Hackaday上的项目汇总-复杂的3D打印项目
收藏
分享
脑图
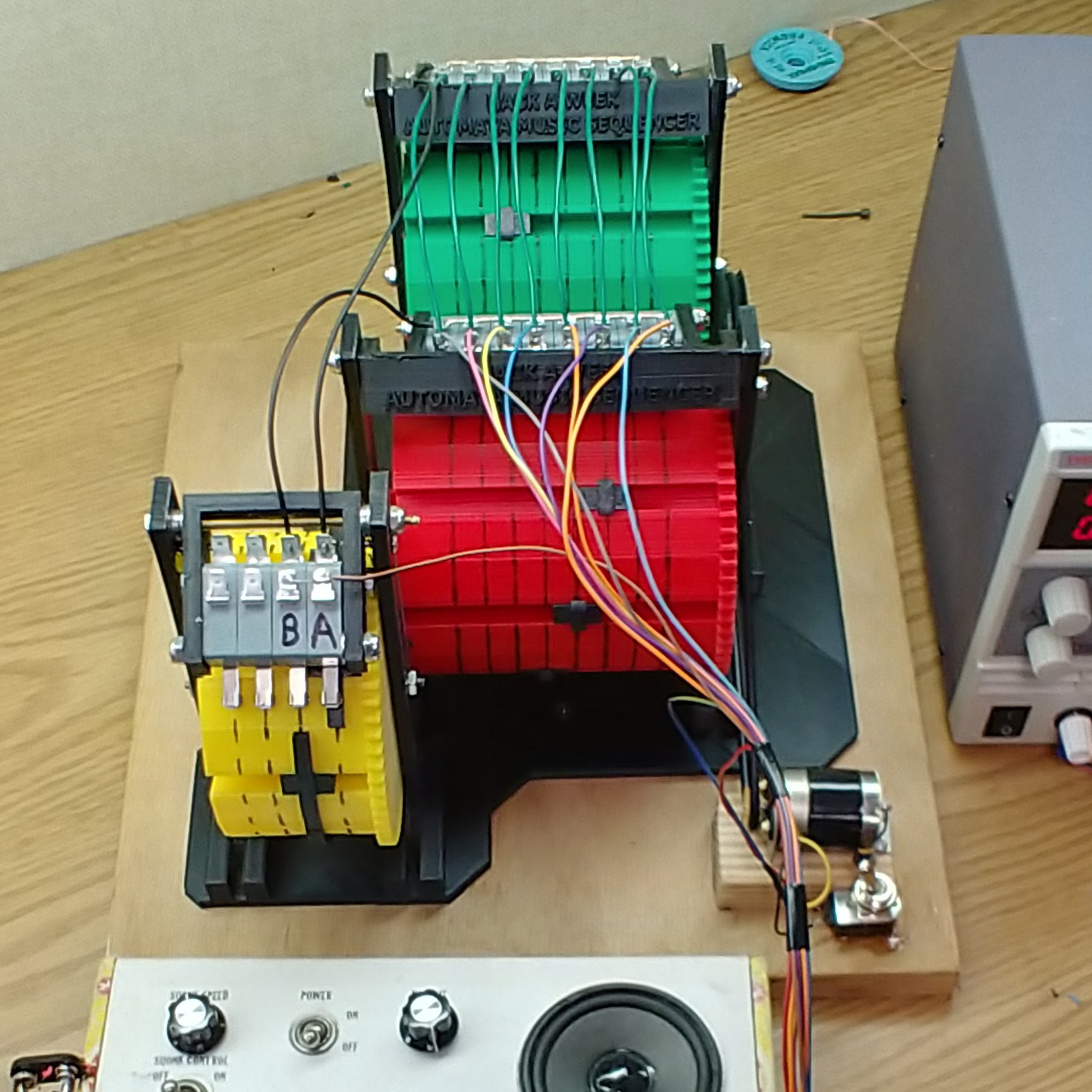
描述:这是时间测试结束音乐盒的变化。 旋转鼓触发微动开关,该微动开关激活调整为音符的555方波发生器,然后可以将其放大并发送到扬声器以产生声音。
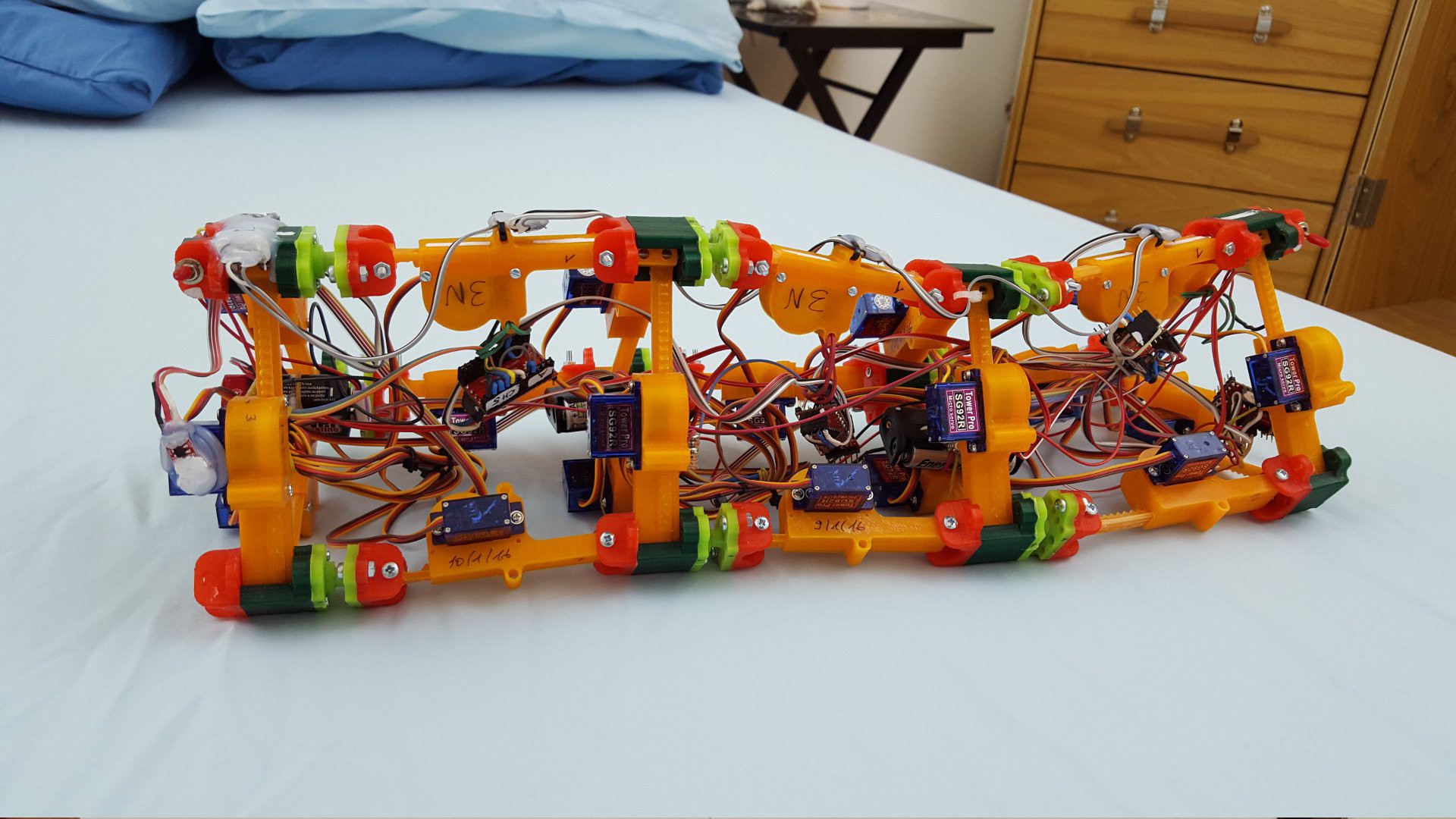
描述:基于Arduino和伺服SG92R的带有蠕动运动的3D打印机器人。
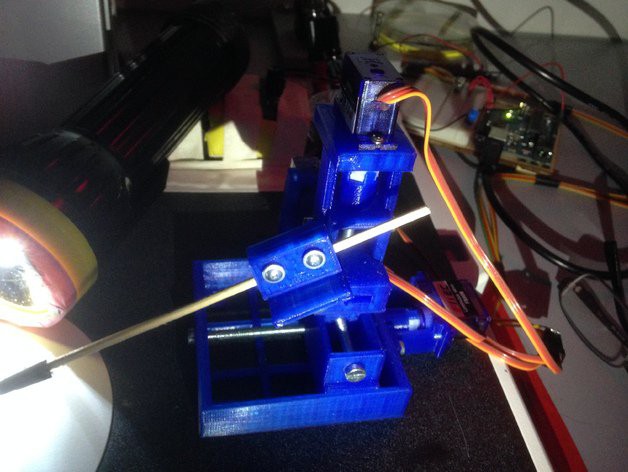
描述:例如 用于实验室环境。 精度为10微米级。
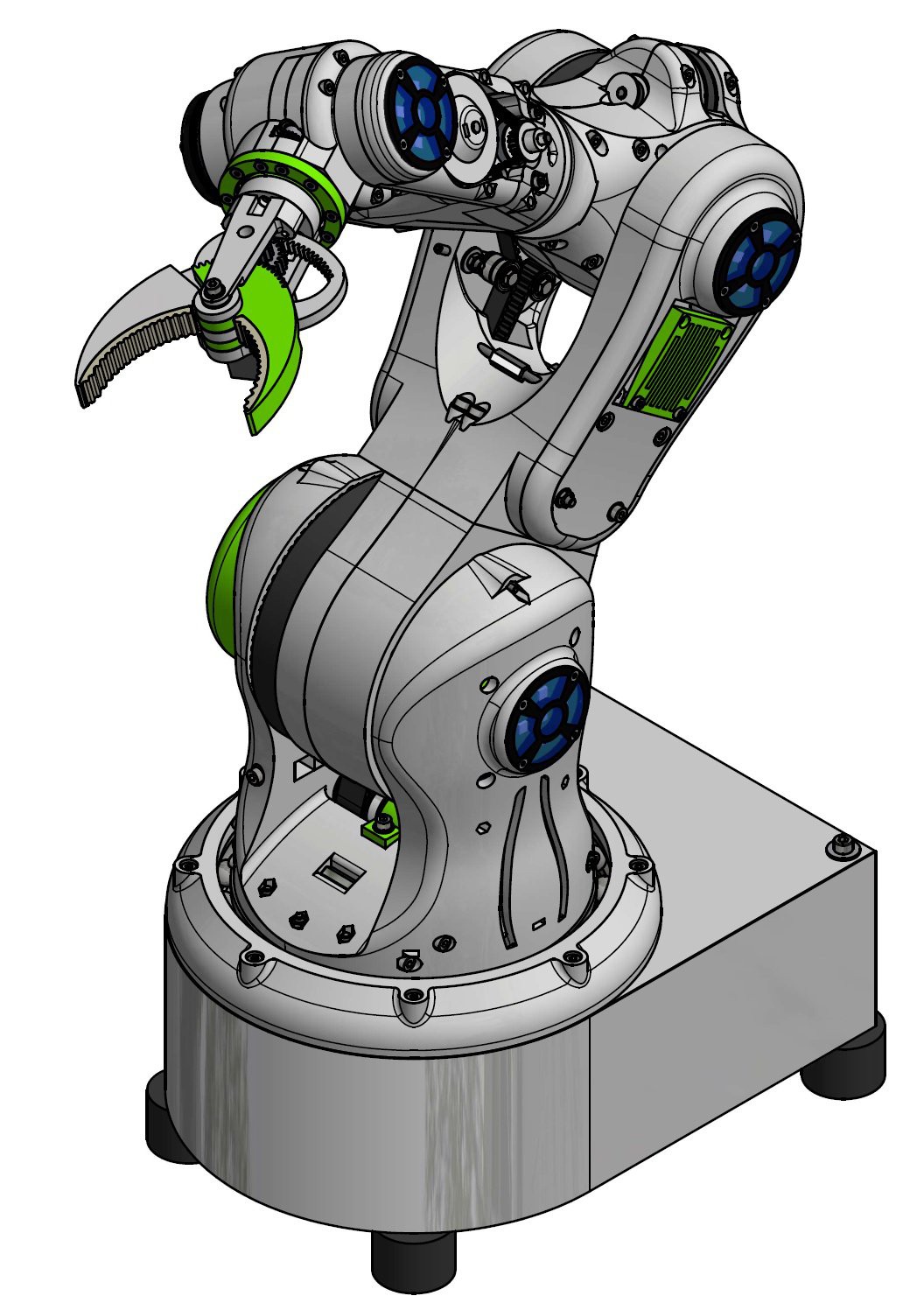
描述:我的可打印机器人手臂的灵感来自众所周知的工业机器人,但可打印。
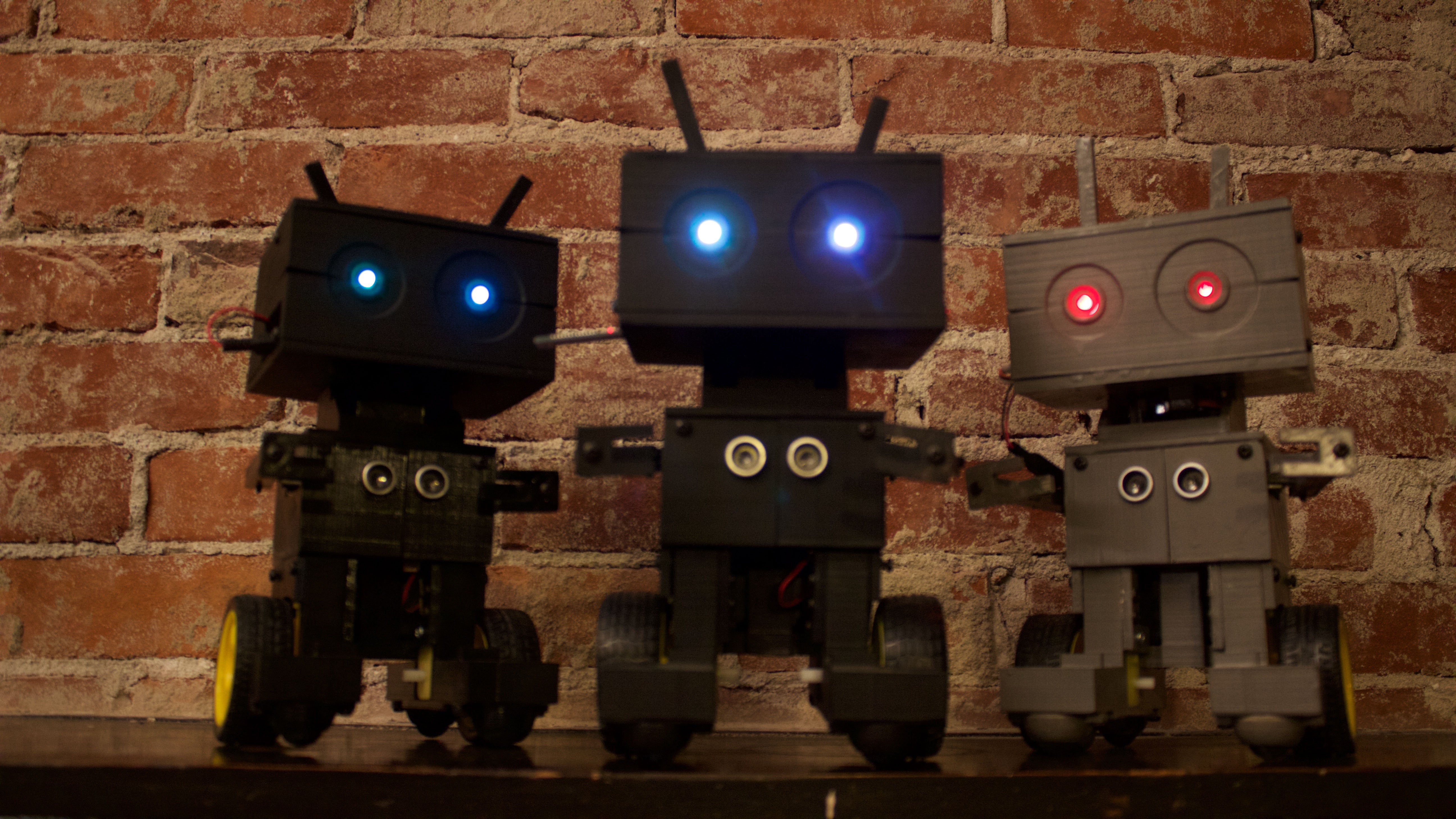
描述:这是一个很好的项目,当您了解更多Arduino项目时,您可以继续处理和修改。 Instructable在视频的前半部分完成了蓝牙启用机器人的完整构建。 只要您拥有3D打印机,这个项目就很容易实现,电子零件的成本仅为30-35美元左右。 3D打印总共需要35个小时,但可以在大约30分钟内组装和编程。 只需要2个螺丝刀即可构建,无需任何焊接。
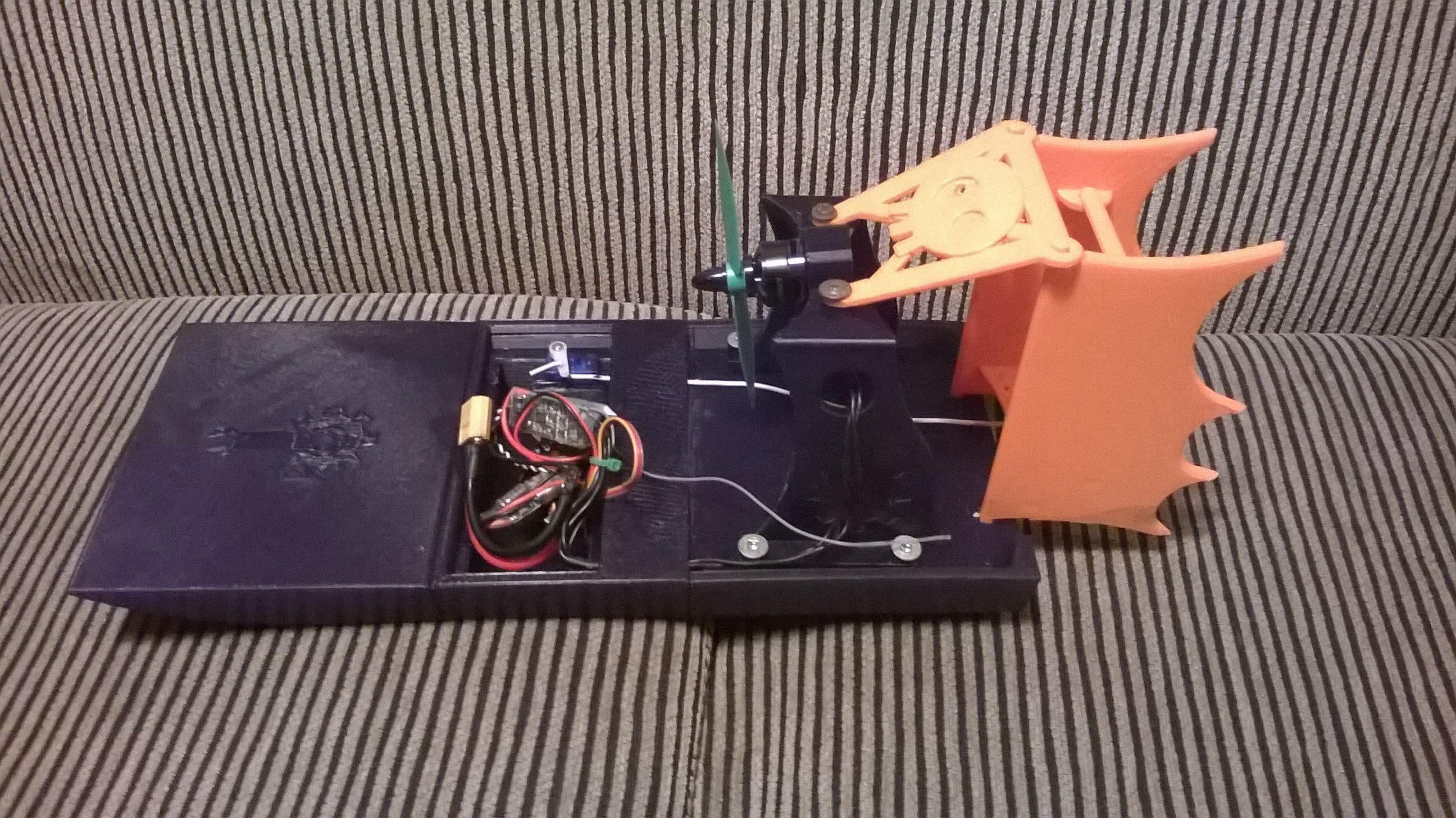
描述:我的一个朋友让我加强他儿子的Mini Alligator Tours沼泽船。 经过对模型的广泛“测试”后,我认为拥有自己的模块符合我的最佳利益。 仅限于6立方英寸的3D打印床,我选择将三个部件制成船体,通过锁定卡舌连接在一起。 我使用的电机是1806 2300kv无刷电动机,由3s 1300mah电池通过12amp ESC供电。 仍然(总是)使用更多的果酱...我只是讨厌做以前做过的事情,所以我为了好玩而扔了一点蒸汽朋克。 现在,如果我只能让它留在水面之上......
描述:这是一个受@andrias启发的项目,我们将尝试打印它,然后编辑设计。

描述:互联网连接航空可再生无人系统。全3D打印。
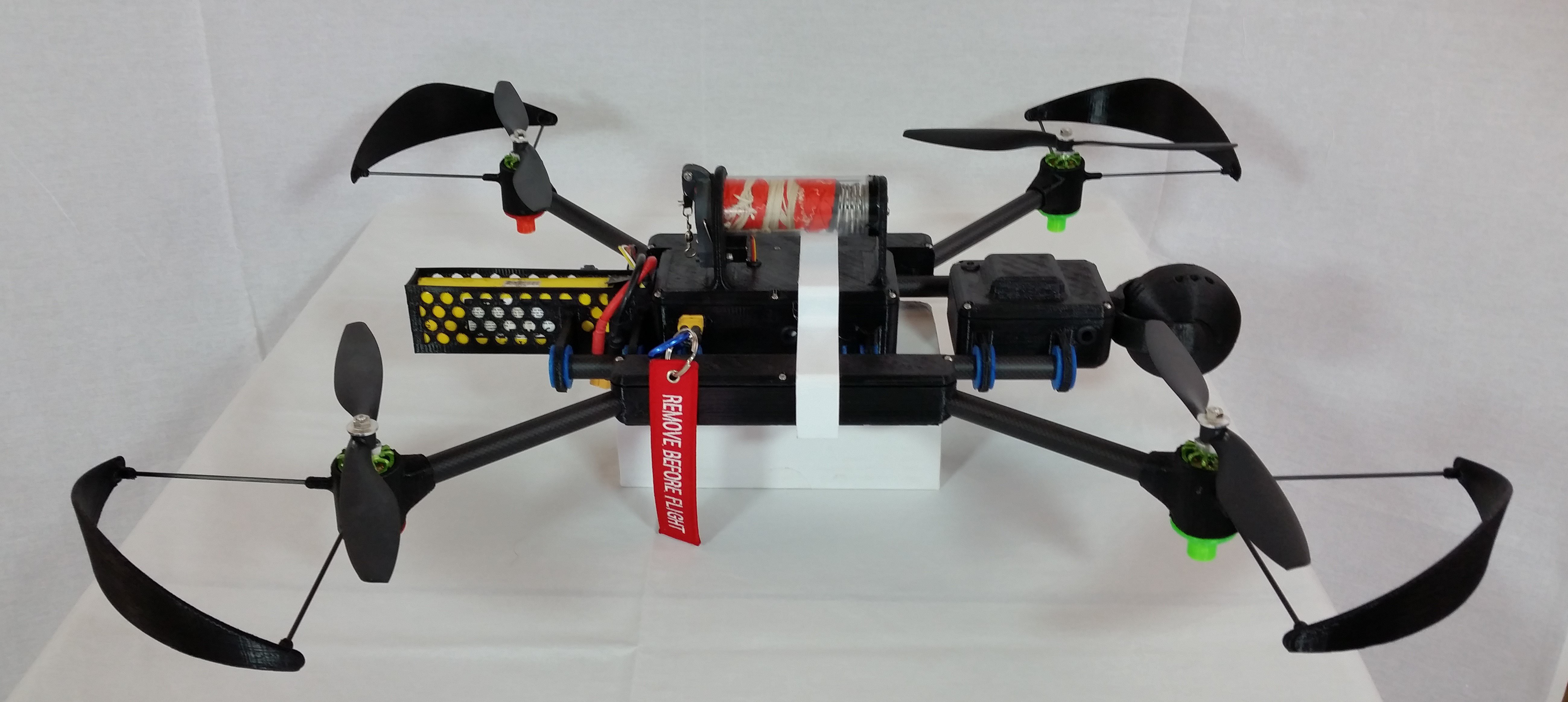
描述:我们即将结束我们的第二代四轮无人机LOKI的原型设计。 虽然它具有很多功能,但搜索和救援是LOKI能够执行的更为良性的活动之一。 我将简要介绍硬件,然后我们将讨论经过测试的场景以及我们认为尚未实现的无人机技术。
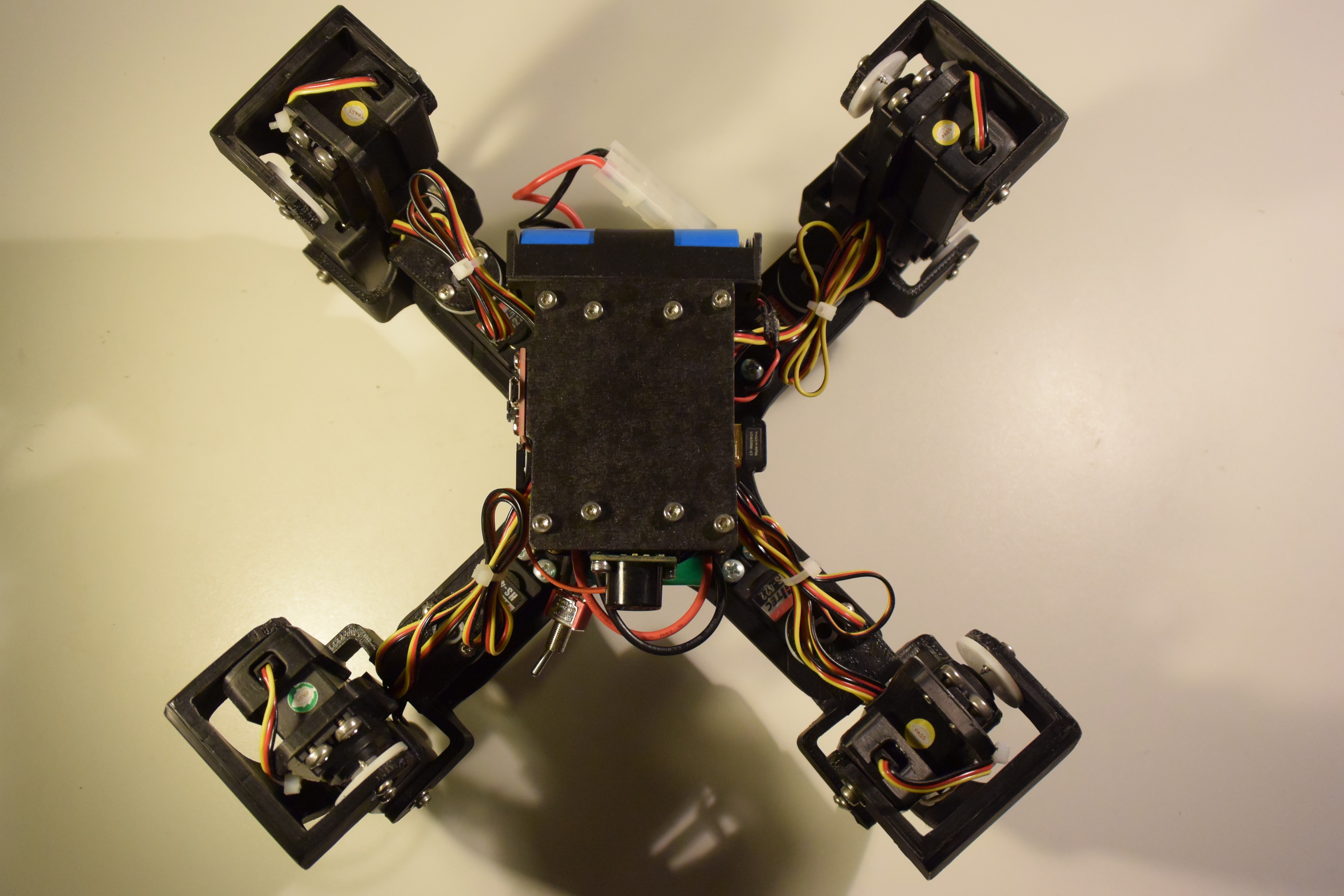
描述:Quadrup3D(发音为quadruped)是一个我已经工作了大约一年的项目,其目标是开发低成本的开源3D打印四足机器人平台。 由26个易于打印的3D打印件,轴承,螺母和螺栓构成; 它可以很容易地由打印机中有足够灯丝的人创建。 我创建这个项目是因为我买不起构建四足机器人所需的200美元机箱,而且没有任何其他低成本的开源选项。 这款机箱的打印价格低于15美元,任何人都可以使用。 虽然比较常见的Hexapod更难编程,但四足机器人需要少6个伺服系统。 由于伺服系统成本很高,因此将成本降低了三分之一。 Quadrup3D由计算机或移动设备通过串行蓝牙模块进行控制,但此后已经更新,以便携带超棒的Raspberry Pi Zero板载! 目前,Quadrup3D是通过与SpaceMouse的ssh连接从我的笔记本电脑控制的。
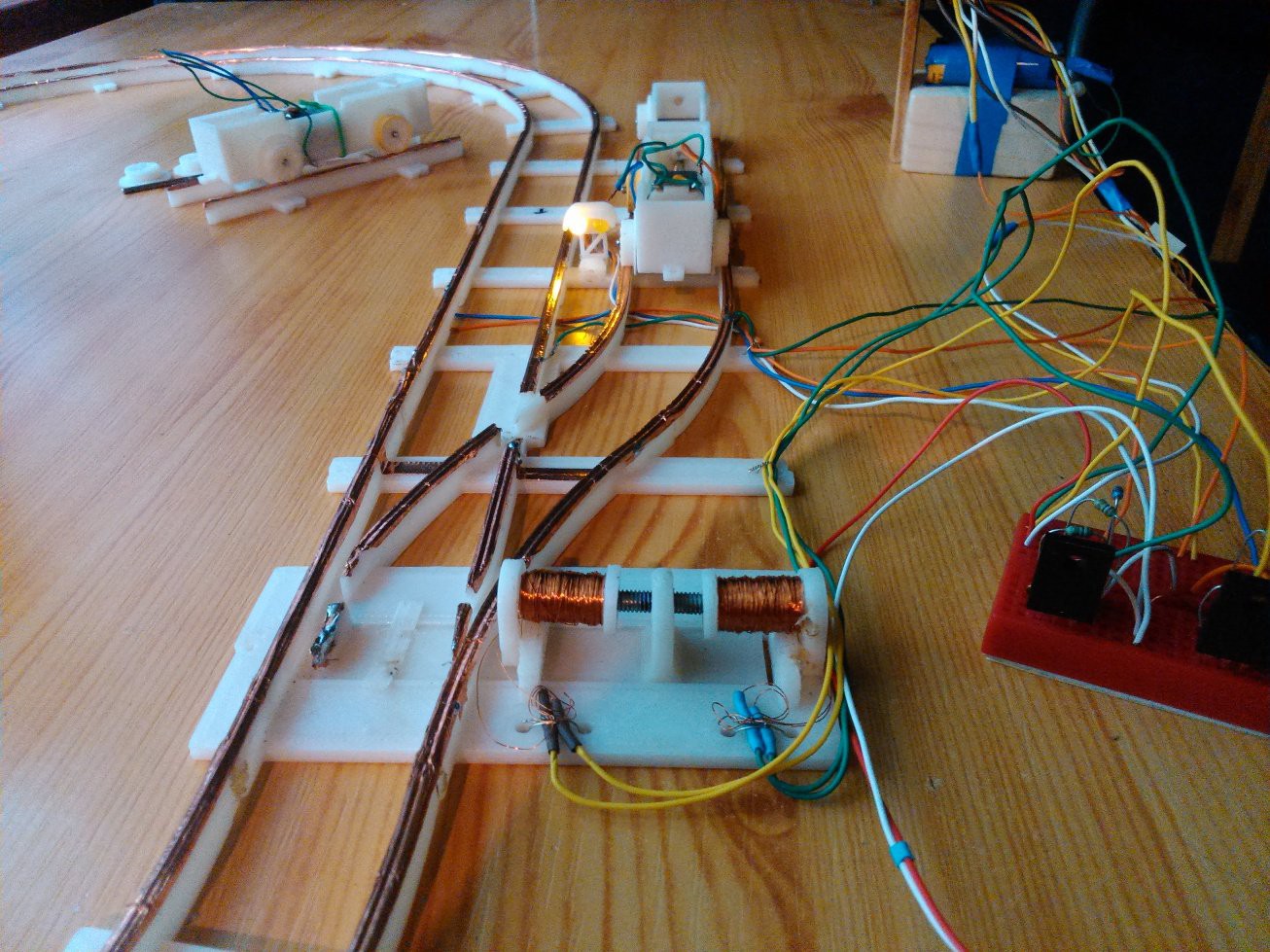
描述:我一直想要一辆模型火车,但看到天文价格,我立即摆脱了这个想法,直到现在。 该项目的目标是创建一个便宜的3D打印,全自动模型铁路系统,可以在家里建造。 模型铁路使用最便宜和最少的部件建造。 该项目的大脑是Raspberry Pi,因此整个系统可以通过互联网从任何具有网络访问权限的设备进行控制。 它非常适合家庭建模爱好者,学习和教学电子,编程,CAD建模,3D打印等。整个项目是开源的:原理图,3D模型,源代码都可以在GitHub上获得。 这个项目尽可能简单:没有RF,没有GPS,没有FPGA,没有CAN总线; 只有基本的电子设备和AVR,只需要一点C编程。 它会改变这个世界吗? 可能不是,但我们会看到......

描述:Dtto Robot是一种模块化可变形机器人,设计用途广泛,灵活且可自我重新配置。 模块化机器人的想法是通过改变模块的位置和连接,可以采用他们想要的任何形状。
评论
0 / 100
查看更多
 Lucia li
Lucia li2019-08-19
991

Copyright © 2024 苏州硬禾信息科技有限公司 All Rights Reserved 苏ICP备19040198号