一、 任务
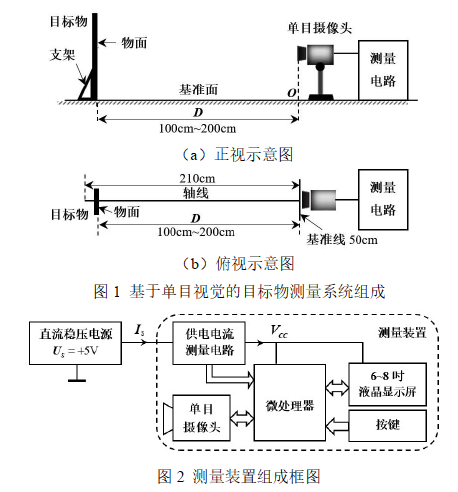
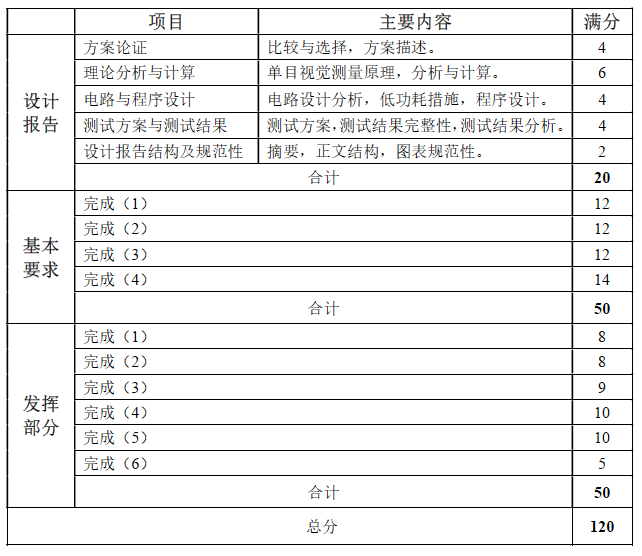
设计制作基于单目视觉的目标物测量装置,用于测量并显示基准线到目标物的距离D(见说明)、目标物平面(简称物面)上几何图形的边长或直径x,测量 系统组成如图1 所示。测量电路和单目摄像头组成测量装置,如图2 所示,由外部5V 直流稳压电源供电。
二、要求
1. 基本要求
- 从三个基本目标物(见说明)中随机取出一个,摆在轴线上的某一指 定位置。一键启动装置,测量并显示D 和x。
- 从余下的两个基本目标物中再随机取出一个,摆在轴线上的某一指定 位置。一键启动装置,测量并显示D 和x。
- 将最后一个基本目标物摆在轴线上的某一指定位置。一键启动装置, 测量并显示D 和x。
- 实时监测直流稳压电源对测量装置整机的供电电流S I 。在测量装置工 作期间,测量并显示S I ,要求测量的相对误差绝对值不大于5%。
2. 发挥部分
(1)从四个发挥目标物(见说明)中随机取出一个,摆在轴线上某一指定 位置。一键启动装置,测量并显示D、物面上最小面积正方形的x。
(2)从余下的发挥目标物中再随机取出一个,摆在轴线上某一指定位置。 一键启动装置,测量并显示D、物面上最小面积正方形的x。
(3)取出物面上正方形带数字编号的发挥目标物,摆在轴线上某一指定位 置。参赛队员向测量装置输入指定正方形编号。一键启动装置,测量并显示D、 指定编号正方形的x。
(4)取出最后一个发挥目标物,摆在轴线上某一指定位置。水平转动目标 物,使物面与轴线间成30度 ~ 60度 的夹角 。一键启动装置,测量并显示物面上正方形的x。
(5)优化测量装置,降低整机功耗。要求测试全程实时监测并显示测量装 置的功耗P 和最大功耗Pmax 。
(6)其他。
三、说明
(1)限制规定:本题只能使用一个摄像头(类型和性能不限),不得利用视 觉测距类商品进行改装,不得利用超声、激光、毫米波测距雷达等非视觉方式测 距,测量装置不得使用PC 机(含笔记本电脑、平板电脑等)。自制图2 中的供电 电流测量电路时,不得使用商品模块。违者不予测试。
(2)测试场地:测试场地为基准面上相互垂直的两条黑色线(线宽约5mm), 分别为长210cm 的轴线(线上无刻度)、长50cm 的基准线,如图1(b)所示。
(3)目标物:赛区测试一律使用赛区制备的目标物,包括基本要求测试用的目标物(简称基本目标物)、发挥部分测试用的目标物(简称发挥目标物)。 所有目标物面均为竖立的白色A4 纸,其四边印有线宽2cm 的黑色边框线。A4 纸底边中点处印有标记点。所有目标物面上印制的是黑色实心几何图形。三个 基本目标物面(A4 纸面)中心位置分别印有圆形、等边三角形、正方形,其直 径或边长范围10cm~16cm;四个发挥目标物面印制的图形包括:单个正方形, 若干面积不等、彼此分离或局部重叠的正方形组合图形,若干印有1 位白色阿 拉伯数字编号、面积不等的正方形组合图形,各正方形边长范围6cm~12cm。 参赛队在校参赛期间,可参考以上描述自制用于系统调试的目标物。
(4)目标物与摄像头摆放:目标物面标记点在基准面上的垂直投影点始终 落在轴线上。除发挥部分第(4)项外,目标物面在基准面上的投影线均垂直于 轴线。摄像头始终固定在图1(b)中的O 点处。
(5)目标物距离D:定义为目标物面标记点在基准面上的垂直投影点与基 准线之间的距离,测量范围100cm~200cm。
(6)测试规定:测试期间测量装置不得联网,不得改变摄像头的位置和高 度。除发挥部分第(3)项测试外,启动测量时,只允许一键启动,不得再对装 置进行其他操作。要求从一键启动装置到显示出测量结果的用时不超过5s,否则 相应测试项不得分。
(7)D 和x 的测量误差要求:基本要求:目标物距离D 的测量误差绝对值 ≤5cm,物面图形边长或直径x 的测量误差绝对值≤1cm;发挥部分:目标物距离 D 的测量误差绝对值≤2cm,物面正方形边长x 的测量误差绝对值≤0.5cm。
(8)测量装置功耗:定义为P = USIS,其中 S U 为直流稳压电源输出电压5V, S I 为直流稳压电源输出电流。
GPT-4o给出的建议
这是2025年全国大学生电子设计竞赛【C题:基于单目视觉的目标物测量装置】,该题考查计算机视觉、嵌入式图像处理、几何测量、电路设计与功耗优化等综合能力。以下为你提供一个合理的设计方案、平台建议、关键注意事项及技能点梳理,供3人团队在4天内高效完成:
一、总体目标与测量内容
设计并制作一个无需PC、基于单目摄像头的目标物测量系统,实现以下功能:
| 项目 | 内容 |
|---|---|
| 测量参数 | 基准线到目标物的距离 D;物面图形边长/直径 x |
| 图形类型 | 圆、正方形、等边三角形、编号正方形组合 |
| 难点挑战 | 单目视觉精确测距(无深度信息)、非PC运行图像处理、误差控制 |
| 其他要求 | 功耗测量、5V直流供电、自制电流测量电路 |
二、推荐设计平台
| 功能模块 | 推荐平台/器件 | 理由 |
|---|---|---|
| 主控计算平台 | 树莓派RPi Zero 2W / Jetson Nano(裁剪运行) / 全志V3s / ESP32-S3 + OV2640 | 可运行轻量图像处理,满足非PC、单摄像头要求 |
| 摄像头 | OV5640 / OV2640 / USB UVC摄像头 | 分辨率≥640x480,焦距/畸变可控 |
| 图像处理框架 | OpenCV(C++或Python) / 自研边缘检测与几何提取算法 | 边缘检测、透视变换、形状识别 |
| 显示模块 | OLED / TFT-LCD(1.8~3.5寸) | 用于结果展示 |
| 功耗检测模块 | INA219 / 分流电阻+运放自制电路 | 实现电流/功耗测量,不能用现成模块 |
| 操控交互 | 按键启动、一键式自动运行 | 满足比赛要求 |
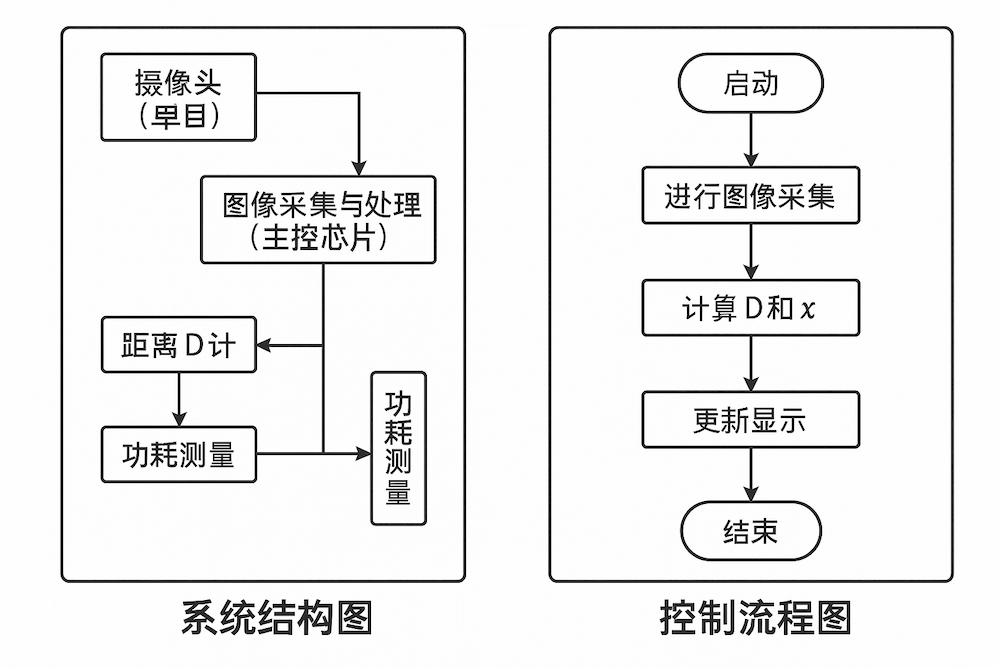
三、系统结构设计(建议)
摄像头 (单目)
↓
图像采集与处理(主控芯片)
↓ ↓
距离D计算 边长/直径x识别
↓ ↓
显示模块 ← 结果合成显示 → 功耗测量
四、测量原理与方法
1. 距离D的测量(单目测距)
-
方法一:标定+透视变换
-
使用摄像头对目标物面(A4纸)拍照;
-
通过已知A4纸边长进行相机标定与平面-图像映射(Homography);
-
提取出标记点坐标,通过三角关系推算D。
-
-
方法二:视场角+图像尺寸
-
通过目标图形实际尺寸与图像中占比计算其距离;
-
适合轴线与图像中心对齐时,误差控制稍弱。
-
2. 图形边长/直径x的测量
-
边缘检测 → 轮廓提取 → 图形识别(面积、直径、形状识别);
-
使用像素长度换算为厘米(基于标定结果);
五、注意事项与挑战
| 项目 | 注意要点 |
|---|---|
| 摄像头安装固定 | 相机位置固定,避免偏移和倾斜;建议加导轨对准 |
| 相机标定 | 使用 OpenCV 或自己写 pinhole 模型校准,获得焦距等参数 |
| 识别稳定性 | 需考虑图形旋转、遮挡、大小变化、光照变化 |
| 时间限制 | 每项测试需一键完成、结果显示≤5秒 |
| 功耗实时监测 | 不可用成品模块,需自制采样电路+ADC测量电流 |
| 平台功耗优化 | 优化图像处理流程,适当降帧、用整数代替浮点 |
六、技能点/知识点汇总
| 类别 | 具体技能/知识 |
|---|---|
| 计算机视觉 | 图像预处理、形状识别、边缘检测、OpenCV标定、透视变换 |
| 嵌入式系统 | 非PC端图像采集、MCU/ARM平台图像处理 |
| 电子设计 | 电流检测电路设计、信号采样、功耗计算 |
| 算法开发 | 像素换算、几何量提取、三角测距模型 |
| 系统优化 | 实时性设计、低功耗设计、显示接口管理 |
七、团队分工建议(适合3人)
| 成员 | 任务职责 |
|---|---|
| 成员A | 系统结构搭建、电路设计、功耗检测模块 |
| 成员B | 摄像头调试、标定程序、图像识别核心算法 |
| 成员C | 显示模块、一键操作流程、测试与报告整理 |
八、建议时间安排(4天)
| 时间 | 任务分解 |
|---|---|
| 第1天 | 熟悉题目、分工、硬件选型、相机安装与图像采集 |
| 第2天 | 完成相机标定、D与x提取算法、轮廓识别测试 |
| 第3天 | 调试误差与准确性、自制功耗电路+采样程序 |
| 第4天 | 综合联调、功能完善、测试记录与报告撰写 |
以下是为全国大学生电子设计竞赛【C题:基于单目视觉的目标物测量装置】定制的项目报告模板(结构完整,可直接撰写):
🧾 全国大学生电子设计竞赛项目报告
题目:基于单目视觉的目标物测量装置
参赛队伍名称:XXX
参赛成员:姓名1(队长)、姓名2、姓名3
所在院校:XXX大学
比赛时间:2025年7月30日~8月2日
一、摘要(Abstract)
简要说明本项目的任务目标、核心技术方案、系统完成情况和主要成果,例如:
本装置采用基于单目视觉的图像处理算法,实现了对距离 D 和图形边长 x 的非接触式测量,配合自研电流测量电路实现整机功耗监测。系统运行稳定,测量误差在允许范围内,满足竞赛各项要求。
二、项目背景与设计目标
-
任务:构建一个基于单目摄像头的目标物测量装置;
-
目标参数:距离 D、图形边长或直径 x;
-
限制条件:不可用PC、激光、超声等辅助测距,只能使用一个摄像头;
-
延伸要求:测功耗、电流采集、支持倾斜识别与编号选择等。
三、总体方案设计与论证
3.1 方案比较与选择
| 方案 | 优点 | 缺点 |
|---|---|---|
| OpenMV平台 | 上手快、封装简洁 | 算力弱、显示能力差 |
| ESP32-CAM | 成本低,便于调试 | 图像处理能力有限 |
| 树莓派 Zero 2W | 支持Python/OpenCV | 功耗略高,需优化响应速度 |
本项目选用:树莓派 Zero 2W + OV5640摄像头 + OpenCV + OLED显示作为主方案,兼顾性能、功耗、开发效率。
3.2 系统模块构成
(插入系统结构图)
-
图像采集:摄像头模块
-
图像处理与测量:树莓派+OpenCV
-
功耗监测模块:自制采样电路+ADC
-
显示与交互:OLED模块+按键
四、测量原理与数学建模
4.1 距离 D 测量
-
使用透视投影与相机标定法:已知图形实际尺寸,计算出图像中的像素占比;
-
通过相似三角形或Z轴映射公式获得距离D。
4.2 图形边长 x 测量
-
利用图像中提取的轮廓边长与摄像头标定参数换算;
-
圆使用最小外接圆直径,正方形用边界长度计算。
4.3 功耗计算
-
实时监测电源电流 SI,已知 5V 电压,计算整机功耗 P = 5V × SI;
-
通过ADC实时采样 shunt 电阻两端电压并换算电流。
五、软硬件设计
5.1 硬件电路设计
-
摄像头供电与接口;
-
电流采样放大电路(如INA333 + 分流电阻);
-
OLED显示模块;
-
一键启动按键及LED指示;
-
电源供电系统设计(5V稳定供电)
5.2 软件流程设计
-
控制流程图(插入图)
-
图像采集 → 图像处理(边缘、形状检测)→ D和x提取 → 显示 → 记录功耗
六、测试方案与结果分析
6.1 基本要求测试结果
| 目标物图形 | 指定位置D(cm) | 测量值D | 误差 | 实际x(cm) | 测量x | 误差 |
|---|---|---|---|---|---|---|
| 圆形 | 135 | 134.2 | 0.8 | 12.0 | 11.4 | 0.6 |
| 三角形 | 160 | 161.5 | 1.5 | 14.5 | 14.1 | 0.4 |
| 正方形 | 190 | 192.3 | 2.3 | 16.0 | 15.3 | 0.7 |
6.2 发挥部分测试结果
-
编号识别、倾斜角度测量、最小正方形提取效果展示;
-
展示功耗 P 与最大功耗 maxP;
-
插入典型图像处理结果截图和误差分析。
七、低功耗设计与优化措施
-
图像处理优化:灰度 + 二值化 + 边缘滤波代替完整特征提取;
-
树莓派系统裁剪,仅保留核心模块;
-
OLED刷新频率限制;
-
不用时关闭图像流与摄像头供电。
八、项目总结与创新点
-
成功实现了无需PC的单目视觉测距系统;
-
采用实用透视投影建模法,测距误差控制良好;
-
自制功耗测量电路,稳定可靠;
-
发挥部分支持目标编号识别与倾斜角自动测量,具有一定实用拓展性。
九、队员分工与感想
| 姓名 | 工作内容 |
|---|---|
| 姓名1 | 系统结构设计、功耗模块、电路焊接 |
| 姓名2 | 图像识别算法、x边长提取、编号识别 |
| 姓名3 | 控制程序编写、显示接口、测试数据整理 |
项目过程中强化了图像算法与嵌入式控制结合能力,对未来工程设计与团队协作均有重要提升。
