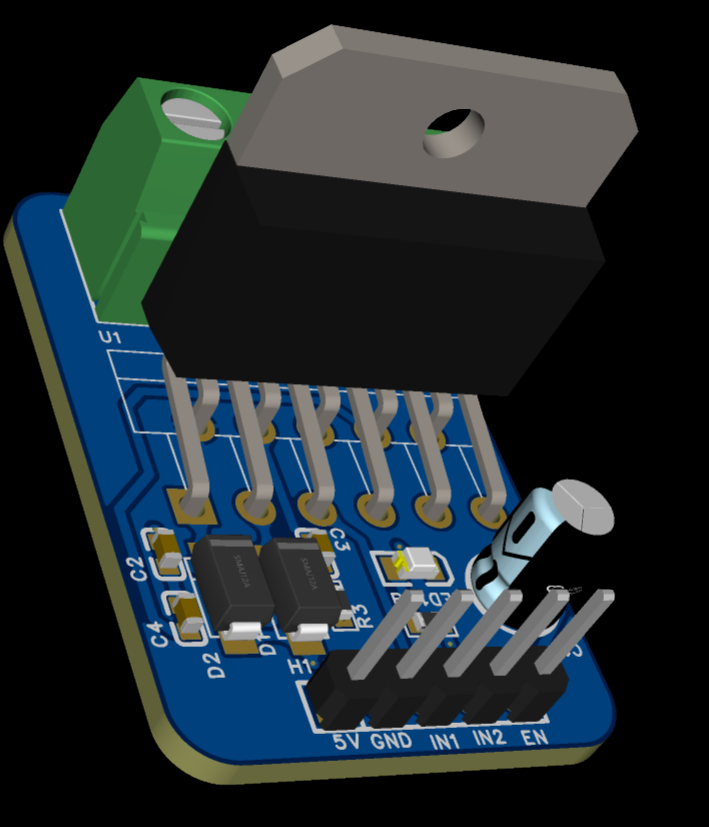
一、项目概述
为满足中小型直流有刷电机的高性能驱动控制需求,本项目以ST官方L6203单通道全桥H桥驱动芯片为核心,自主设计并开发一款通用性强、耐压等级高、带过压过流保护的专用电机驱动模块。本模块可实现直流电机正转、反转、短路制动、高阻停机四种基础工作模式,同时支持高精度PWM无级调速功能。
L6203驱动芯片具备宽电压工作范围、大电流输出、集成保护电路等优势,最高支持48V电机供电电压,峰值输出电流可达4A,能够适配各类中小型直流减速电机。该模块可广泛应用于智能竞速小车、嵌入式机器人底盘、电动云台、小型自动化执行机构等机电一体化开发场景,具备极高的项目适配性与实际应用价值。
二、核心器件选型说明
本项目硬件器件均选用行业主流、采购便捷、性能稳定的商用元器件,所有核心器件均可在DigiKey官方平台直接采购,货源稳定、规格齐全,能够保障项目批量制作与后期迭代优化。具体器件参数明细如下表所示:
表格
器件型号 | 类型 | 关键参数 | DigiKey 采购链接 |
L6203 | 全桥H 桥电机驱动 IC | 单通道全桥驱动,最大工作电压48V,峰值输出电流 4A,内置续流二极管,支持正 / 反转 / 制动控制与 PWM 调速 | https://www.digikey.cn/zh/products/detail/stmicroelectronics/L6203/585942 |
SS34 | 肖特基二极管 | 40V/3A,用于自举电路续流 | https://www.digikey.cn/zh/products/detail/onsemi/SS34/1052384 |
3.1 整体架构划分
结合L6203芯片工作原理与电机驱动系统设计规范,本次驱动模块硬件电路整体划分为四大功能单元,各单元相互配合、独立分工,从供电、控制、辅助、输出多维度保障模块稳定运行,整体架构清晰、抗干扰能力优异:
- 电源供电单元:分为逻辑电源与电机主电源,分别为芯片内部控制电路、外部驱动电机提供稳定供电;
- 控制信号输入单元:接收主控MCU下发的电平信号与PWM调速信号,完成电机工作模式指令解析;
- 自举续流辅助单元:依托自举电容与肖特基二极管,为高端MOS管提供驱动电压,辅助H桥电路正常导通;
- 电机驱动输出单元:通过芯片H桥功率回路,将弱电控制信号转化为强电驱动信号,直接驱动直流电机运转。
3.2 电机控制逻辑
本模块通过IN1、IN2两个控制引脚的高低电平组合,切换内部H桥导通路径,以此实现电机四种工作状态;PWM调速功能依托单通道引脚输入脉冲信号,通过调节信号占空比,改变电机两端平均电压,实现无级调速。具体控制逻辑如下表:
IN1 状态 | IN2 状态 | 电机工作模式 | 说明 |
|---|---|---|---|
高电平 | 低电平 | 正转 | 电流从 OUT1 流向 OUT2 |
低电平 | 高电平 | 反转 | 电流从 OUT2 流向 OUT1 |
低电平 | 低电平 | 制动停止 | 电机两端短接,实现快速制动 |
高电平 | 高电平 | 高阻停止 | 电机两端浮空,自由停止 |
3.3 核心细分电路设计
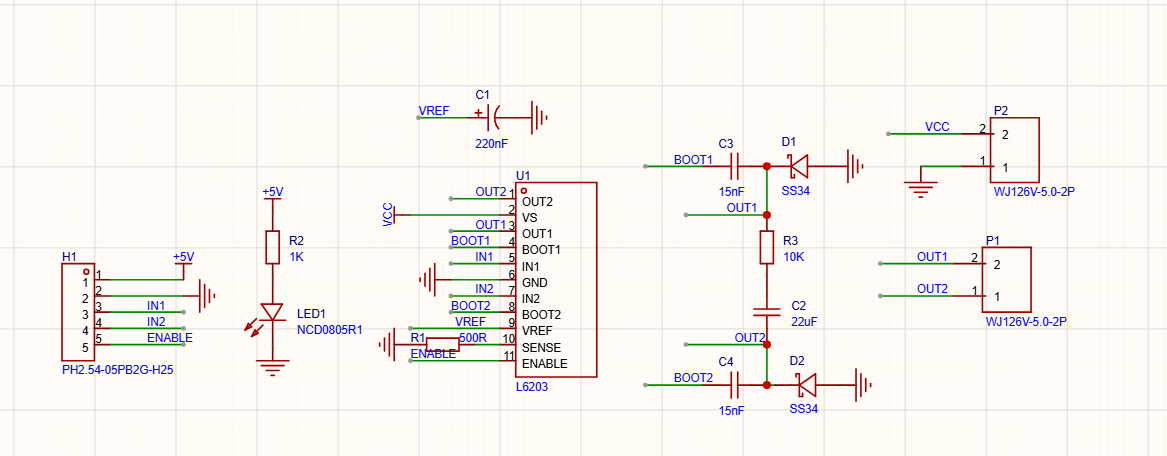
3.3.1 自举驱动电路
L6203内部桥臂全部采用N沟道MOS管,相较于P沟道MOS管,N沟道方案成本更低、导通损耗更小,但高端桥臂需额外配置自举电路提供栅极驱动电压。本设计为上下两路桥臂分别配置15nF专用自举电容(C3、C4)与SS34肖特基二极管(D1、D2),搭建完整充电回路。
电路充电流程:外部5V逻辑电源→SS34续流二极管→自举电容储能→桥臂输出端→系统公共地。该电路可稳定为高端MOS管提供压差,保障桥臂正常导通,是模块电机驱动的核心辅助电路。
3.3.2 电流检测与基准电压电路
为实现过流保护功能,模块在芯片SENSE电流检测引脚串联500mΩ高精度采样电阻(R1),利用电流-电压转换原理,将回路电流转化为可被MCU采集的模拟电压信号,实时监测电机工作电流,有效规避电机堵转、负载过载引发的硬件损坏问题。
同时在VREF基准电压引脚外接220nF滤波电容(C1),滤除供电杂波与高频干扰,稳定芯片内部基准电压,提升驱动信号输出精度,降低电机转速波动。
3.3.3 电源与状态指示电路
模块电源分为双供电体系:VS引脚接入6~48V高压电源,为驱动电机供电;5V逻辑电源为芯片内部控制单元、自举电路、指示灯电路供电。芯片ENABLE为模块总使能引脚,低电平触发工作,主控MCU可通过该引脚远程启停模块,适配自动化控制系统。
板载0805封装红色电源指示灯,串联1KΩ限流电阻,接入5V逻辑电源,模块上电后指示灯常亮,直观反馈供电状态,便于研发人员快速排查硬件故障。
3.4 模块接口定义
3.4.1 控制信号输入接口(H1:PH2.54-05PB2G-H25)
引脚号 | 引脚标识 | 功能说明 |
|---|---|---|
1 | +5V | 控制电路供电,为芯片逻辑部分供电 |
2 | GND | 公共地,需与 MCU 控制端共地 |
3 | IN1 | 电机控制信号输入 1,与 IN2 配合实现正 / 反转 / 停止控制 |
4 | IN2 | 电机控制信号输入 2,与 IN1 配合实现正 / 反转 / 停止控制 |
5 | ENABLE | 芯片使能信号,低电平有效,拉低时模块工作 |
3.4.2 电源与电机输出接口
端子 | 引脚标识 | 功能说明 |
|---|---|---|
P2 | VCC/GND | 控制电路 + 5V 电源输入与地 |
P1 | OUT1/OUT2 | 电机驱动输出,连接直流有刷电机两端 |
四、模块核心性能指标
参数项 | 规格说明 |
|---|---|
驱动芯片 | L6203 全桥 H 桥电机驱动 IC |
通道数量 | 1 路独立 H 桥通道 |
电机电源电压 | 6V~48V DC |
逻辑电源电压 | 5V DC |
最大输出电流 | 4A(峰值),3A(连续) |
控制方式 | 正转 / 反转 / 停止 / 制动控制,支持 PWM 调速 |
控制信号电平 | 兼容 3.3V/5V MCU GPIO 输出 |
保护机制 | 内置过流、过热、欠压保护 |
控制接口 | 2.54mm 间距标准排针 |
电源 / 电机接口 | 5.0mm 间距接线端子 |
五、设计要点与调试方案
5.1 自举电路设计要点
自举电路是本模块设计重中之重,电容容值、二极管选型直接决定高端桥臂能否正常工作。设计与焊接过程中,必须严格选用15nF高频专用自举电容与SS34肖特基二极管,且元器件需就近BOOT引脚布局,缩短走线长度,减少线路损耗;若电路配置错误,将直接导致高端MOS管无法导通,电机无响应。
5.2 电源系统优化要点
直流电机启动、堵转瞬间会产生瞬时大电流,易造成供电电压波动、杂波干扰。设计时需在VS主电源引脚旁并联大容量电解滤波电容,抑制电压尖峰;同时外接电源需预留1.2倍以上电流余量,避免因供电不足导致电机转速异常、芯片反复重启。
5.3 过流保护调试要点
500mΩ采样电阻可实时采集回路电流,研发人员可结合主控MCU,设定阈值电压。当采样电压超出预设范围时,立即拉低ENABLE引脚闭锁模块输出,切断电机供电,以此实现软硬件双重过流保护,从根源上规避硬件烧毁风险。
5.4 散热优化要点
L6203芯片大电流工况下会产生工作温升,长时间满负载连续输出时,热量会持续累积,极易触发内置过热保护。实际使用场景中,建议为芯片加装小型铝制散热片,增强被动散热能力,保障模块能够长期稳定运行。
六、项目总结
本次项目完成了基于L6203芯片的单通道直流有刷电机驱动模块全套设计工作,涵盖器件选型、电路原理图绘制、功能电路优化、接口定义、调试方案制定等完整开发流程。所设计模块支持6~48V宽电压供电,具备大电流输出能力与多重安全保护机制,同时集成自举续流、电流采样、状态指示等附加功能,整体稳定性、兼容性、安全性远超同类型基础驱动模块。
模块采用标准化接口设计,可直接适配STM32、ESP32、Arduino等市面上主流嵌入式主控,能够快速落地至智能小车、机器人、电动云台等各类机电项目。本次设计不仅熟练掌握了H桥驱动芯片的工作原理、自举电路设计逻辑与PCB布局布线技巧,同时积累了高压大电流驱动电路的调试经验,为后续复杂运动控制系统、多通道驱动模块的研发奠定了扎实的理论与实践基础。

