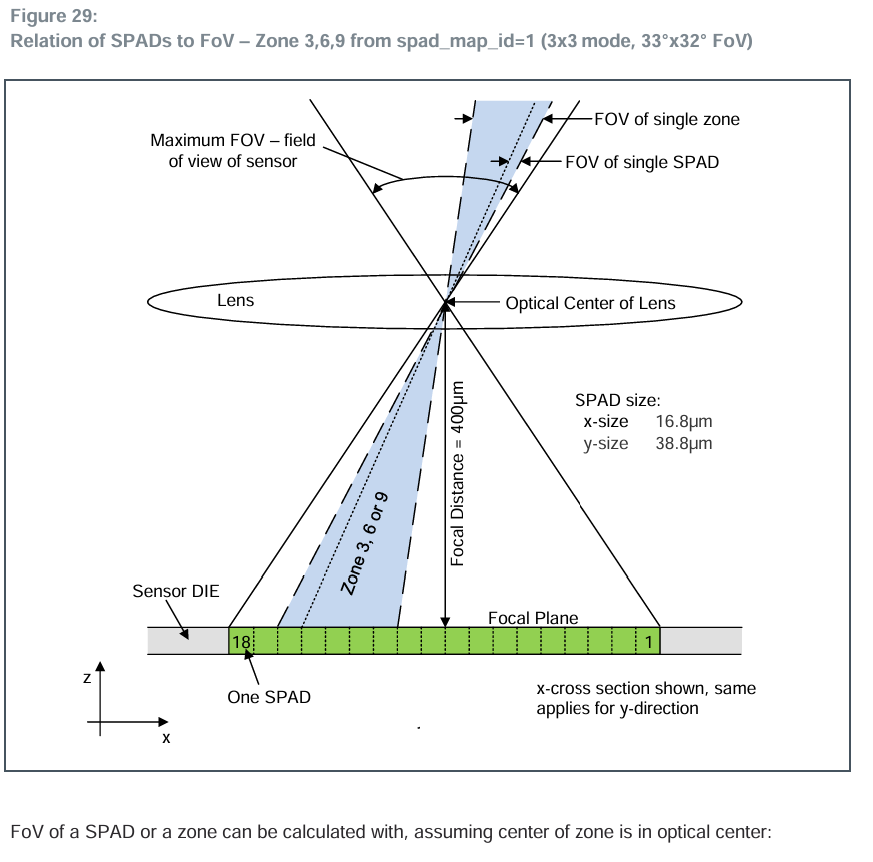
上图为实际的SPAD之间排列和结构。
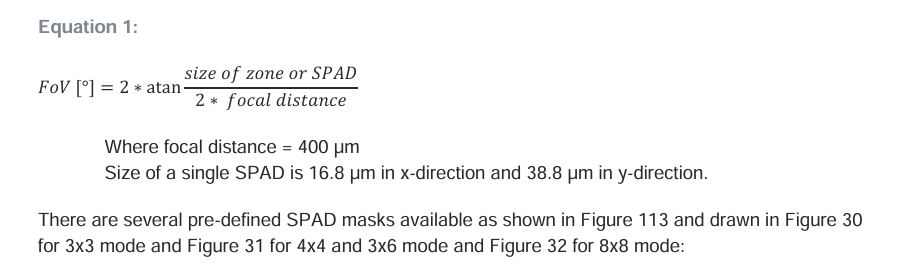
上图为计算SPAD角度的计算公式。后面的算法主要根据这三张图来进行。
方法一:余弦定理
c2=a2+b2−2abcosθc2=a2+b2−2abcosθ
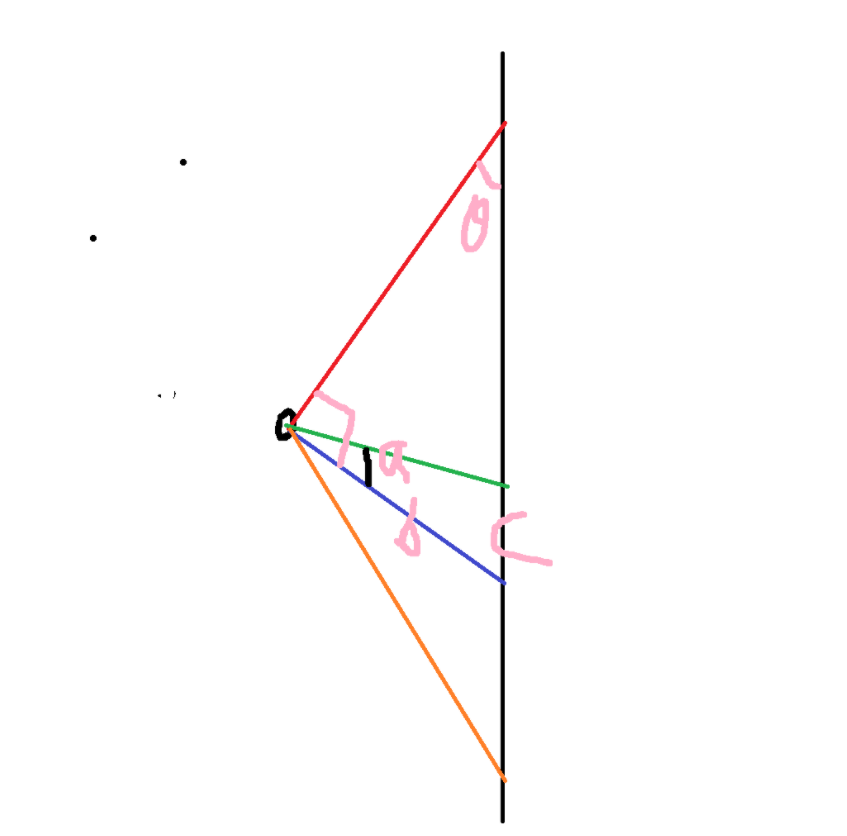
上图中的黑圈表示我们的传感器,线段a、b都是可以直接从原始数据中拿到的,角c也是已知的(可定为16度),这样就能用余弦定理算出c的长度,然后再用一次余弦定理就能算出角a,即求出平面夹角。
实现代码如下:
static double calculate_angel_distance(double a,double b,double angel_c)
{
double c_rad=PI*angel_c/180.0f;
double c= a*a+b*b-2*a*b*cos(c_rad);
c=sqrt(c);
double cos_A=(b*b+c*c-a*a)/(2*b*c);
cos_A =MAX(-1,MIN(cos_A,1));
double a_rad=acos(cos_A)* (180.0 / PI);
return a_rad;
}
方法二:最小二乘法
引用维基百科中的定义:最小二乘法(英语:least squares method),又称最小平方法,是一种数学优化建模方法。它通过最小化误差的平方和寻找数据的最佳函数匹配。
我们可以定义最小二乘平面拟合函数z=ax+by+c ,参考自最小二乘线性及平面拟合原理及C++实现 。直接将9个点的空间坐标带入其中,最后算出a、b、c ,得到平面方程,再使用法向量算出pitch角、roll脚以及距离。
实现代码如下:
// 最小二乘平面拟合函数 z=ax+by+c
int gFittingPlane(double *x, double *y, double *z, int n,
double *a, double *b, double *c) {
if (n < 3) {
rt_kprintf("error----\n");
return -1;
}
double sum_x = 0.0, sum_y = 0.0, sum_z = 0.0;
double sum_x2 = 0.0, sum_y2 = 0.0, sum_z2 = 0.0;
double sum_xy = 0.0, sum_xz = 0.0, sum_yz = 0.0;
// 计算累加和
for (int i = 0; i < n; ++i) {
sum_x += x[i];
sum_y += y[i];
sum_z += z[i];
sum_x2 += x[i] * x[i];
sum_y2 += y[i] * y[i];
// sum_z2 += z[i] * z[i];
sum_xy += x[i] * y[i];
sum_xz += x[i] * z[i];
sum_yz += y[i] * z[i];
}
// 构建系数矩阵
double coeff[3][3] = {
{sum_x2, sum_xy, sum_x},
{sum_xy, sum_y2, sum_y},
{sum_x, sum_y, n}
};
//xz, xy, x1, yz, y2, y1, z1, y1, n
double matrix_a[3][3] = {
{sum_xz, sum_xy, sum_x},
{sum_yz, sum_y2, sum_y},
{sum_z, sum_y, n}
};
//x2, xz, x1, xy, yz, y1, x1, z1, n)
double matrix_b[3][3] = {
{sum_x2, sum_xz, sum_x},
{sum_xy, sum_yz, sum_y},
{sum_x, sum_z, n}
};
//x2, xy, xz, xy, y2, yz, x1, y1, z1
double matrix_c[3][3] = {
{sum_x2, sum_xy, sum_xz},
{sum_xy, sum_y2, sum_yz},
{sum_x, sum_y, sum_z}
};
// 计算行列式
double det = gDeterm3(coeff);
det =det>0?det:-det;
rt_kprintf("det=%d\n",(uint32_t)(det*1000));
// 判断奇异性
if (fabs(det) < EPSILON) {
rt_kprintf("erro->\n");
return -1;
}
// 计算a的分子行列式
*a = gDeterm3(matrix_a) / det;
// 计算b的分子行列式
*b = gDeterm3(matrix_b) / det;
// 计算c的分子行列式
*c = gDeterm3(matrix_c) / det;
return 0;
}
运行
编译&下载
编译完成后,将开发板的 ST-Link USB 口与 PC 机连接,然后将固件下载至开发板。
运行效果
上电后,日志如图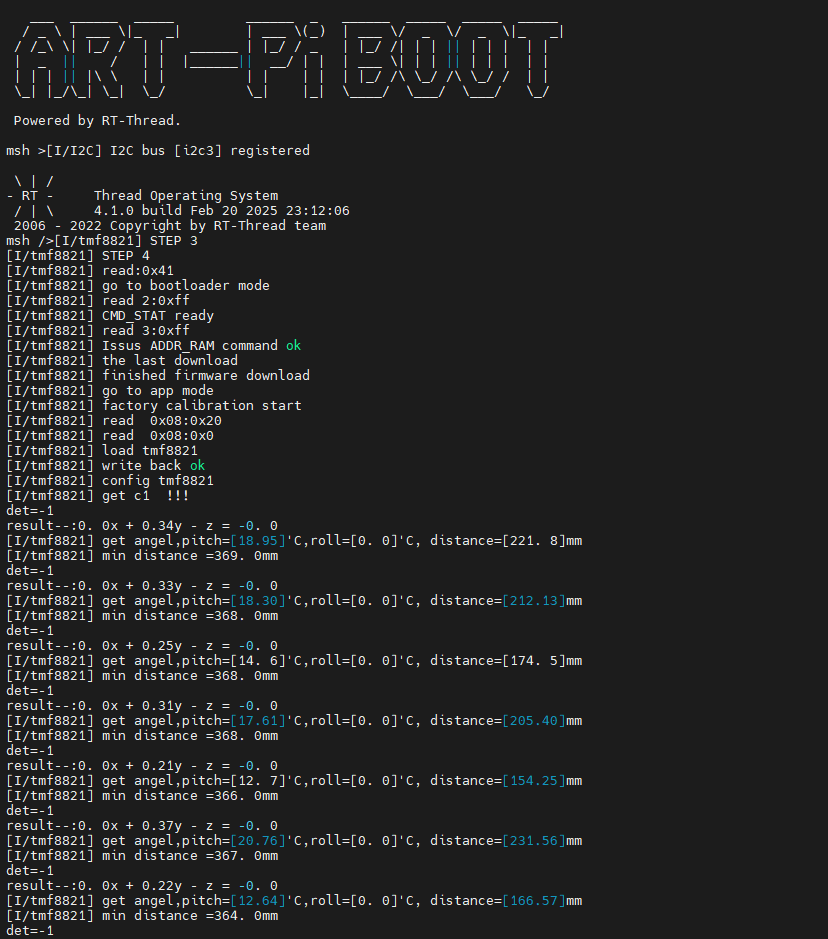
使用余弦定理计算如图
使用最小二乘法计算如图
心得体会
- 目前的角度计算做的效果还很不理想,暂时猜测是没有引入滤波和置信度比例,需要再去测试修正。
- dToF很强大,第一次用这么高级的传感器,希望多多发掘他的用途。
- 英文手册看的很吃力,要是没有群里大佬的教程可能早就放弃了。
- 这次活动认识到了自己的很多不足,给自己敲响了警钟,要补上这些不足。
- 感谢赞助商和硬禾带给我们这么好的活动。

