Hackaday上的项目汇总-车轮,翅膀和螺旋桨比赛的相关项目
收藏
分享
脑图

描述:Scrapyard和Arduino是一个很好的组合!
描述:我们试图解决的整体问题是能够快速部署自动化运动系统。这样做的一个示例是在人道主义工作期间用于自然灾害环境。 机器人模块将从背包中解压缩,然后配置并链接在一起以执行任务。 任务可以根据场景而变化,例如将物品分拣到特定区域,或者甚至挖出区域以使站立的水从避难所位置流出。 通过让机器人帮助完成任务,工作与人类并行,为人类腾出时间做复杂的决策工作。
描述:几个星期前,我们和一些大学生一起开始了星球大战,我们虽然如果我们要把“现场”带到一个跟我们一起来的NPC,我们的团队会感到很惊喜。这是一个惊喜,所以不要告诉我们小组的任何人! 重要的是,我们将无法在夏季再次参加比赛,一些球员将返回家乡。
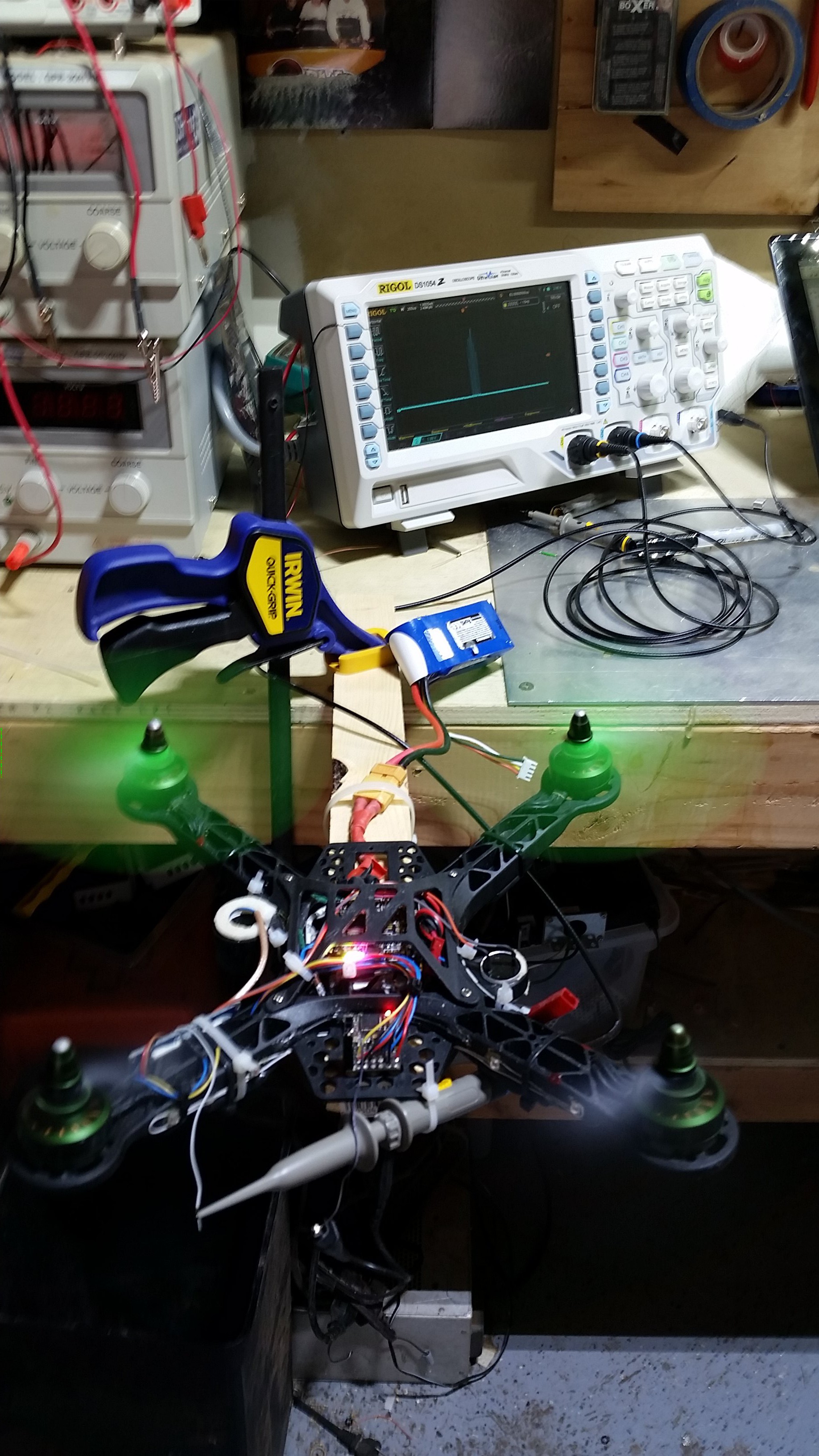
描述:我已经在这个系统上工作了一段时间来自动保持我的四轴飞行器的高度。 我发现在飞行时保持非常低的高度是使用四轮车更有趣的事情之一,但也是更具挑战性的事情之一。 因此,我希望我的四人能够在飞行时自动维持低空。 我也很喜欢挑战,喜欢使用控制循环。 另外,在这个项目之前,我的整个四元组完全依赖于其他人编写的代码 - 这是不可接受的! 必须拥有我自己一起攻击的东西才真正令人满意。

描述:该项目的目标是创建一个易于扩展的机器人平台,能够在所有条件下在户外操作。 轨道提供卓越的牵引力和地面压力,而FRC Mini-CIM电机提供700 in-lb的扭矩,足以使机器人在崎岖地形上移动并承载大量有效载荷。
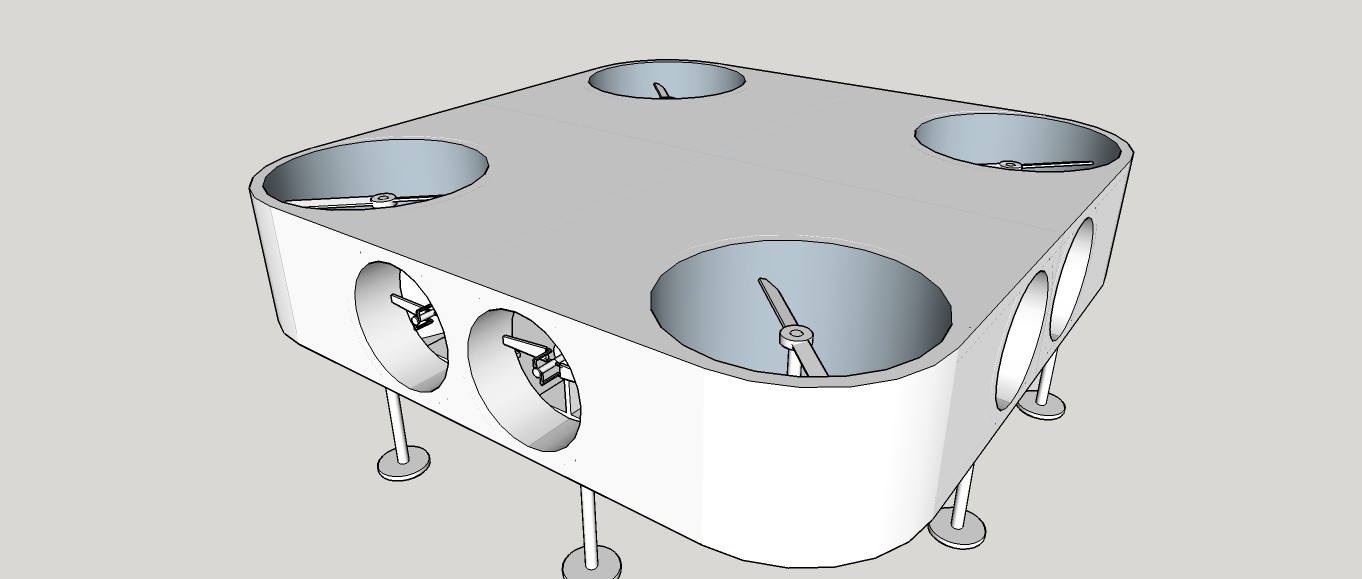
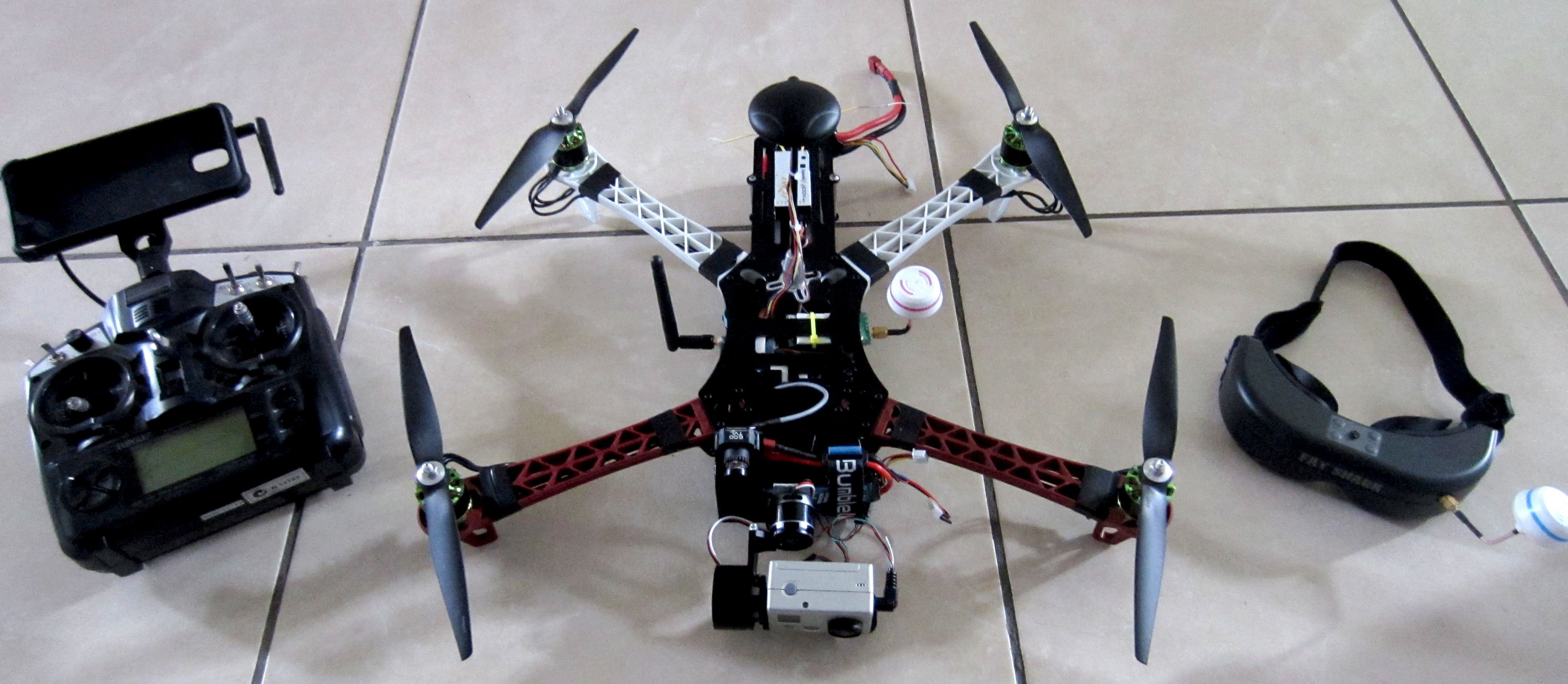
描述:在我的大学举行年度自动机器人竞赛。 在比赛中,自主机器人必须通过“门”并解决不同的任务以获得积分。 大多数“门”通过地面上的磁带线连接,机器人可以跟随。 我的计划是成为第一个用四旋翼飞机完成赛道的人。作为我的电气工程学士学位的最终项目,我设计并制造了一种自动四旋翼飞行器,能够在平面上低速飞行。四旋翼飞机的尺寸为30x35厘米,包括螺旋桨周围的防护装置,重量约为650克。 向下的摄像机用于跟踪地面上的特征以估计运动,而超声波距离传感器用于高度估计。
描述:当Hack一天宣布他们的Wings,Wheels和Propellers比赛时,我决定使用ESP8266 -01制作一个小型BEAM型机器人。
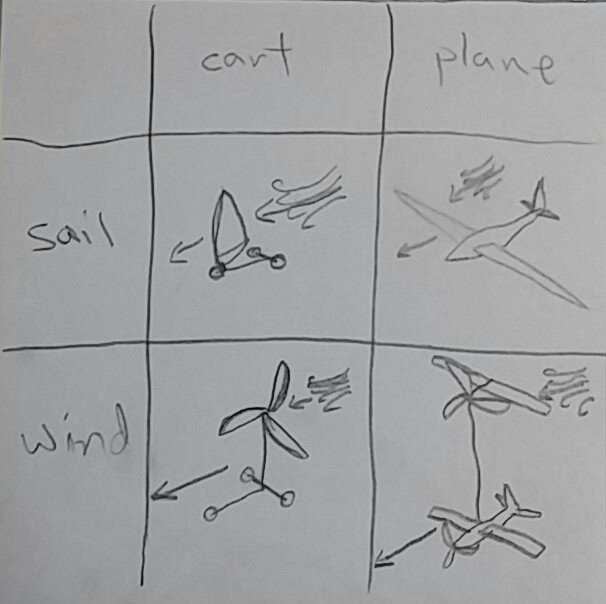
描述:您可能听说过风力推车声称比风本身更快地顺风行驶。 我曾经相信这是不可能的,直到有人解释说力量源不是风速本身,而是风与地面之间的速度差异。 该项目将使该原理适应航空导航,利用气流与周围相对缓慢的空气之间的速度差异。 风翼将采用通过系绳连接到飞行风力涡轮机的电动螺旋桨平面的形式。 只要两部分之间存在足够的风速差,这种布置就能够自由地向上风和顺风飞行。

描述:我最近从一家玩具店购买了一台相当便宜的Quadcopter(从现在起便称为“直升机”) - 推销员大大宣传了这一款。 约99€(约110美元),没有长期思考如何获得这个无人机......

描述:我们的黑客是一个通用的无人机平台,能够进行监视和空气质量监测,并使用自动路点导航系统飞行。

描述:一旦我买了我的新房子,我发明了My Bins,并意识到将它们带到草坪前面是多么麻烦。 前花园的布局主要是岩石,将两个箱子搬到前院本身就是一项使命。 所以我想出了这个想法,让家庭和我自己的日常生活变得更加轻松,毕竟忘记把垃圾桶拿出来然后一大早就把垃圾人赶去,以确保他们得到它们并不是很有趣。

描述:它开始是一个笑话,但飞得非常好,晚上非常漂亮!
描述:我的朋友的R2D2给了我灵感。 我看到他用机器人娱乐人们有多么有趣。 我不想用星球大战机器人窃取他的任何雷声,我总是偏向神秘博士的K-9。 我决定建造自己的锡狗半复制品。 我说这是半复制品,因为我个性化了一些外部部件,所以它并不完全相同。 我昵称他为Flux。 这是任何项目真正完成的完成项目。 我将升级和更改部件,以便使K9更易于使用。
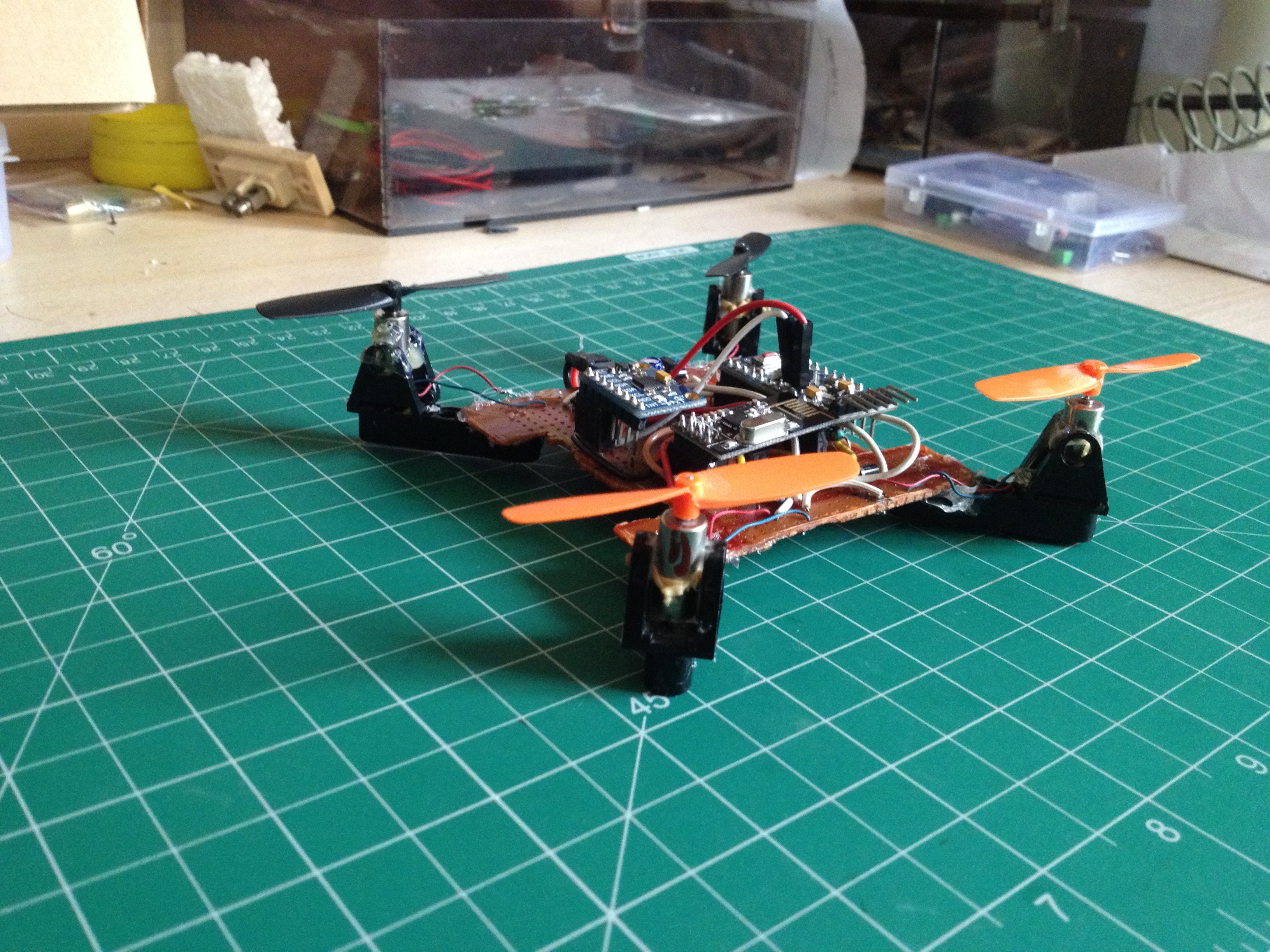
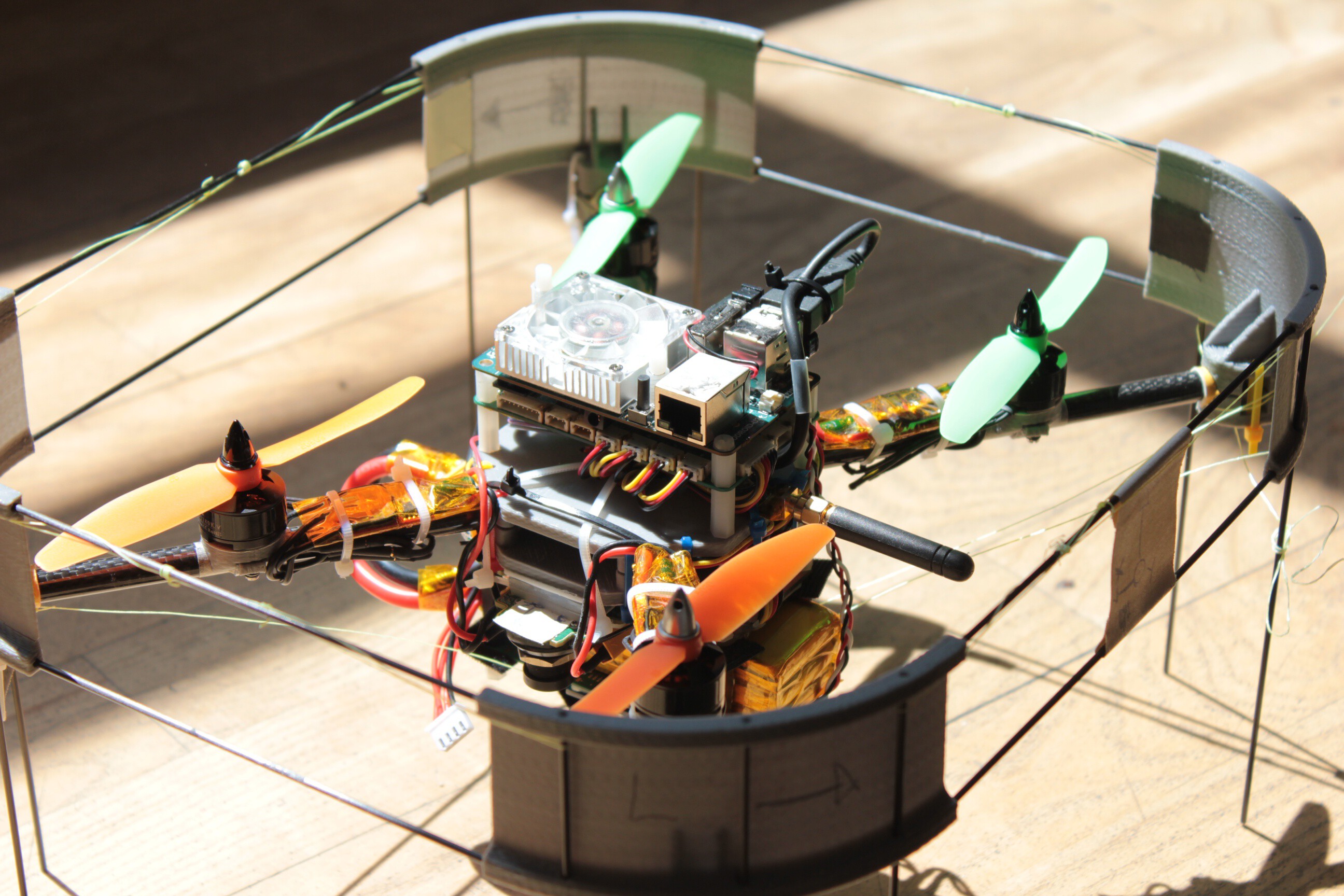
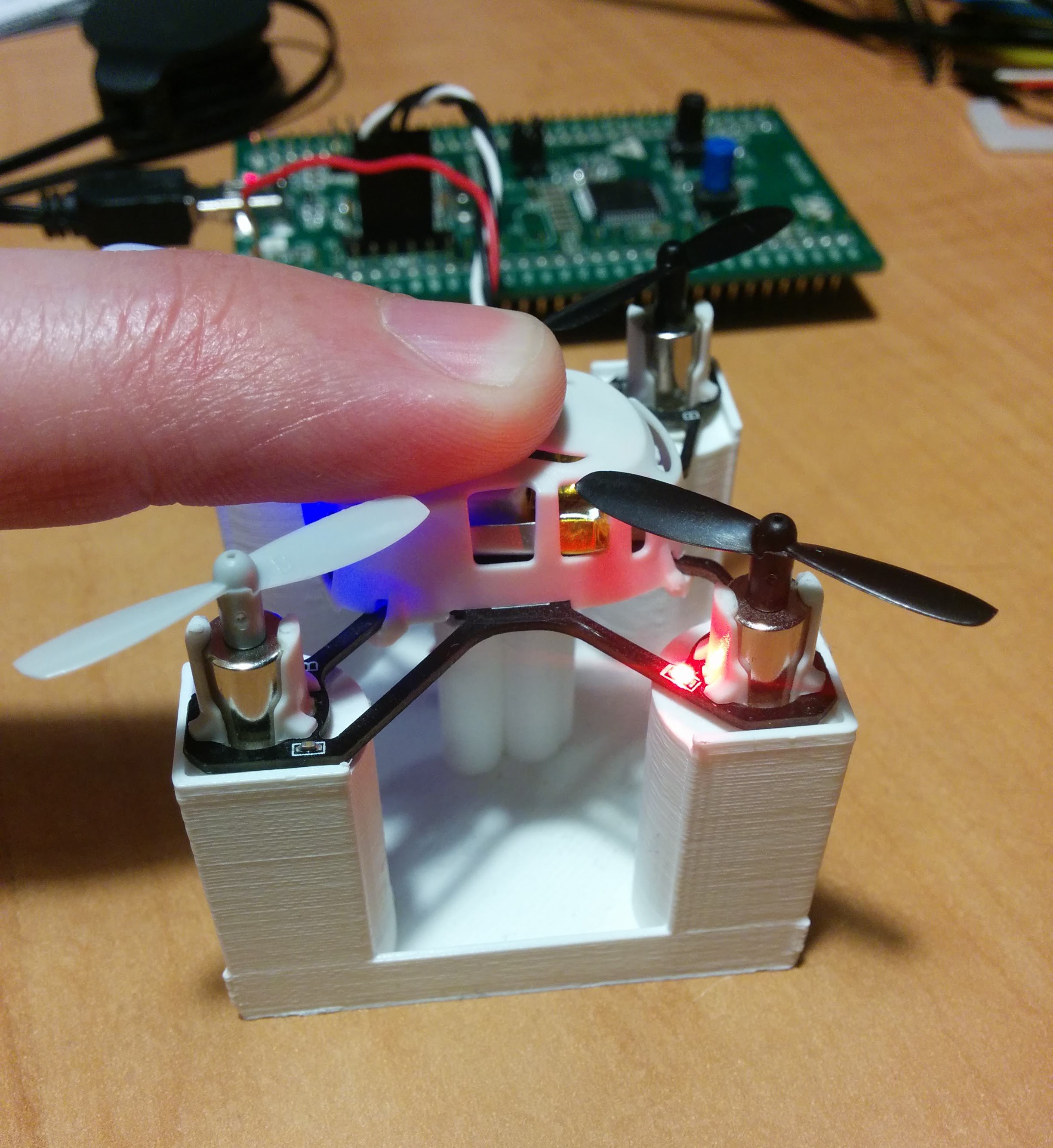
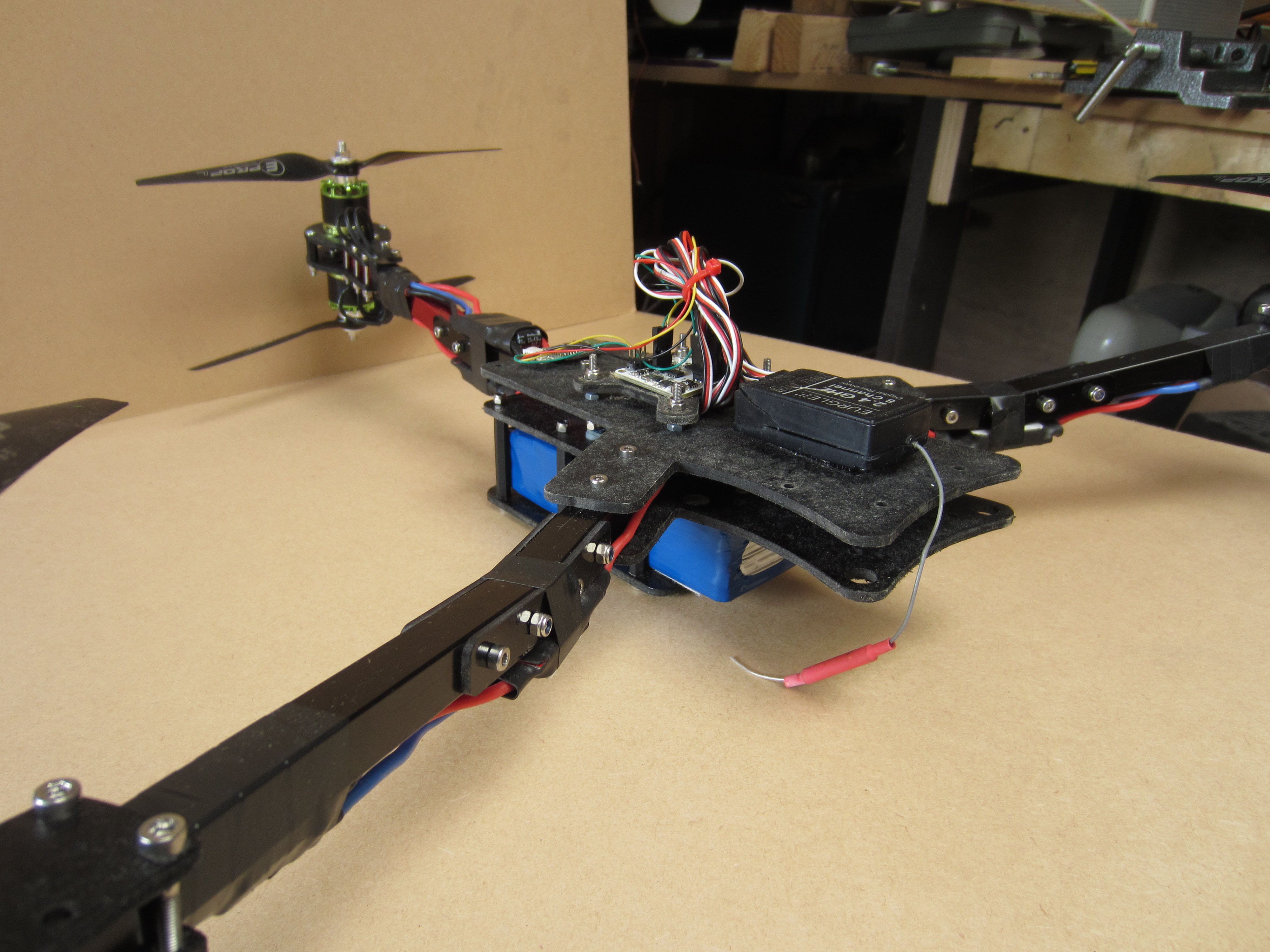
描述:我一直想制造一种可以飞行的车辆。 在建造了几个轮式机器人,然后穿过关于Execuc的四轴飞行器的Hackaday帖子后,我决定在今年夏天最终建造一个多旋翼飞行器。 因为我的预算很紧张而且我想从头开始构建所有东西,包括飞行控制器和无线通信,所以我选择了micro-quad。
描述:Hackaday Prize评委:请节省时间,此条目没有视频。防倾斜四轴飞行器与水平推进器。
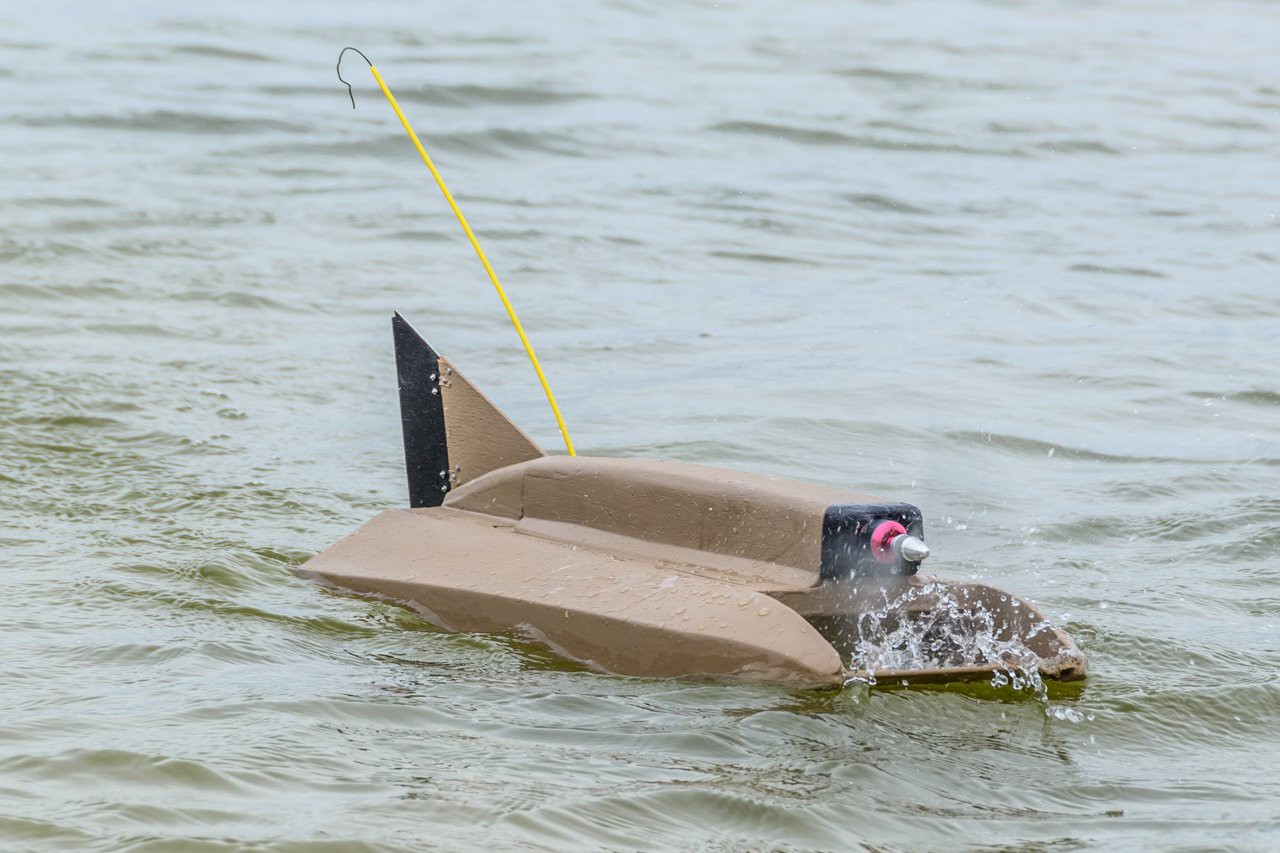
描述:我用一种我不懂的语言,遇到了一些可怕的低分辨率旧计划,建造了一个无线电控制船,使用燃气飞机和推进器进行推进。 我也没有汽油发动机,从来没有建造过一艘船,所以我自然无法将这个项目从头脑中解脱出来。我最近剥离了一些零件的激光打印机,并且遇到了一系列无刷直流电机,电路板上有控制电路,其中一些看起来似乎有可能用来驱动各种类型的遥控车。 是时候找出来了(Spoiler Alert:Nope)。

描述:我的灵感来自于我在RCGroups.com上由JasonF看到的一个版本,他做了一个非常棒的小型双向直播构建。 顾名思义,双直升机只有2个电机,它们安装在伺服系统上进行控制。 伺服系统提供偏航和俯仰控制,电机可以滚动。 这种布局可能非常难以调整,但提供了更优雅的集成到奴隶I.

描述:互联网连接航空可再生无人系统。全3D打印。
描述:BradWii是一款用于多路转换器的开源替代固件,运行在基于Nuvoton Mini54 ARM Cortex-M0处理器(如Hubsan H107和JXD JD385)的廉价“玩具”四轴转换器上。 尽管外形尺寸不同,但小型Hubsan Q4(也作为Estes Proto-X出售)的硬件几乎与H107相同。 由于尺寸的原因,Hubsan放弃了4引脚的封装尺寸,用于CPU的工厂编程,有利于不规则间隔的焊盘。
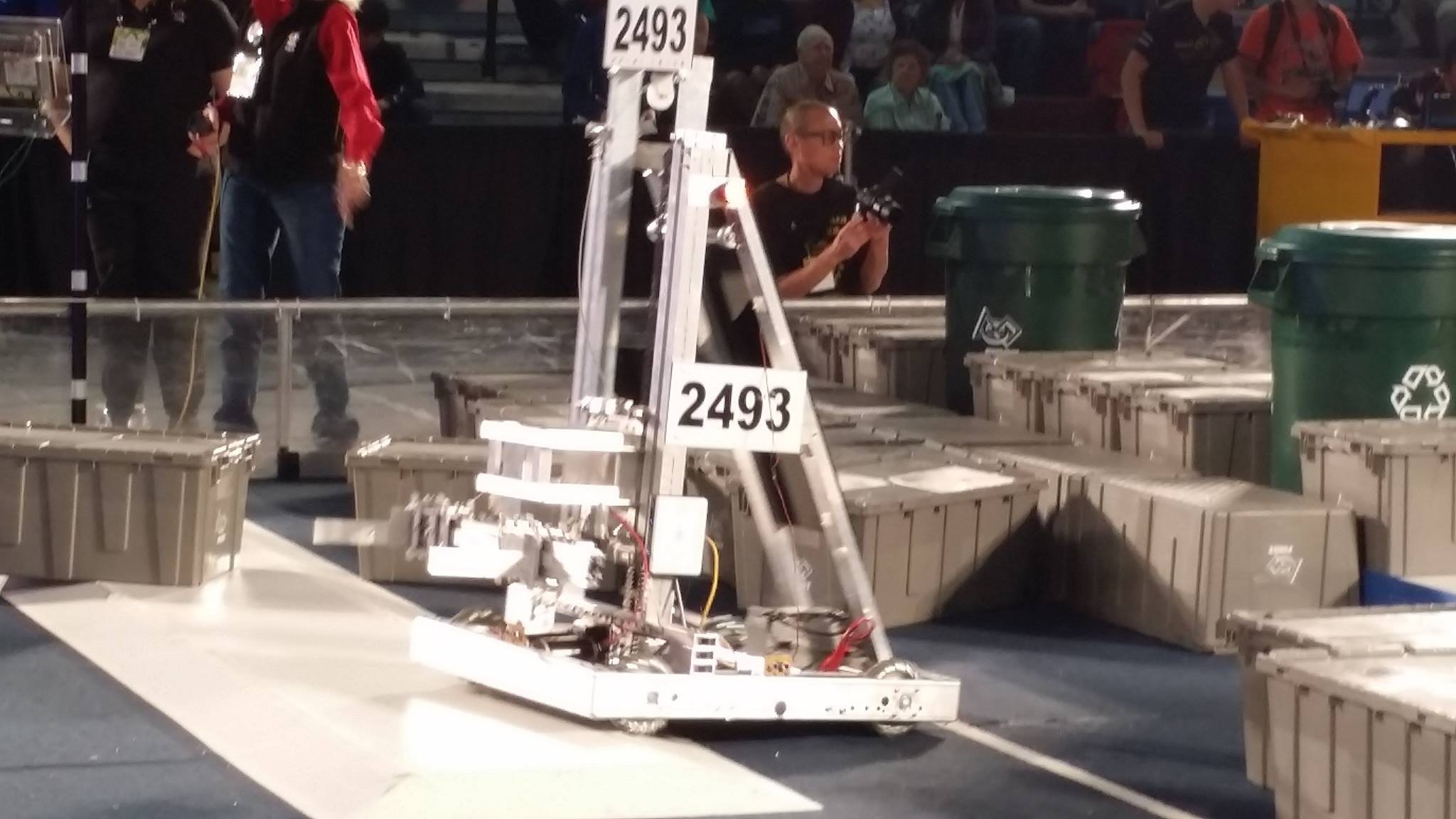
描述:该项目的目的是计算机器人在比赛开始时的15秒自治期间的位置。 第一个提出的解决方案仅使用GY80加速度计。 该方法仅需要x和y加速度的双积分的总和。 很快发现这种方法存在缺陷,因为传感器的任何俯仰或偏航都会导致重力严重影响结果。

描述:该项目是作为EPFL在机器人和自治系统方向的硕士学位项目完成的。 5个团队的3人不得不建造一个瓶子回收机器人,这个项目获胜。 从概念和设计到机械部件和源代码的每一点信息都可以在GitHub上发布。

描述:该项目的目标是从头开始设计,构建,编程和测试四轮直升机。 这个项目是为了我自己的学习和乐趣。一旦我手动四轮直升机飞行,我将开始研究自主控制,并计划将其用于我的大学最后一年项目。
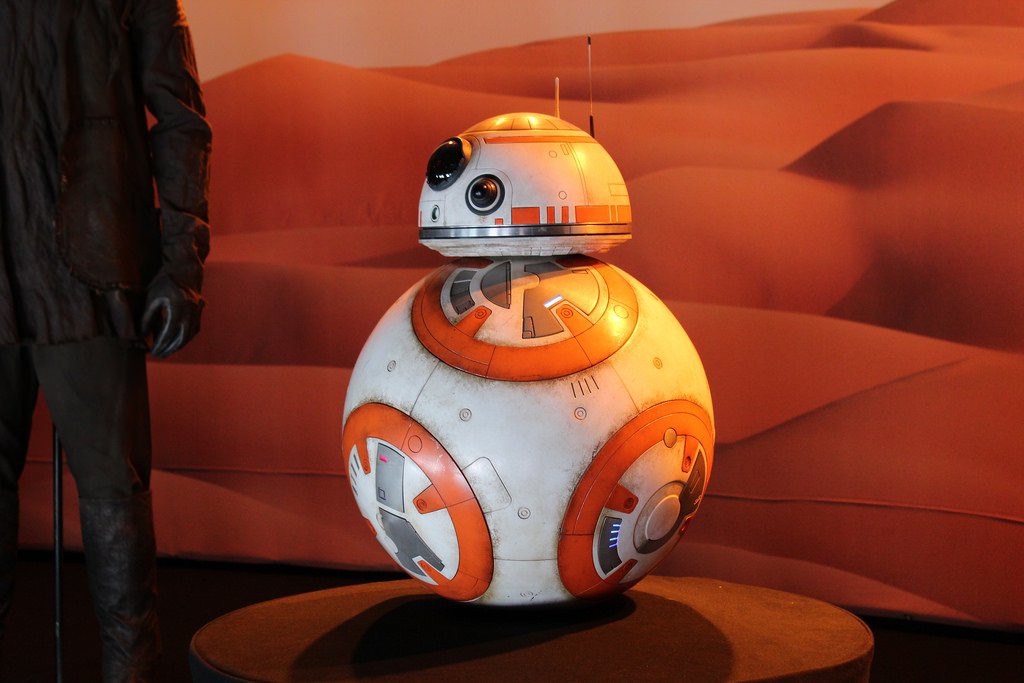
描述:这是我在儿子的帮助下实现的一个小项目。 我们想要一个机器人和BB-8是我儿子的选择。由于关于“真正的”星球大战机器人的细节仍然不多,我们正在设计和构建我们自己的版本。使用完整的全向驱动系统和头部的磁性锚固装置,它将非常接近原件。

描述:交通运输是世界上最贫困地区的主要问题。 我居住在南苏丹的地方往往物质基础设施有限,大多数车辆无法应对可怕的道路。 特种越野车也不在普通人的手段之内。 我正在尝试制造一种可以应对这些恶劣环境的太阳能电动车,并创造一种适合每个人的运输解决方案。

描述:该项目的目的是生产一种传感器组件,可安装在小型固定翼无人机上,并拍摄目标区域的多光谱图像。 我主要关注的是农业应用,我想利用它来自动检测遭受干旱或疾病的土地。 我也想尝试将成本保持在最低限度。 最初我希望使用Raspberry Pi和相机模块,为了便于原型设计,我实际上最终使用了Point Grey的豪华小单色相机,但我仍然希望在某些时候能够回到更便宜的东西。
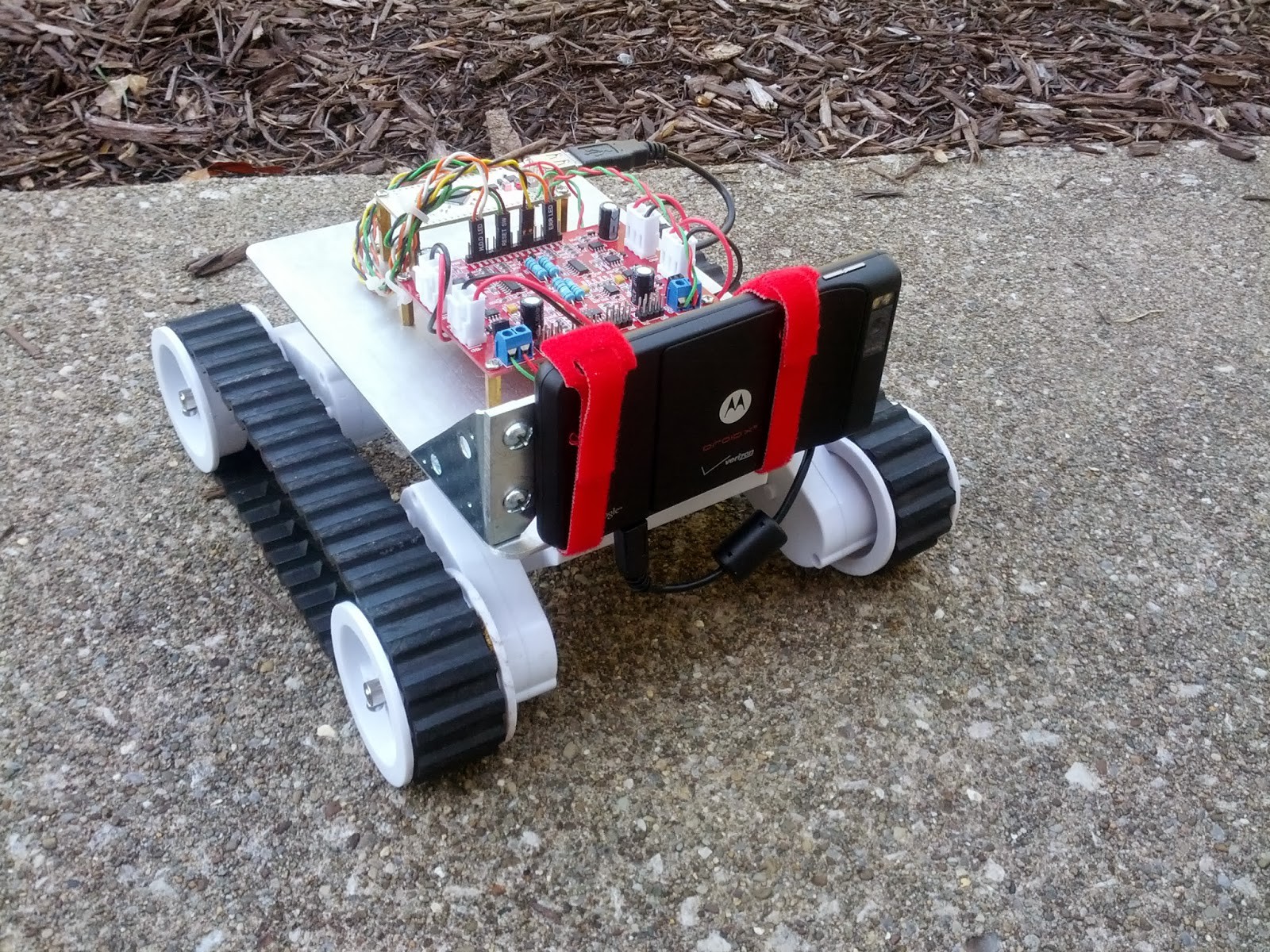
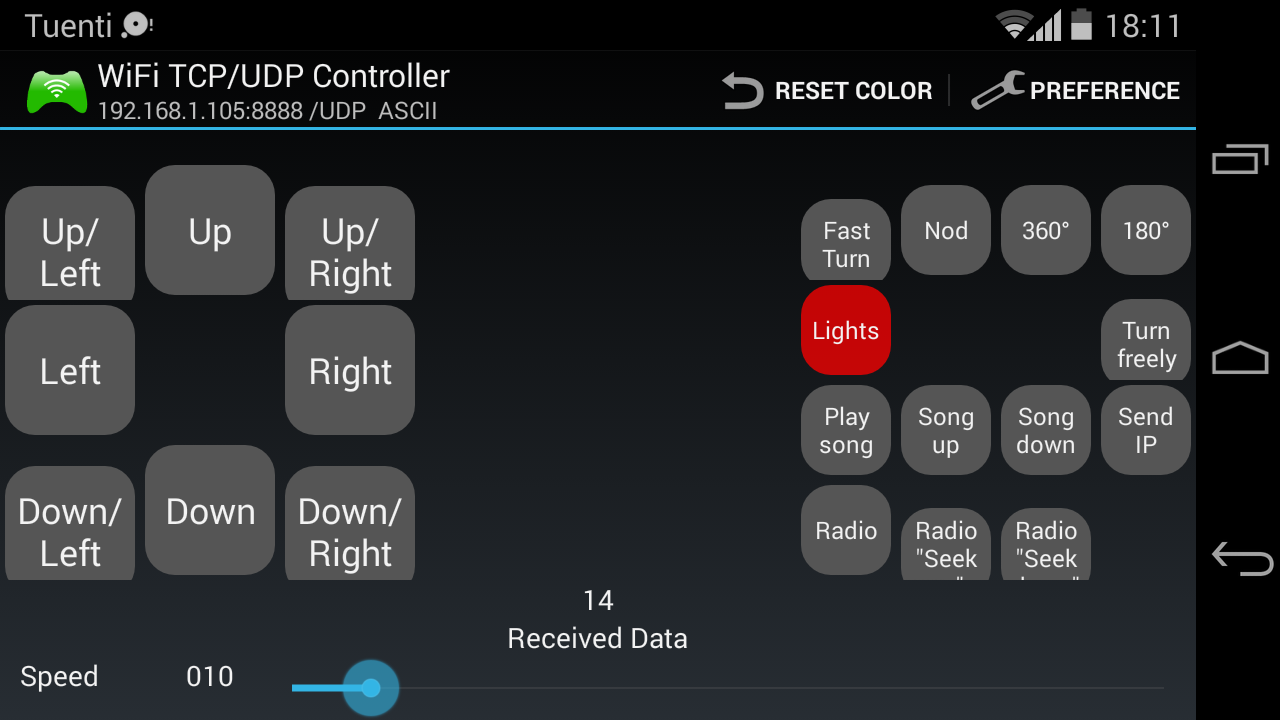
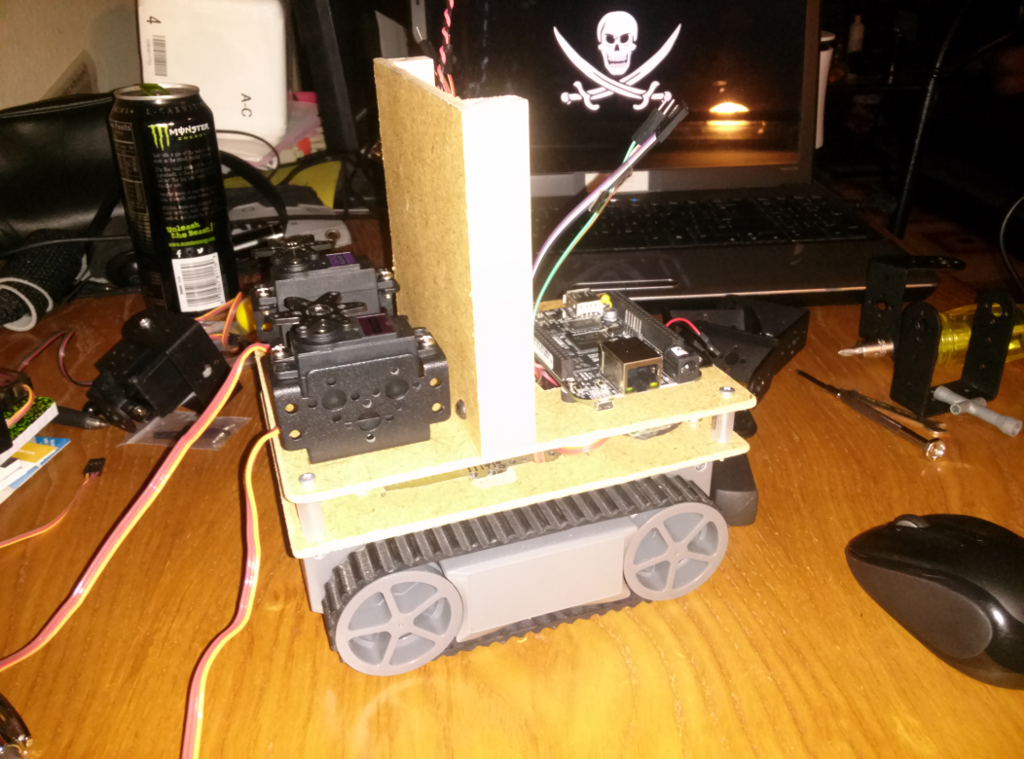
描述:可通过WiFi网络或互联网远程操作的小型漫游车。 流动站对于学习Android编程和试验网络控制车辆非常有用。 我打算用它来学习导航算法,然后再用于容忍度较低的车辆。通过定制的Android应用程序通过蜂窝网络和朋友的家庭互联网连接远程成功驱动流动站。
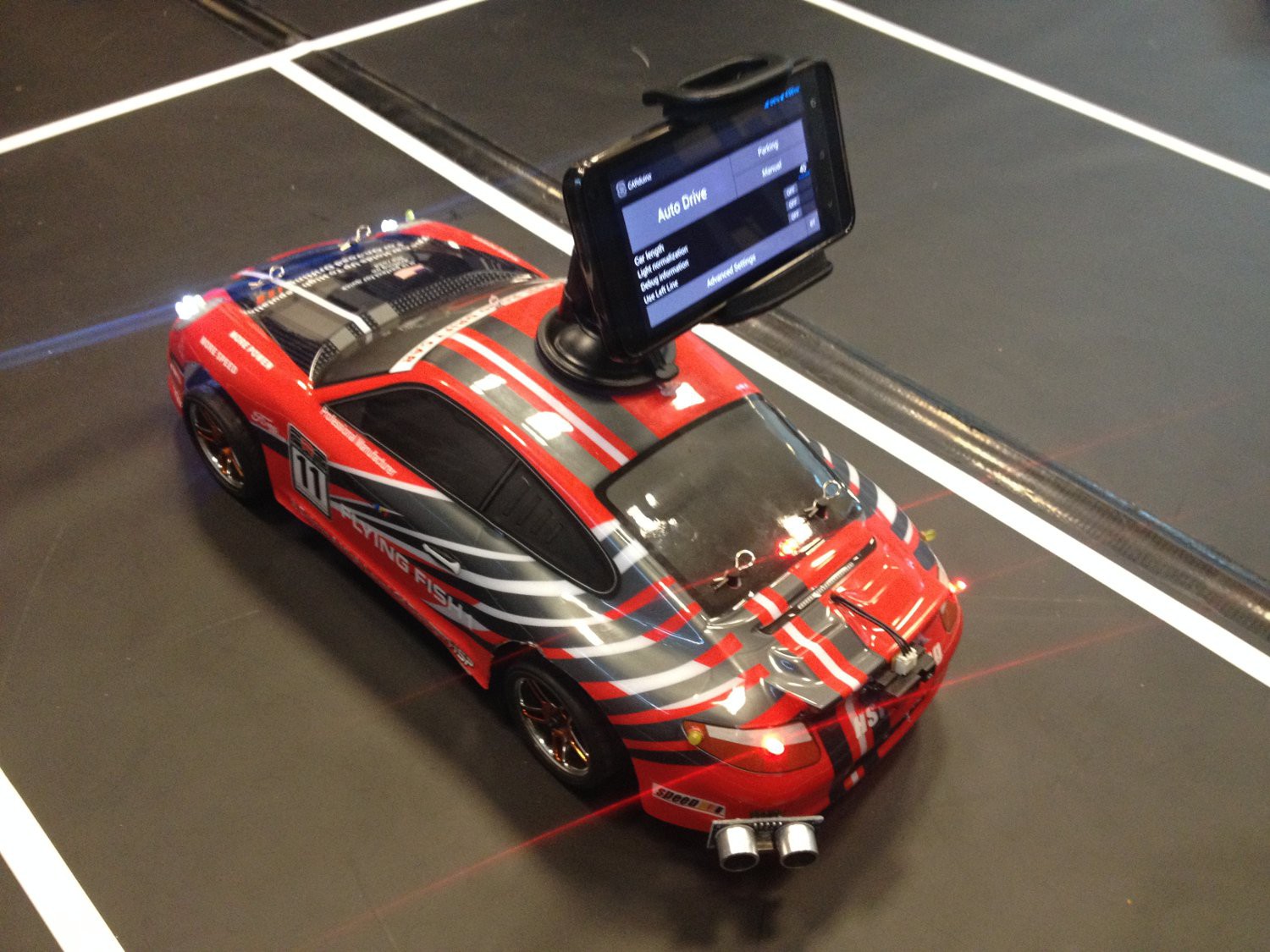
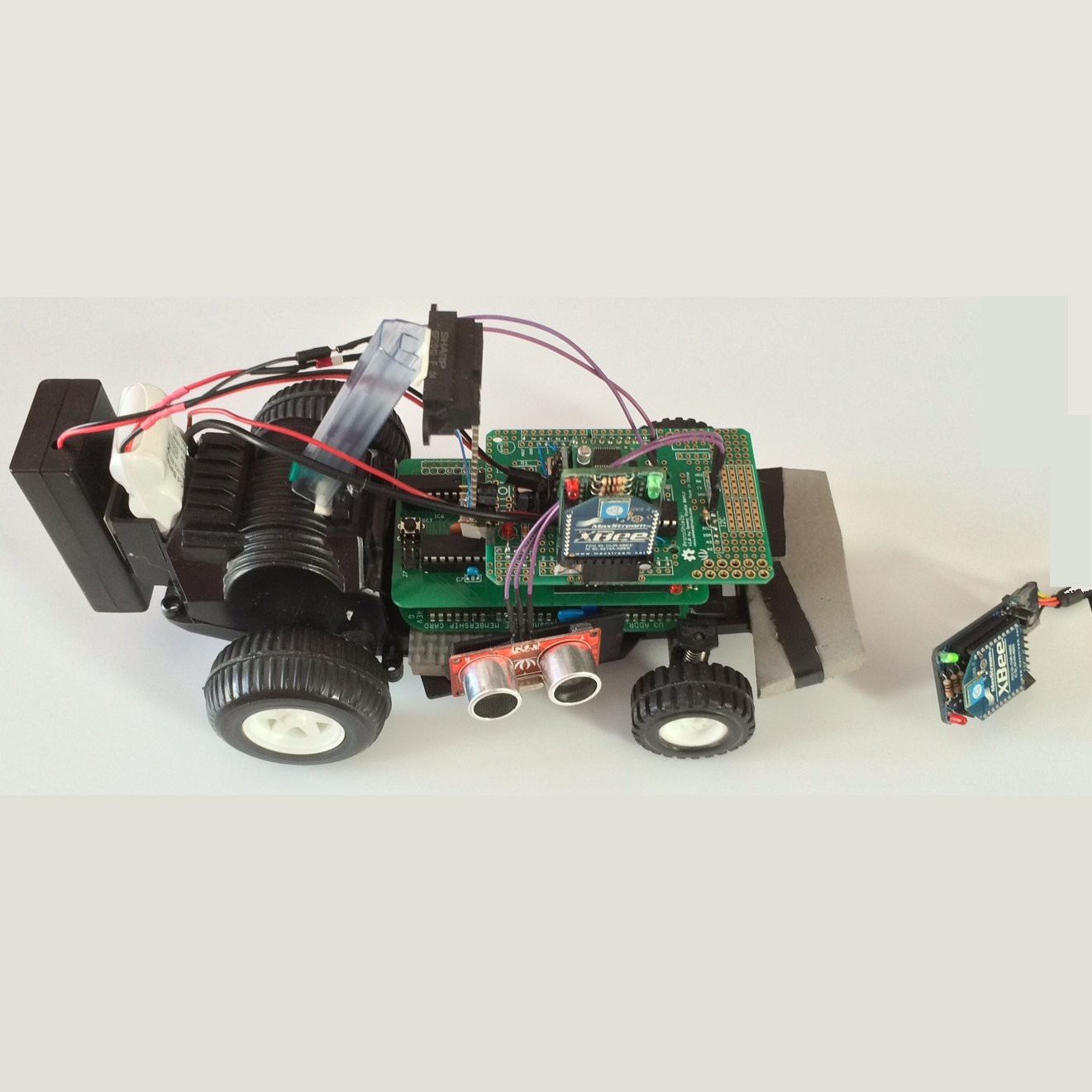
描述:一种自动驾驶车辆,利用机器视觉算法和技术以及来自车载传感器的数据,以便沿着街道行驶,执行停车操纵并超越阻挡其路径的障碍物。 该项目的创新方面是使用Android手机作为实现图像处理和决策的单元。 它负责向Arduino无线传输指令,Arduino控制车辆的物理方面。 其次,使用Arduino库以面向对象的方式处理各种硬件组件,这使得开发人员能够轻松地完成他们的任务。使用普通移动电话而不是专用设备(即Linux单板计算机),提供了更高的可部署性,用户友好性和可扩展性。 可以部署在路上的基于Android的自动驾驶汽车在文献的其他地方找不到。
描述:这个可爱的小机器人基于零件,任何人都可以使用开发平台和电子设备。 这就是为什么这个项目针对那些想要了解更多硬件的人,以及那些只想要便宜的代码来运行代码的程序员。 想象一下,只有两个完整的机器人可以以一个Arduino平台的价格进行试验!

描述:我喜欢教孩子们关于STEM活动。 我喜欢看到他们的兴奋! 我喜欢说服他们,如果他们*希望*成为工程师或科学家,他们*可以*成为工程师或科学家。 最近我一直在寻找一种教孩子们关于无人驾驶飞机的方法。 问题在于它们要么是儿童无法真正构建和编程的玩具,要么是更大并且需要飞到外面。 这不利于课堂学习,大多数无人驾驶飞机的控制算法在2周内不适合。

描述:Atropos基于OpenWRT La Fonera 2201路由器(它还有一个TP-Link路由器来捕获命令)。 它由一个完全自制的惯性测量单元自动稳定,使用Wii控制台传感器。它们使用LED线直接连接到路由器。 LED线用作软件模拟的I2C端口。飞行控制是100%来自刮擦,它在WiFi路由器上运行。 PIC16F通过rs232从路由器获取命令生成电机PWM。

描述:德州游侠是一种由木制件和塑料玩具轮制成的差动牵引车。它有一个安装在顶部的2自由度炮塔,它有一个ip摄像头,一个激光指示器和两个PVC自动炮,由两个便宜的枪式玩具制成,后面安装两个MOSFET,并由两个MOSFET驱动。 Turrent是1自由度自补偿倾斜度,由Wii双节棍测量。车辆使用Linksys WRT54G,OpenWRT装载。 路由器通过以太网连接到IP摄像机,并通过系列连接到带有两个16F876 PIC的自制电路板。 电路板控制用于差动牵引的电机,Wii双节吸线读数和转塔自补偿在PIC上计算并通过RS232通知路由器。
描述:在制作了用于拍摄的重型升降机后,在我的家门口拥有从山地自行车到摩托车X的所有东西,我决定建造一个具有以下属性的预算四轮车。
描述:在“快乐事故”中,我遇到了一款强劲,多功能且非常便宜的Multirotors建筑材料!

描述:我在这里工作的是一个平移/倾斜底座上的安全摄像头,具有70倍光学和2000倍数字变焦(不,这不是一个错字),最终将通过基于OpenCV的计算机视觉和其他形式的控制进行控制。 一些计划(截至目前)是用它来发现飞机,甚至是小型无人驾驶车辆,跟踪汽车,或者甚至可以更近距离地观察头顶上的卫星,而不是人眼可以给我们看的卫星。 这只是项目的开始,因为这是一个概念证明,看看我是否能控制变焦。 相机不是很便宜(无论如何我的定义),所以我不想打开它并冒险破坏任何东西,所以任何完成的mod将是外部的,可移动的。

描述:F-1型电动赛车。
描述:无法说服配偶单位可以在PR2上丢掉数十万? 告诉她UBR-1是价格的十分之一仍然不能说服她吗? 进入Ruprecht(重新设计的Rudforce研究机器人),这是一款小型,适合公寓使用的自主式研究型机器人,其成本不比您的汽车(或房屋)高。

描述:这是我和我的朋友一起制作的第一架飞机模型。

描述:这辆自行车起初是一台燃气动力机器,现在纯粹是以电动方式运行。 库存发动机被Mars Etek 48伏永磁电机取代。 四个55ah SLA为牵引系统以及传统的12伏系统和Arduino提供动力。
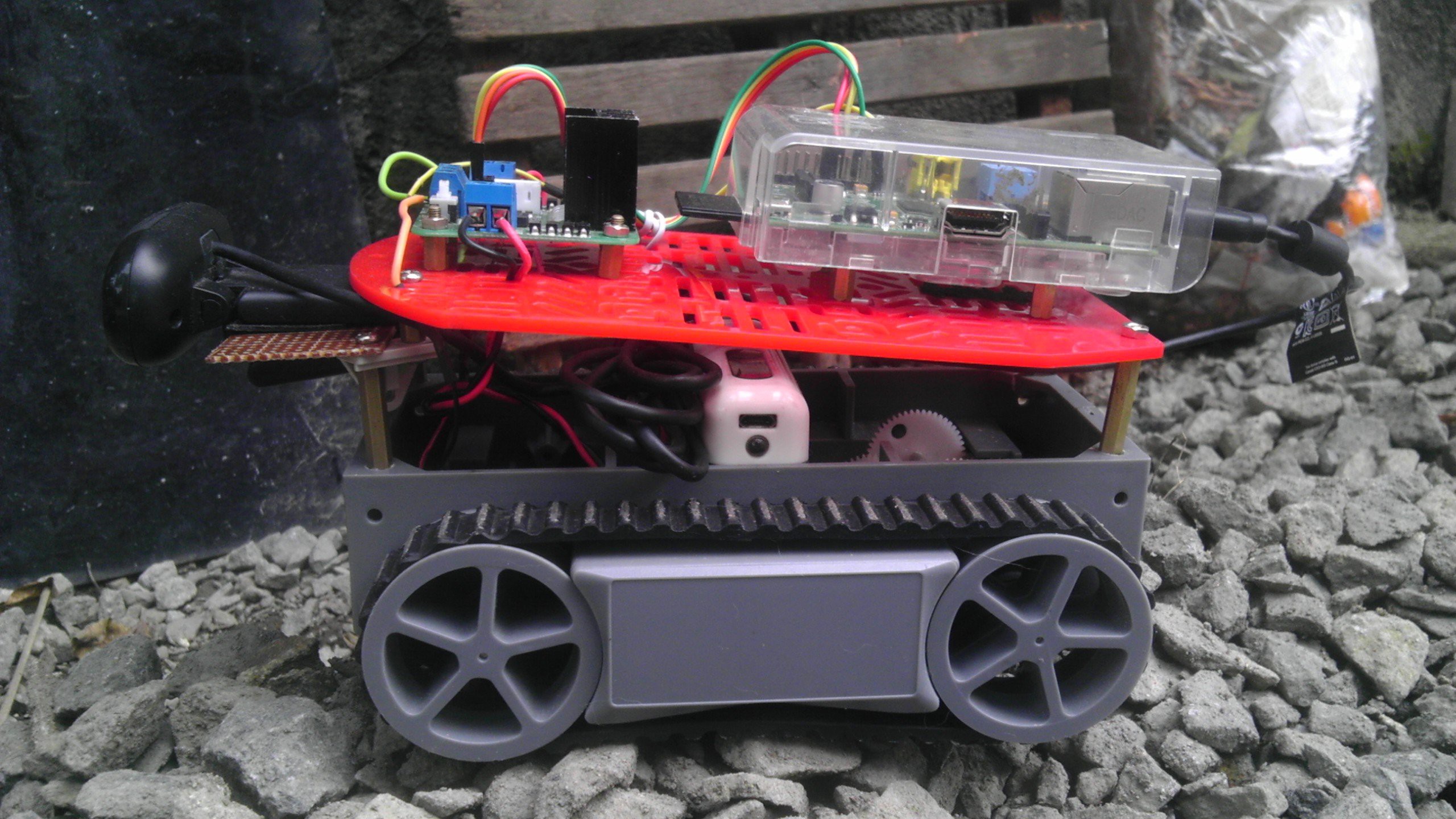
描述:这个项目的构建基于如何制作一个每个人都可以构建的简单便宜的在线监控摄像机器人的想法。 不仅机器人还必须易于使用和维护。 在MagPi杂志上使用树莓派,几个便宜的组件,机器人底盘/ RC车和webiopi教程,这个项目已经成功建立。 要启动此机器人可在线访问,请使用www.ngrok.com上的ngrok服务。 没有任何忙乱和困难的端口转发配置,现在可以通过使用firefox或chrome浏览器来控制世界上的任何人。

描述:UP1是UpDroid的模块化机器人平台,可将与机器人相关的所有复杂性降低到软件编程中。 它由模块化硬件和软件IDE组成,使与机器人的交互尽可能简单顺畅。 机器人在后台运行ROS,并在易于使用的基于浏览器的环境中呈现。

描述:电动汽车被广泛视为内燃的环保替代品。 然而,评论家们喜欢指出他们是多么无聊,资源密集和昂贵。

描述:石墨烯动力汽车将以多种方式使世界受益。 它没有排放因此不会造成污染,只需几分钟即可充电。 可以创建感应充电。 如果这样做了,就可以将感应充电板放置在车道停放的车道和停车位上,并在车辆停放在车顶上,并以无线方式为车辆充电。 由于它们是超级电容器而不是电池,它们可以持续更长时间,并且您可以在一次充电时驾驶(我们瞄准)至少两千英里。 对于紧急情况下的车辆,使用超级电容器会更好。 让我们说你的车出于某种原因会失去它的费用。 您可以在发动机上安装紧急曲柄并使用动能充电。 不再推车了! 我们的计划是制造一个包含多个石墨烯超级电容器的多细胞能量包,以取代目前用于电动汽车的电池。

描述:它将是SR-71 Blackbird的语音控制模型,配有两个脉冲喷气发动机和一个相机。

描述:该机器人将使人们更容易知道何时执行特定的健康维护任务,并通过提供所需的项目使其更容易执行这些任务。
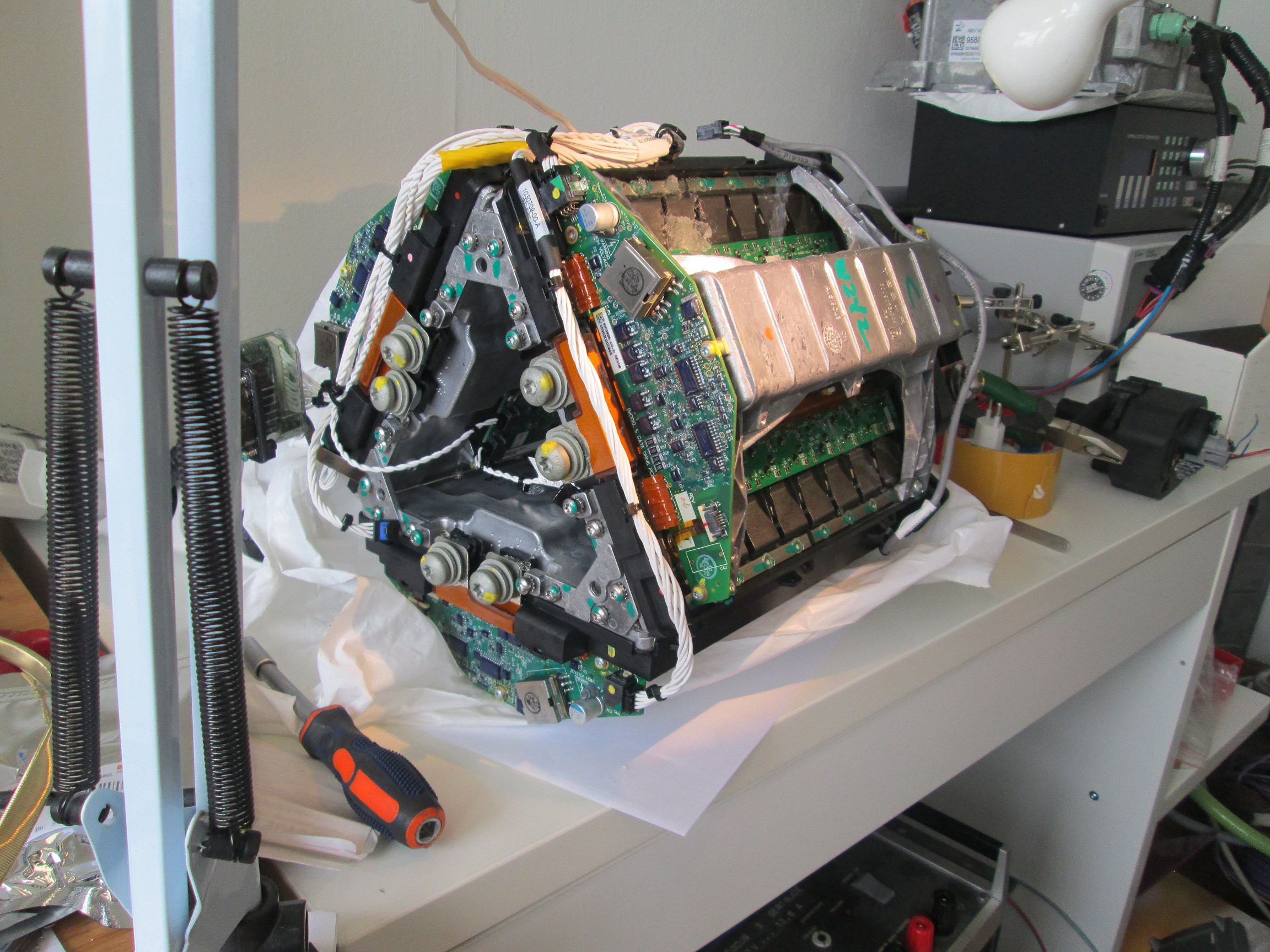
描述:由于特斯拉Model S是市场上最先进的电动汽车,因此对它的皇冠上的宝石 - 310kW,590Nm单速动力传动系统进行逆向工程是一个巨大的挑战。 为了解决这个问题,我正在使用我的UMC驱动器 - 我最初为Chevy Volt和Toyota Prius逆变器开发的电机控制器。
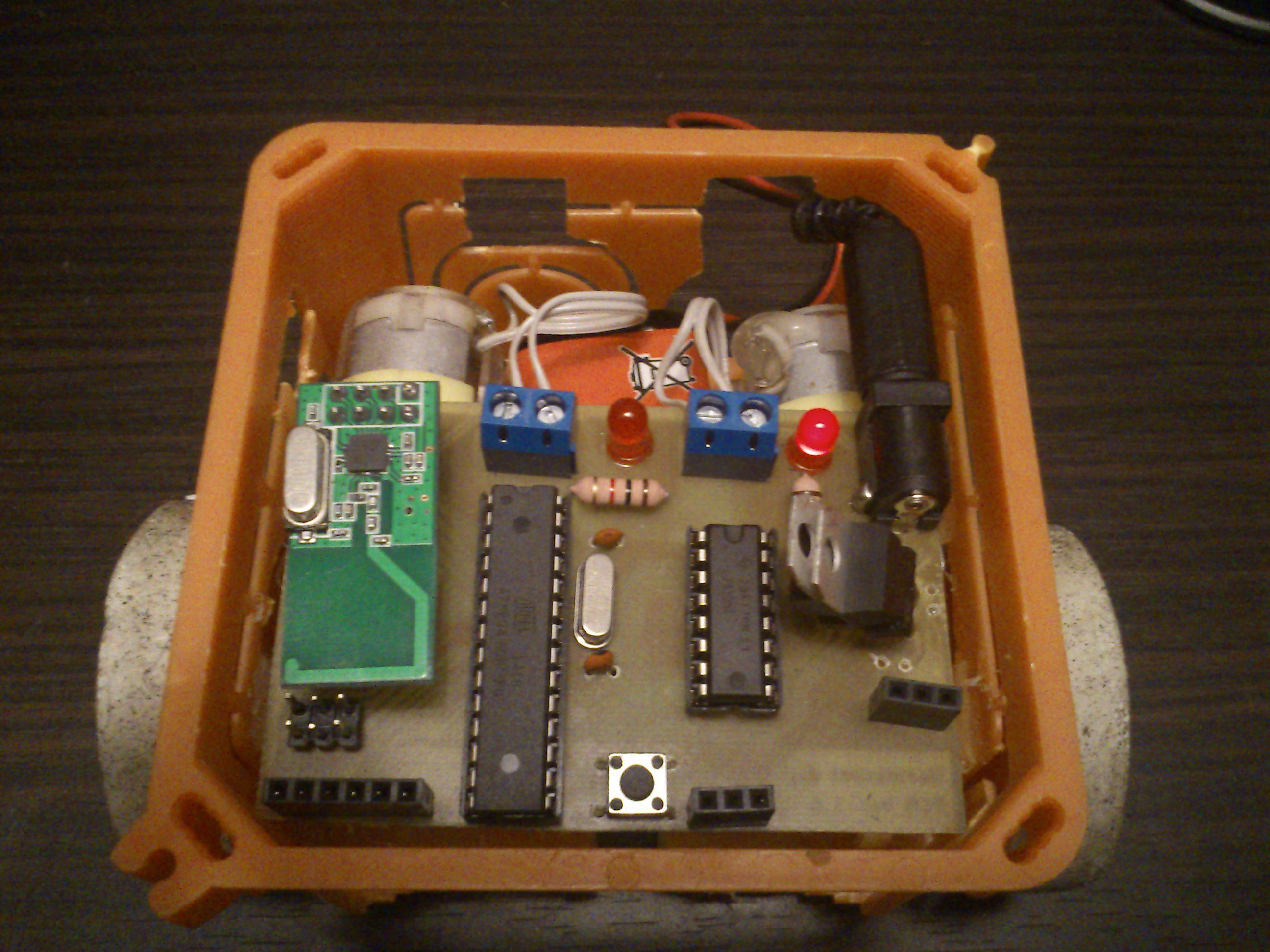
描述:1802处理器可以追溯到最早的爱好计算时代。 Olduino是一个适配器板,让1802使用现代外围设备和Arduino组件。 Carbot是一个Olduino项目,它可以使电池供电的汽车在一个小的竞技场周围比赛,与墙壁保持固定的距离。 它包括红外线和超声波传感器,模数转换器,电机驱动器,电池升压调节器和XBee无线网桥,所有这些都内置在arduino风格的屏蔽上。
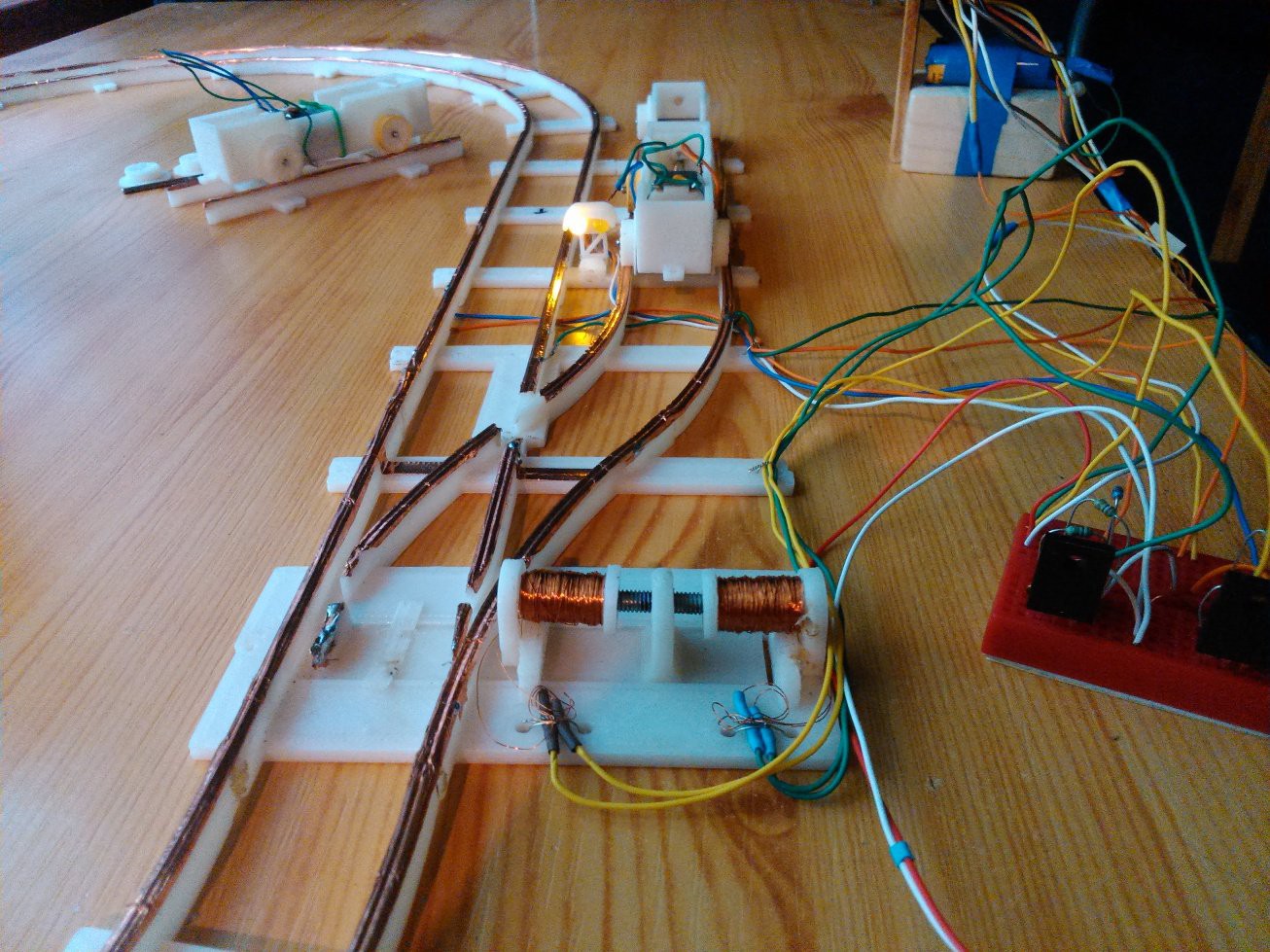
描述:我一直想要一辆模型火车,但看到天文价格,我立即摆脱了这个想法,直到现在。 该项目的目标是创建一个便宜的3D打印,全自动模型铁路系统,可以在家里建造。 模型铁路使用最便宜和最少的部件建造。 该项目的大脑是Raspberry Pi,因此整个系统可以通过互联网从任何具有网络访问权限的设备进行控制。 它非常适合家庭建模爱好者,学习和教学电子,编程,CAD建模,3D打印等。整个项目是开源的:原理图,3D模型,源代码都可以在GitHub上获得。 这个项目尽可能简单:没有RF,没有GPS,没有FPGA,没有CAN总线; 只有基本的电子设备和AVR,只需要一点C编程。 它会改变这个世界吗? 可能不是,但我们会看到......

描述:城市交通很难:公共交通不可靠。 汽车很贵。 乘车共享不适用于通勤。 自行车小而快,但没有人想在上班时出汗。电动自行车允许快速,低排放和低成本的点对点旅行,但由于高拥有成本,有限的范围和复杂的使用(例如必须将自行车停放在可以充电的地方),到目前为止基本上没有采用。我们的解决方案:模块化,简单和高效的自行车设计,将所有电子设备,蓝牙,电池和锁定集成到一个可拆卸模块中。 这使得自行车可以被个人使用 - 或者扩展到公司甚至城市范围内的电动自行车共享计划。

描述:完全失去肌肉使用的人不能操作他们自己的轮椅。Eyedrivomatic系统利用现有的眼动追踪技术,允许用户再次驾驶他们的椅子 - 仅使用他们的眼睛。 这是一种低成本,开源的方式,可以让那些认为永远失去它的人回归。
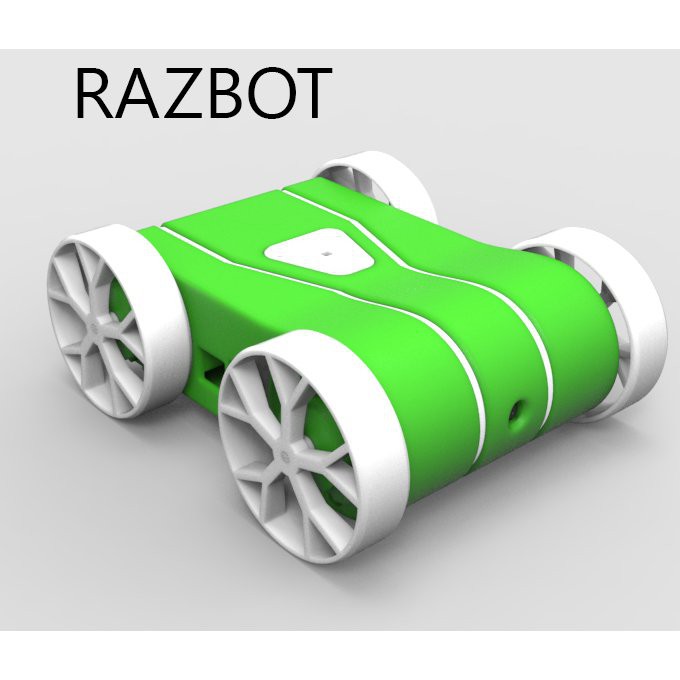
描述:这是一个使用Raspberry Pi和机器人操作系统的3D可打印机器人。 所有设计文件和文档都可以在Github上找到。 它使用四个减速电机以滑移转向配置驱动机器人。 它使用Raspberry Pi相机,用户可以通过网络浏览器查看。 可以使用游戏手柄操纵杆或通过任何其他软件发布驱动器主题来控制机器人。 Razbot可以通过组装包含2x 2通道电机驱动器的定制PCB,运行ROSserial的ATMega 328,电压调节器和锂电池保护来构建,或者用户可以使用现成的组件。 机器人由3S 2200 LiPo包提供动力。 顶部的新像素LED可让您了解机器人的想法。 已经构建并测试了多个单元。
描述:磁悬浮飞行汽车。
描述:手提包是一种四足的蜘蛛状机器人,设计为便携式步行机器人实验的简单基础。 它很容易制作,但很容易修改和扩展。
评论
0 / 100
查看更多
 Lucia li
Lucia li2019-08-20
1272

Copyright © 2024 苏州硬禾信息科技有限公司 All Rights Reserved 苏ICP备19040198号