Hackaday上的项目汇总-TI MCU,ARM,BeagleBone的相关项目
收藏
分享
脑图

描述:BeagleLogic使用可编程实时单元以及BeagleBone Black上的匹配固件和Linux内核模块,在BeagleBone Black上实现了逻辑分析仪。 支持捕获BeagleBone Black最多300 MB的内存(512 MB内存)。
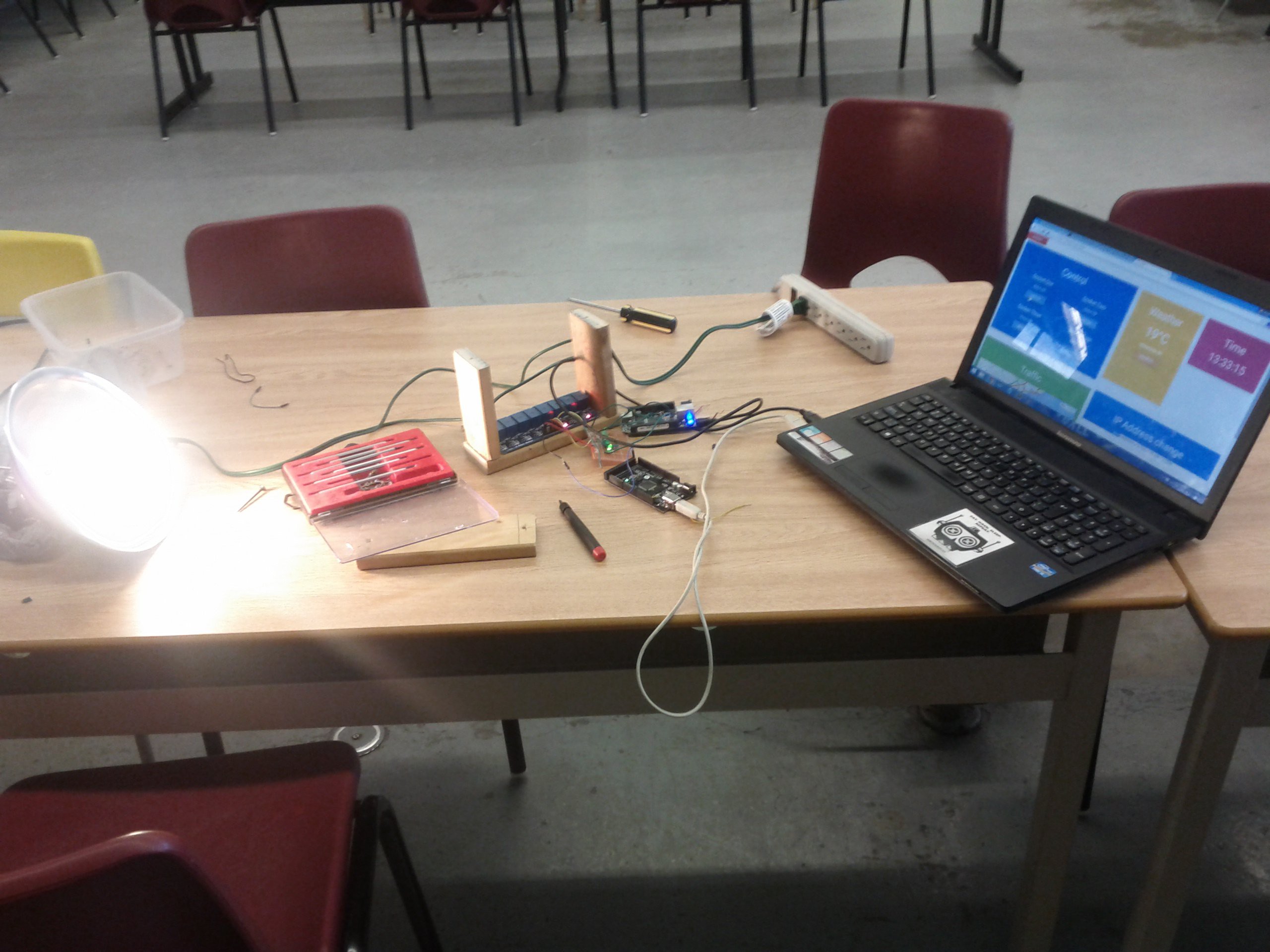
描述:当我们学习优化时,该项目的灵感来自我的微积分课程。 该项目是针对我们的计算机工程课程,在那里我们获得了大量材料和板材,以便创造任何新的或有趣的东西。 我决定制作一个可以通过任何设备连接的便携式家庭自动化盒。 此外,我计划测量电流并优化使用以降低成本。 该项目目前正在进行中,因为我在此过程中添加了改进和新功能。

描述:每个人每月都会收到数百张纸质收据。 这些论文不仅难以管理。 它们也是对环境有害的物质。 它们由化学涂层纸制成,不可回收利用。减少,重复使用和回收。 Reduce首先出现并非巧合。 减少意味着首先使用更少的资源。 这是R中最有效和最难的。 Aleph是为了减少热敏纸。

描述:这是我和我正在为全球太空气球挑战做准备的高空气球任务。 我们是来自文茨皮尔斯大学的团队,我们认为这将是一个很好的机会,因为我们参与了一些与太空相关的项目。 我们的目标是发射近太空探测器,拍摄近距离风景的精美视频,并拍摄近红外光。 红外图像将用于确定NDVI(归一化差异植被指数)。 这基本上表明了植物的生命状况。 我们将使用SJ4000 cmera捕捉近空间的视频和改进的佳能相机拍摄近红外线照片。 此外,我们还将配备压力传感器,加速度计,陀螺仪,磁力计和多个温度传感器。
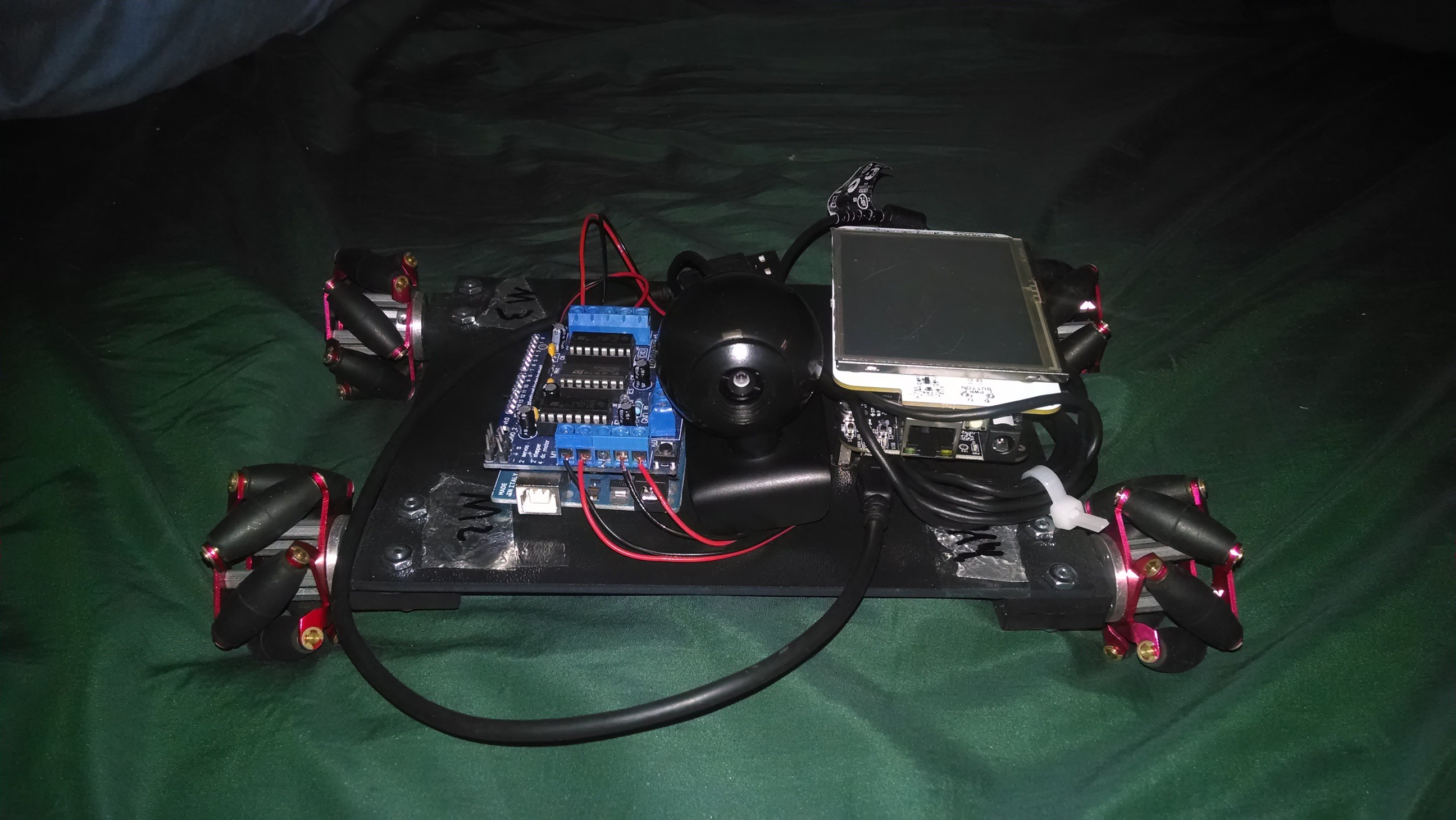
描述:SortME使用beaglebone black和OpenCV进行图像处理。 当获取移动机器人所需的坐标时,相应的字符被发送到指示方向的arduino。 当接收到角色时,arduino相应地使用电机护罩移动电机。
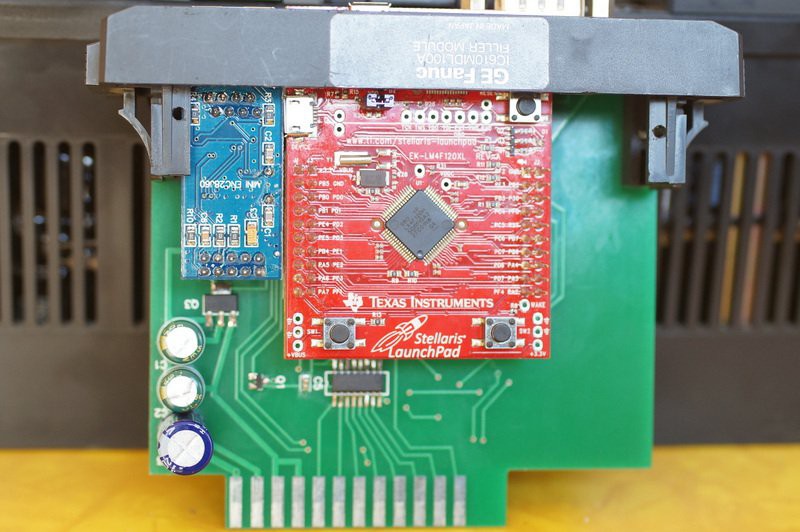
描述:我有很多GE PLC部件,但没有像样的CPU来控制它们。 我决定构建一个新的CPU模块。 我选择了TI Stellaris Launchpad,因为我已经拥有了它。 最初的CPU是8051,运行速度为2MHz,程序存储器为4kB。 新的将具有256kB或程序存储器加上16kB的RAM。

描述:大家好。我正在展示我的太阳能电池板太阳能跟踪项目。 两个LDR连接到太阳能电池板的两个边缘。因此它可以跟随太阳方向从东侧日出到西侧太阳落山。 该项目找到了更多的光强度区域,因此它有助于太阳能电池板产生最大功率。 两个LDR模拟信号在MSP430G2231中转换为数字信号。 在MSP430G2231中连续比较转换后的值,相应地,侧面太阳能电池板将转向哪个LDR值更高。
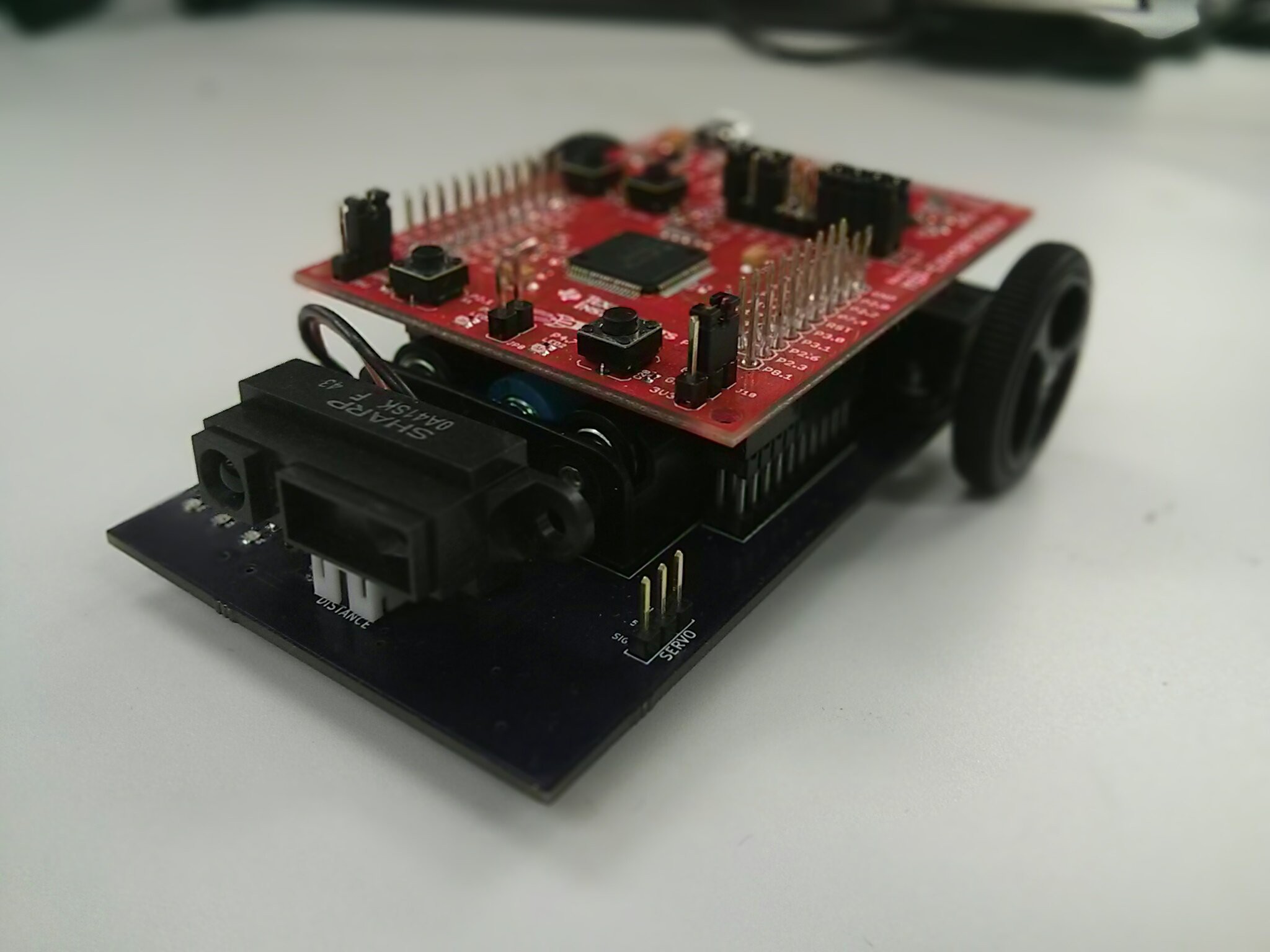
描述:BoosterPack将您的TI Launchpad变成一个功能齐全的机器人!BoosterBot连接在任何40针Launchpad下面,为它提供电池,轮子和一堆传感器; 非常适合想要开始使用MSP430和机器人技术的人,或者只是想要一个易于使用的机器人平台来构建。它配备了线路传感器和红外距离传感器,可以支持大量酷炫的演示!

描述:基本上,这个想法是在印度的ComicCon德里制作一些很酷的东西。 我是钢铁侠的忠实粉丝,我非常喜欢这个想法。 所以,我认为在漫画中做一个印度化的钢铁侠角色扮演会很棒,我的朋友们都很惊讶:D。铁人是他的弧形反应堆的象征。 因此,更好地建造一个弧形反应堆,但建造普通的老式电弧反应堆,我认为它应该更直观,并具有吨和吨的动画和功能。
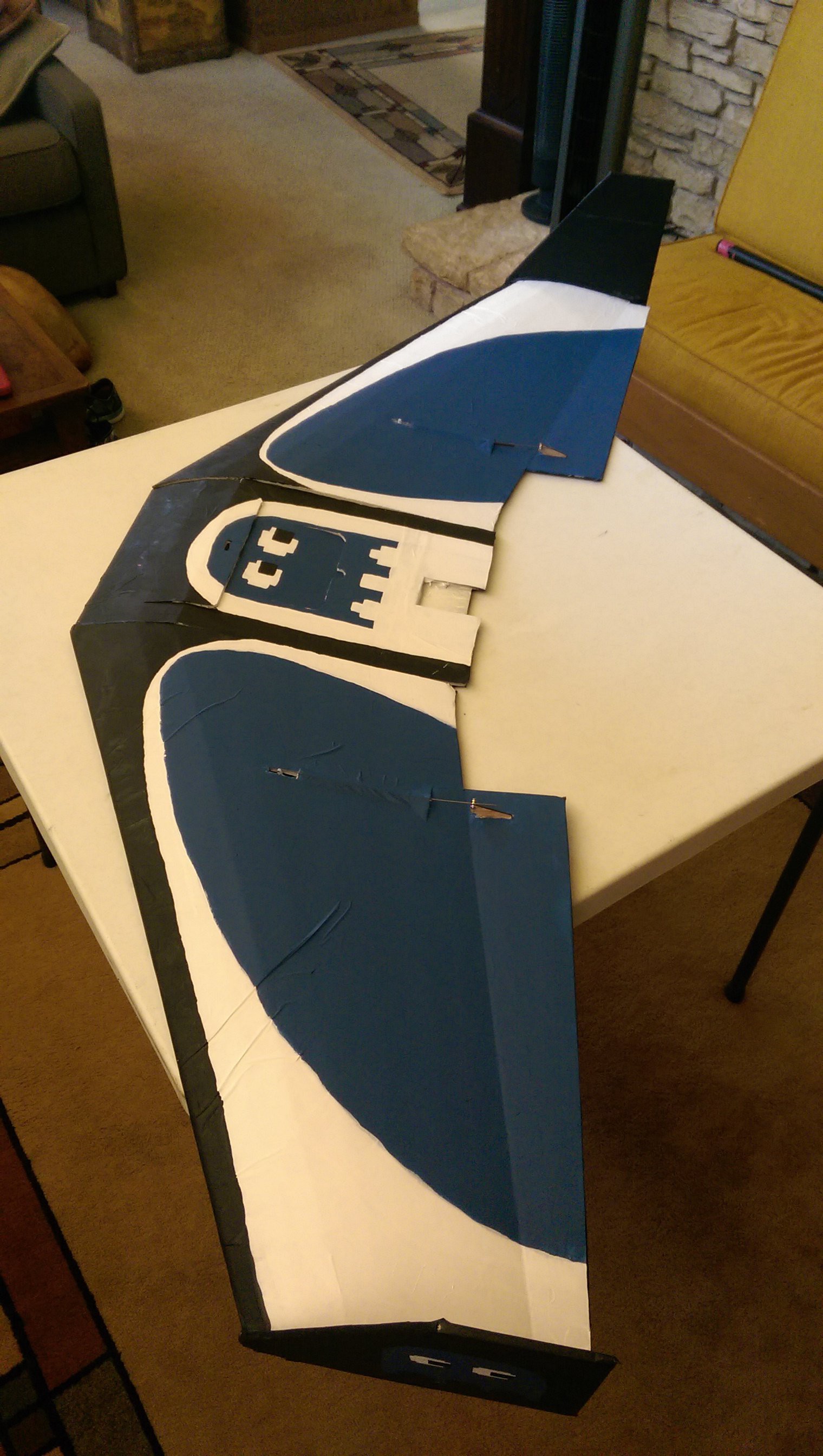
描述:将典型的遥控飞机(飞机,多旋翼飞机,直升机等)变成飞行电子平台,能够为任何数量的复杂任务配备。 想象一下,能够将相机绑在50美元的模型飞机上并告诉它沿着天然气管道飞行寻找泄漏。 空中作业自动化的能力一直保留给那些拥有巨大财政资源的人,即使对于小型任务也是如此。 这个项目将帮助我们其他人以低于100美元的价格带来一个有能力的无人机平台!

描述:HF Rx基于SoftRock Ensemble RXII。基本上你采用了softrock的成熟设计,移除音频接口并直接进入一个不错的ADC,并将其馈入beaglebone black linux板进行所有最终处理。
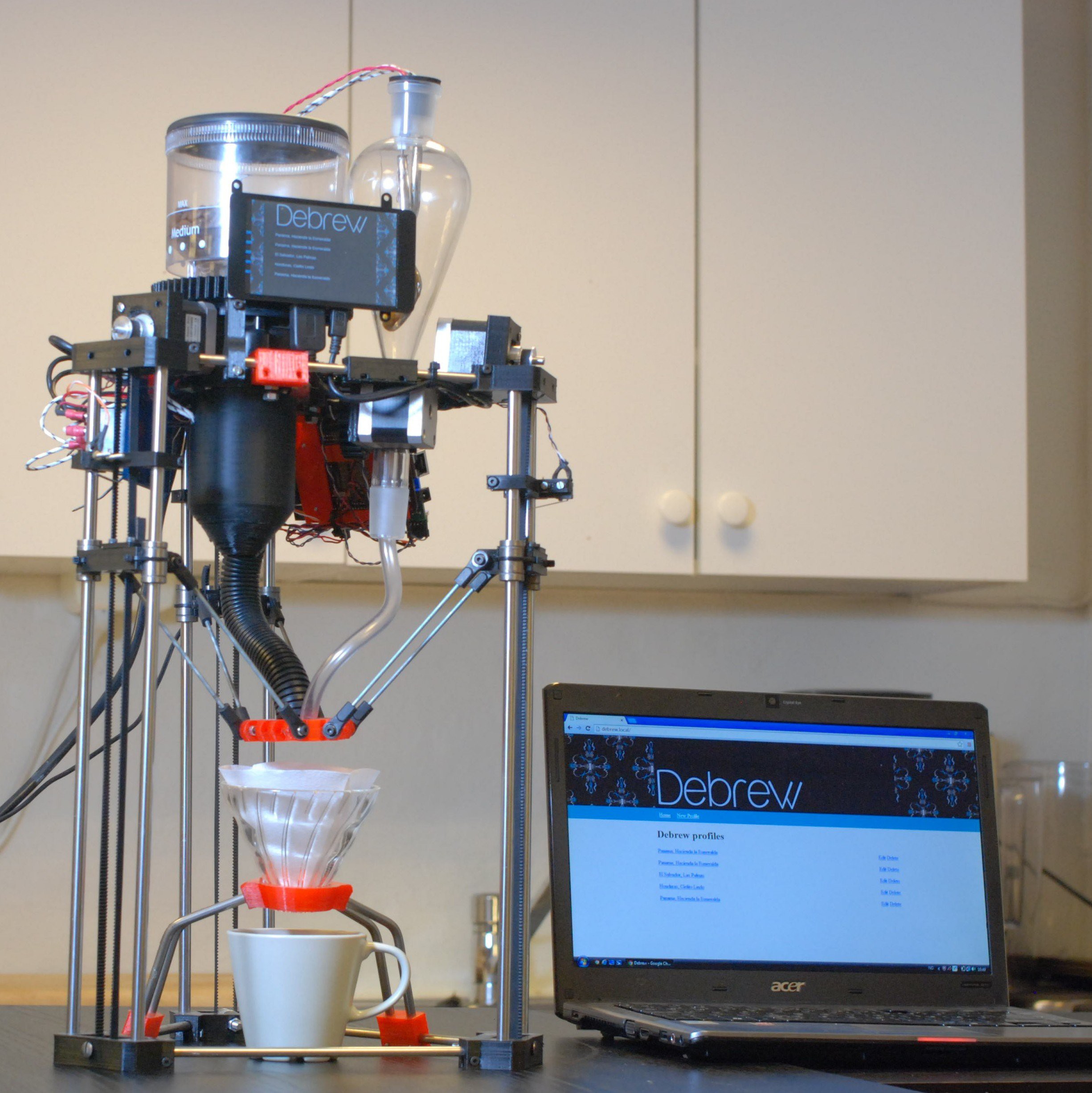
描述:德鲁巴是一个三角形机器人手工制作滴头咖啡。 水流量,研磨粗度和过滤器上方两者的位置由步进电机控制,水温由PID控制。 由于制作手工酿造的过程非常困难,因此可以在具有拖放功能的在线Web界面中可视化和编辑预浸/提取过程。 支持不同的配置文件/咖啡类型。 可以选择预定义配置文件的基本UI(来自Web UI)。 整个事情由BeagleBone Black / Replicape / Manga Screen组合控制。
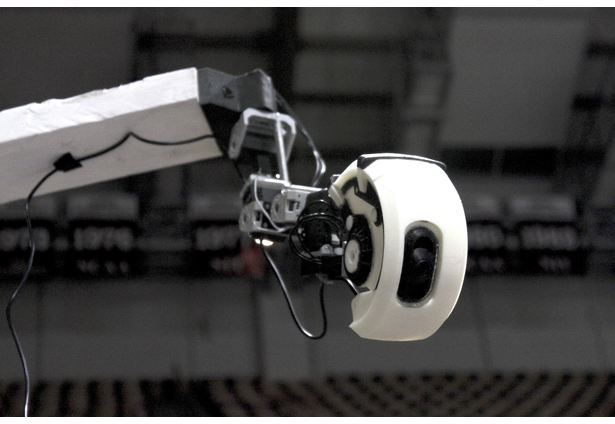
描述:http://www.youtube.com/watch?v=E_feC6NAiUA - 我们使用谷歌眼镜来控制最后连接相机的伺服臂。 谷歌语音拼写,att文本到语音,melodyne自动调谐用于将人声转换为GLaDOS语音。 通过双重眨眼触发手臂末端的nerf枪。 相机流显示在玻璃上以进行控制。

描述:该项目的目标是建立一个系统,以大约5分钟的间隔记录蜂箱中的数据,以便以后分析。 数据将包括蜂箱的温度,湿度和重量以及气象站的温度,降雨量和其他数据。
评论
0 / 100
查看更多
 Lucia li
Lucia li2019-08-19
1109

Copyright © 2024 苏州硬禾信息科技有限公司 All Rights Reserved 苏ICP备19040198号