Hackaday上的项目汇总-移动机器人的相关项目
收藏
分享
脑图

描述:西方观众可能不知道MIK CA80实际上是什么,它对整个一代的爱好者和年轻的电子工程师有什么影响,在八十年代末和九十年代初期成长和掌握技能。 我认为它可以被称为那个时代的波兰覆盆子Pi。设备由StanisławGardynik设计,作为教育设备,旨在用于教授微电子和编程。 缺乏典型的键盘或字符显示是故意的。 该设备的创建者希望将用户的注意力集中在微型计算机的低级内部工作上。 因此该设备配备了十六进制键盘和七段显示器,接口类似于KIM-1系统中使用的接口。
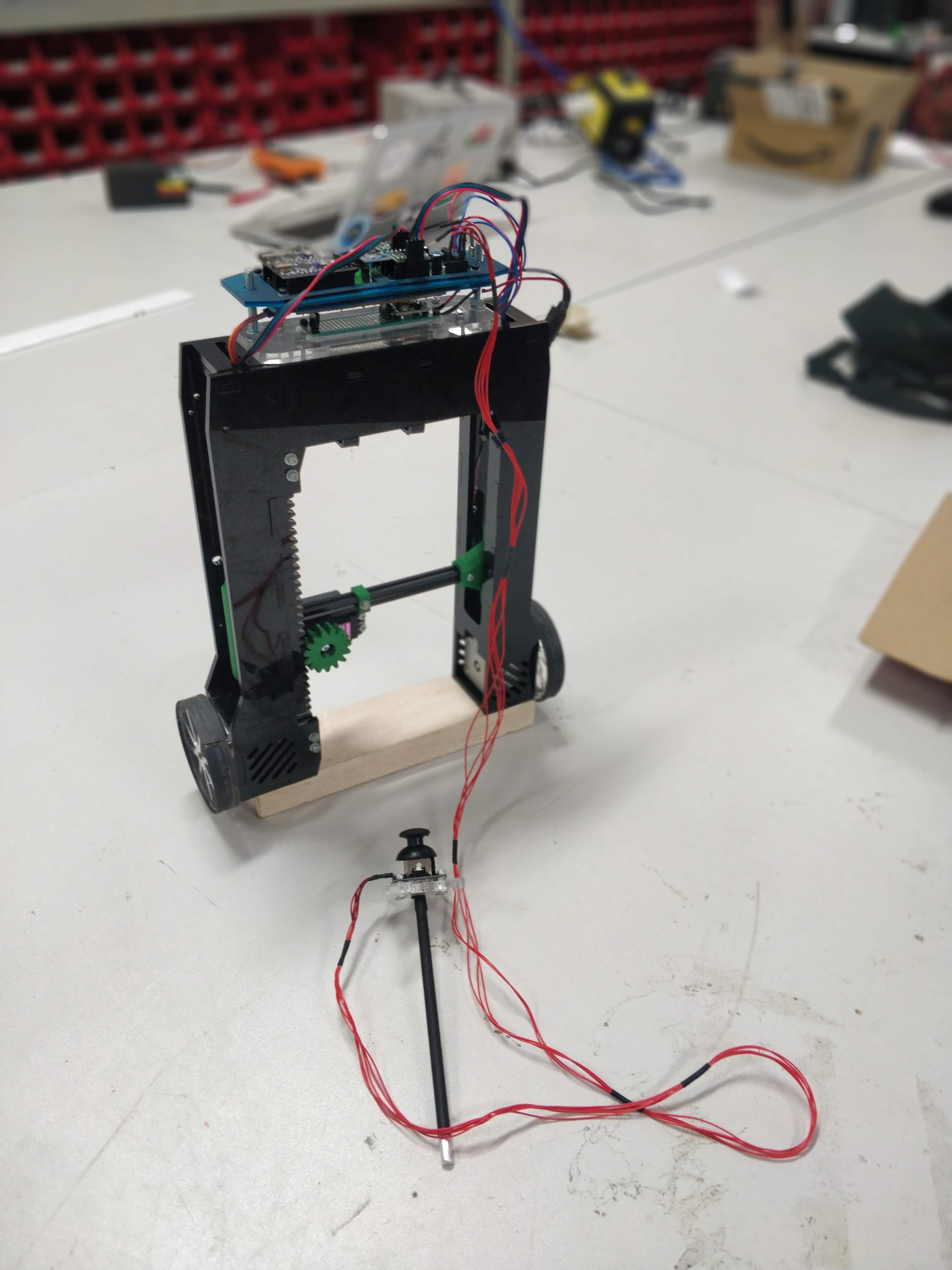
描述:我想为我的最后一年的univertsity项目做一些实用,具有挑战性和教育性的事情。 我对控制工程或电子设备的实际方面知之甚少,但我的灵感来自于其他黑客/制造商在youtube上使用这种类型的机器人管理的东西。 在我的背景研究阶段,我注意到许多自平衡机器人没有达到实际目的; 他们很酷。 因此,我的目标是调整现有的开源项目,并制作一个自平衡的起重机式机器人。 该项目于2018年9月启动,目标是在2019年4月完成。目前正在努力使该页面与控制脚本文件,电路图,照片和视频保持同步......
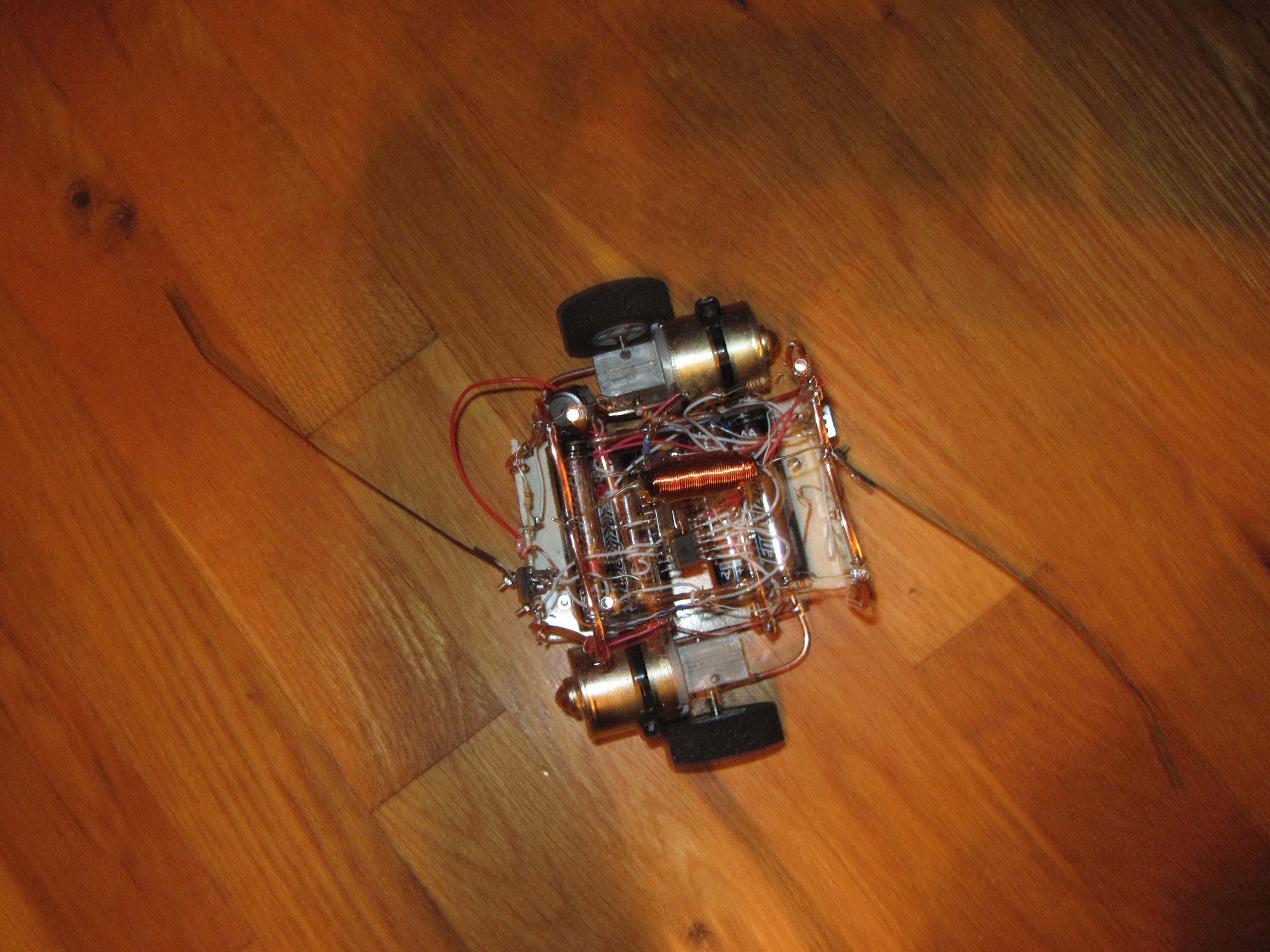
描述:在艺术和电子产品中,灵感可以来自许多不同的来源。 对于UBIRS,我从细菌中获取灵感。 虽然我们大多数人都试图避免一般的细菌,但这些小小的生物仍然很迷人。 微小,简单的单细胞生物,捕食和复制:我想我可以使用它。 虽然UBIRS无法复制......至少现在还没有,它可以搜索光线并避开物体。 UBIRS旨在尽可能简单。 两个蜗轮减速电机,每个都设计为仅在一个方向上运行。 当机器人以旋转方式移动时,这产生了一种新颖的运动形式,因为两个光电阻器确定最亮光的方向。 如果两个碰撞传感器中的任何一个检测到物体,则UBIRS进入其恐慌模式,快速闪烁其LED,并尝试绕过该物体。
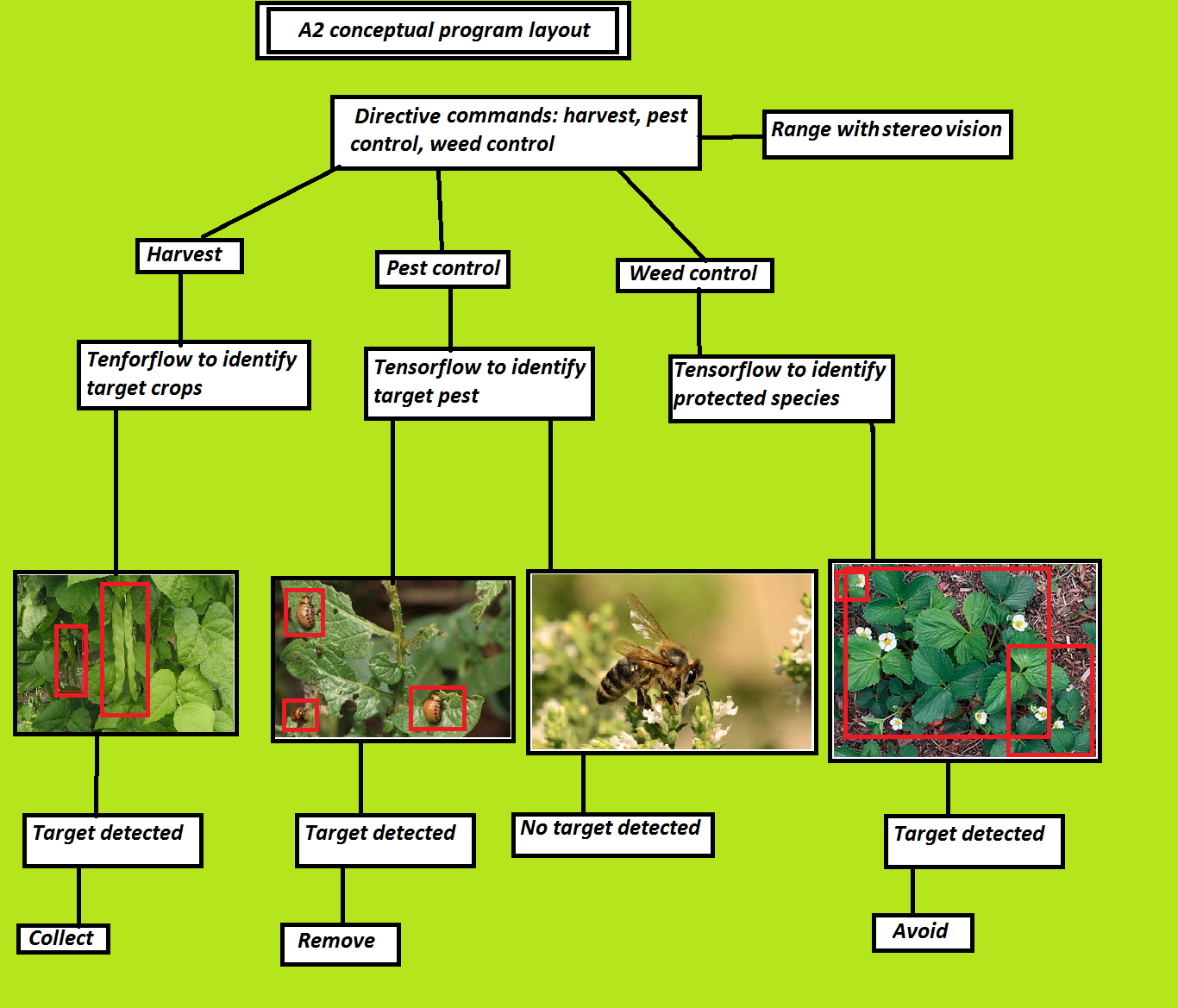
描述:Anna2是一款农业机器人,采用Raspberry Pi 3 B型和低成本组件构建,使其成为经济的劳动力来源。 OpenCV和深度神经网络模型将用于构建先进的视觉系统。
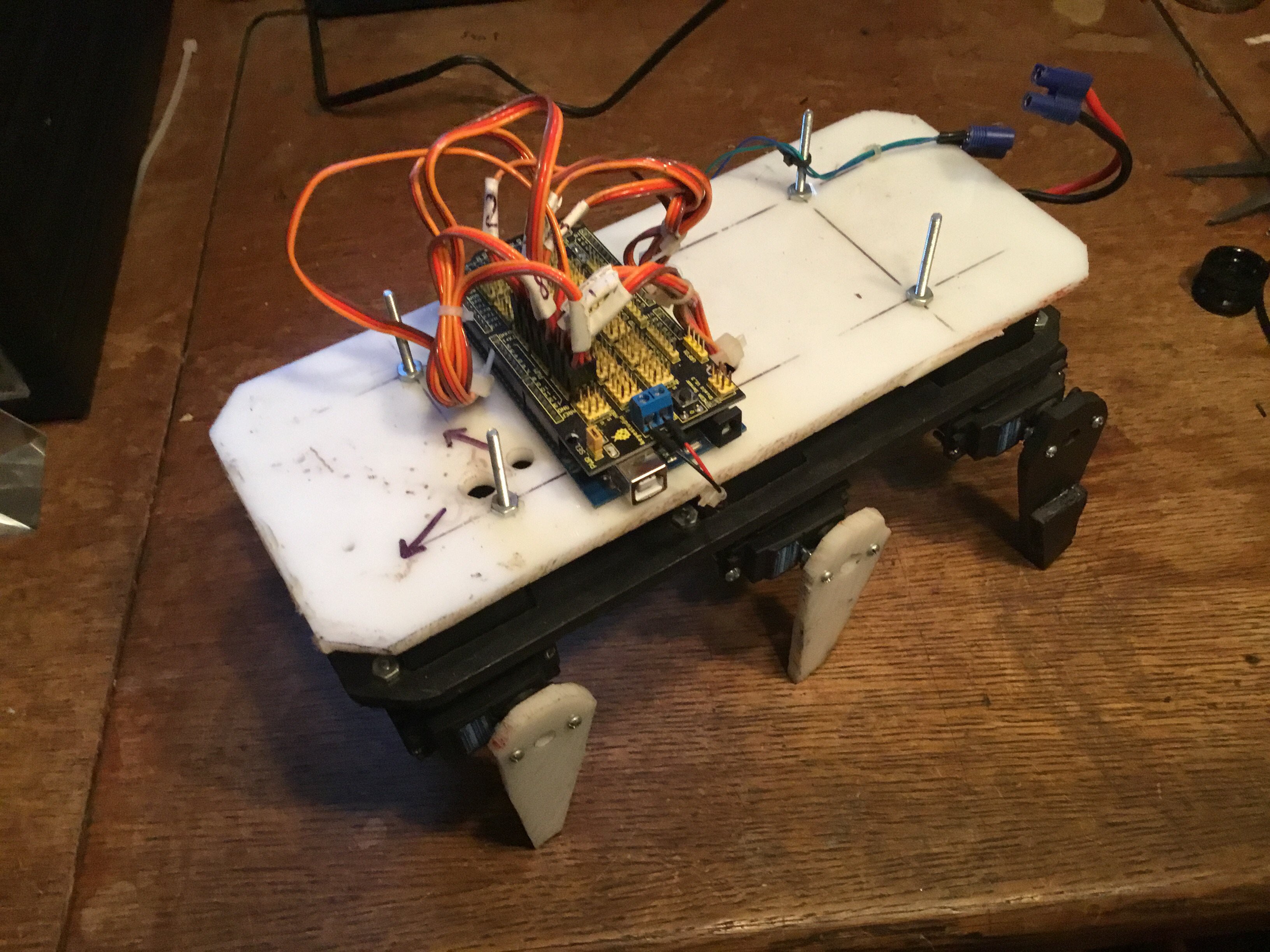
描述:最近我加入了Hackaday,当我了解到你可以上传你自己的项目时,我抓住了上传我的六足机器的想法。 它的重量应为3磅左右,配备12个金属齿轮伺服系统。 这个想法是通过红外遥控器控制它,或者通过超声波传感器和叶片开关自动控制它。
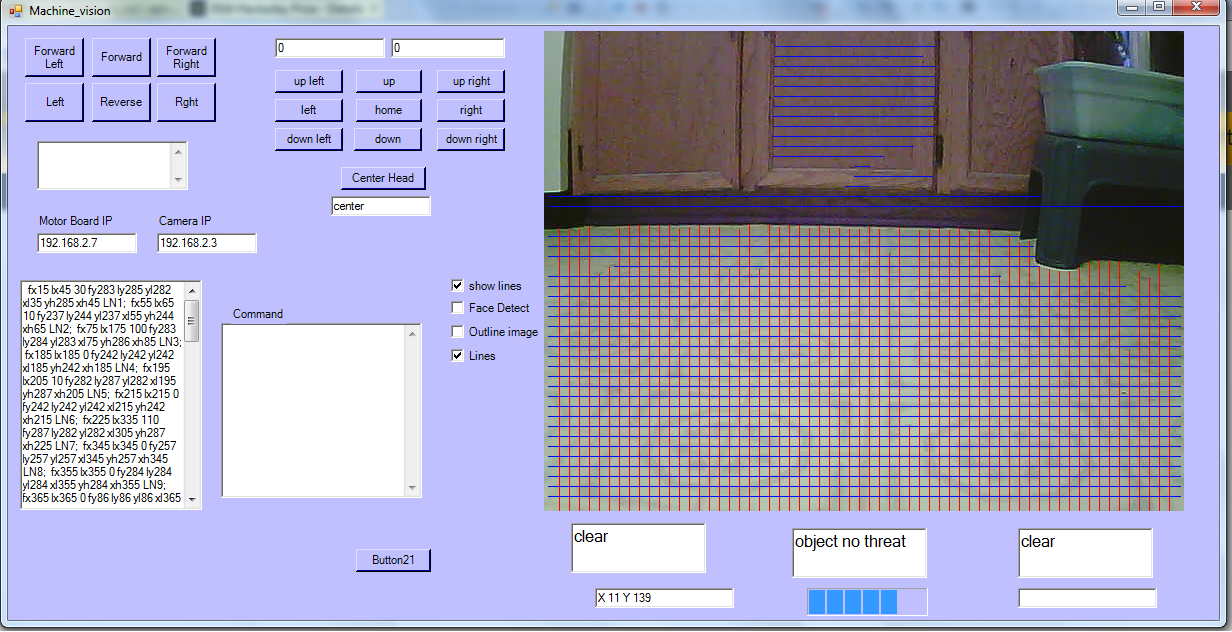
描述:个人机器人一直是个梦想。 凭借现代计算机,机器视觉和WIFI机器人的强大功能,现在是时候开展一个项目,不仅可以执行一项自动化任务,而且可以扩展以执行许多任务。

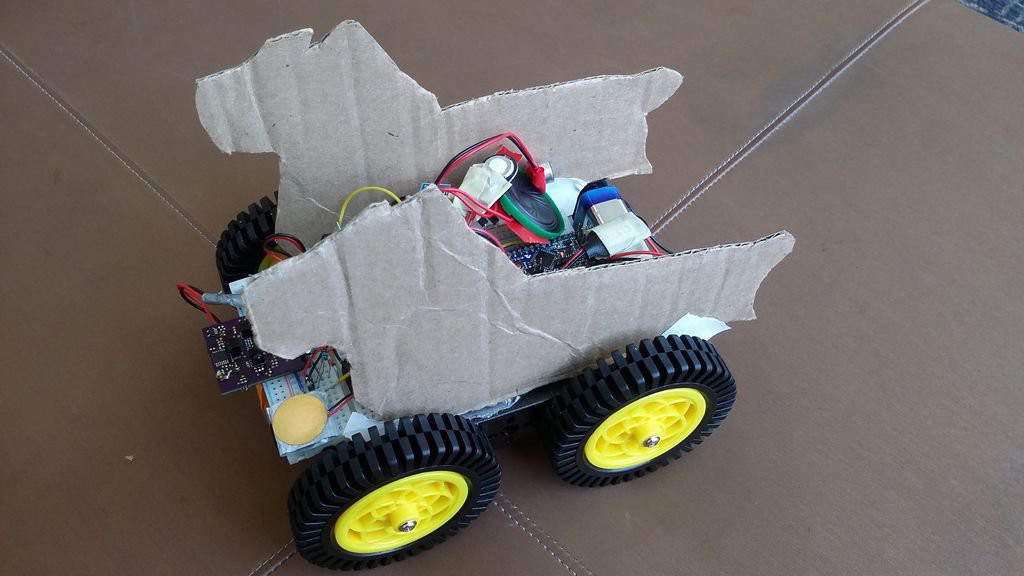
描述:该项目的主要目标是构建一个能够在崎岖地形中移动和收集数据的移动机器人。 这样的机器人可以用来巡逻你家周围的环境或难以到达和危险的地方。 该项目面向所有希望以合理价格构建可靠移动机器人的黑客和制造商。
描述:比特RoboDawg在3个基点(北,东和西)使用红外发射器和红外光电二极管对来确定它应该移动的方向。 用户将IR发射器(BitBeacon)连接到它们的背面,Bit检测光源并跟随它。 我们还想添加诸如come和stop之类的语音命令来覆盖BitBeacon信号。 但这些只是很好的功能。 :)比特将被证明是黑客的完美家庭机器人狗。

描述:这种机械宠物可以四处游荡并与人类主人互动。 她可以旅行75分钟,找到她的充电站,并在不到8分钟内填写(超级电容器用于储能)。 她说话,追球,停止或改变方向,而不是撞到她的伙伴青蛙身上。
使用电容器作为能源使这个自由漫游机器人可以在90%的时间内使用; 电池供电的机器难以匹配的可用性。
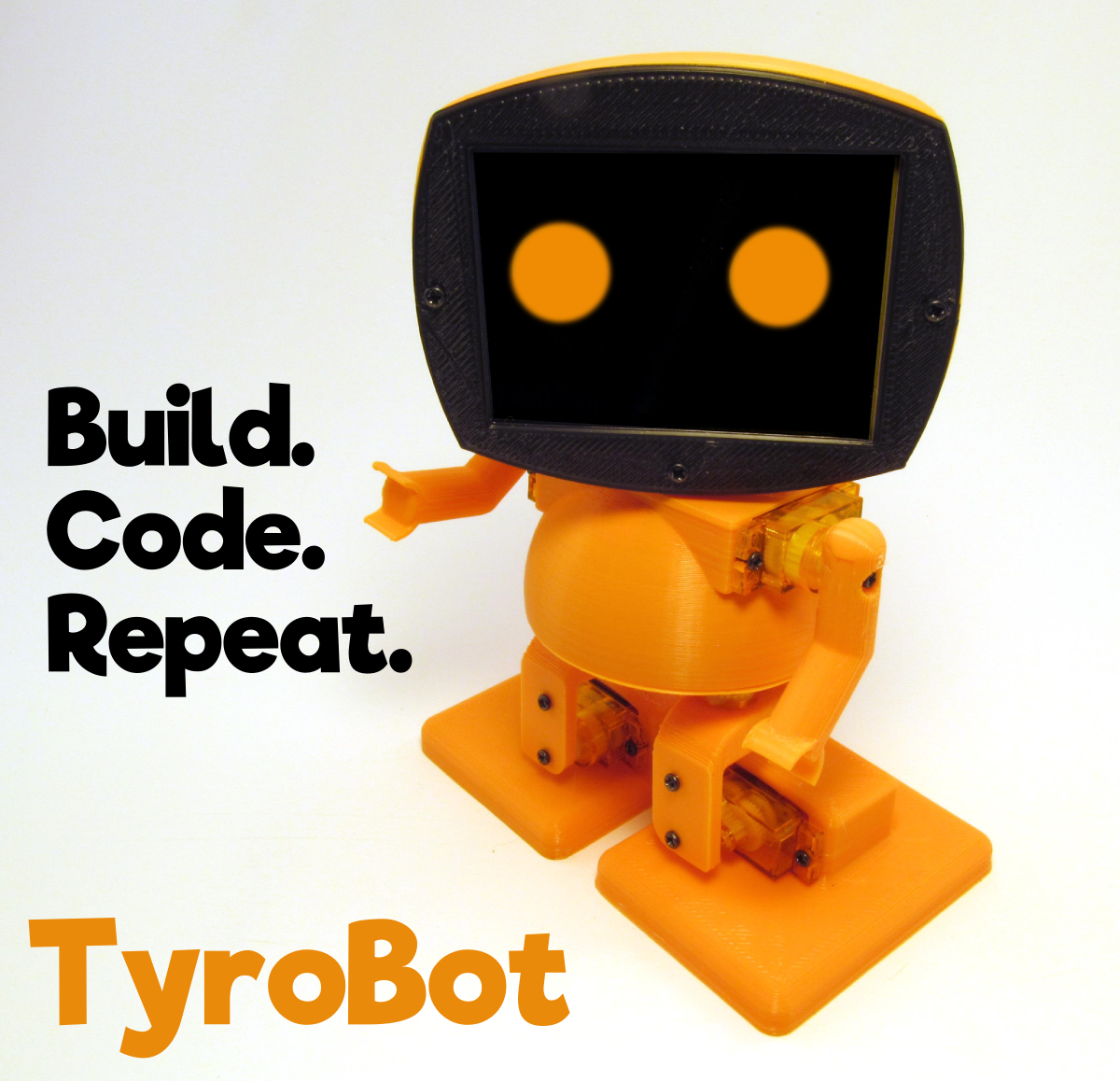
描述:学习构建和编程机器人既不容易也不便宜。 TyroBot旨在改变这种状况。 TyroBot是一款功能齐全的人形机器人,采用廉价的SG90伺服系统,可在最小的床上打印的3D打印部件,以及使用低成本ATSAMD21 32位处理器,esp8266 WiFi模块,3轴加速度计,电池充电器的控制器板, 和2.8英寸TFT触摸屏。 TyroBot可以在他的触摸屏面上进行编程,也可以使用特殊库通过Arduino IDE进行编程。
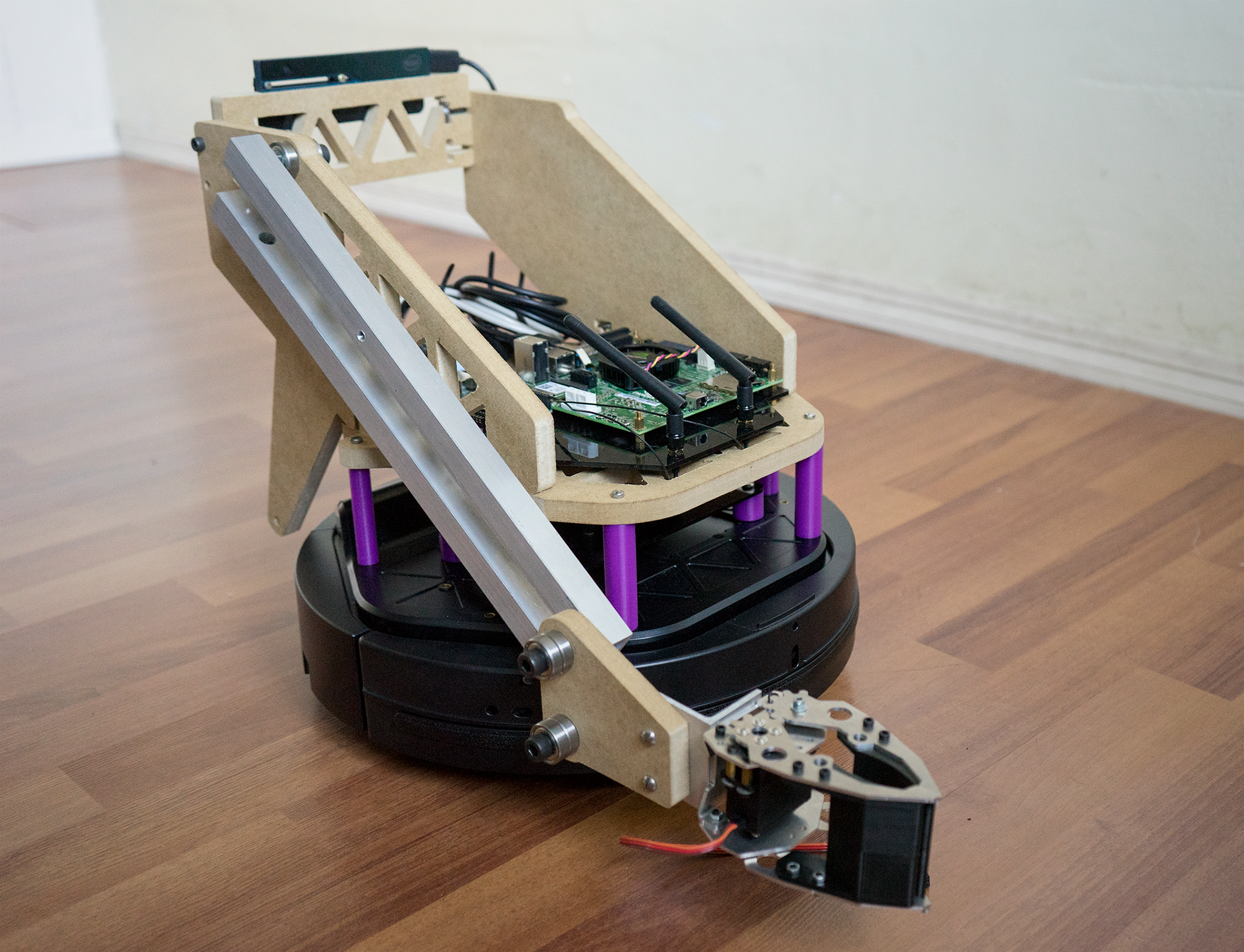
描述:BunnyBot的目标是生产一种实际上在日常生活中有用的自动机器人 - 取出电子元件箱,丢弃垃圾,取出饮料等。机器人是完全自主的,除了语音命令和手势之外不需要用户交互。
评论
0 / 100
查看更多
 每日资讯
每日资讯2019-08-21
1781

Copyright © 2024 苏州硬禾信息科技有限公司 All Rights Reserved 苏ICP备19040198号