Hackaday上的项目汇总-微小的机器人项目
收藏
分享
脑图
描述:这是一个微型可编程机器人,带有BLE,距离传感器,麦克风,蜂鸣器和LED。 我的目标很多:1。 EdTech:我看到孩子们在一个普通玩具周围的ADHD营地互动时受到启发。 我希望这个机器人能够促进互动并教授社交技巧。 Arduino:一个简化的界面,让更多的人可以尝试机器人,看看它是什么。 机器人爱好者和有抱负的机器人爱好者:我会把它打开并记录下来,这样你就可以升级(想想龙珠-Z中的悟空)并成为超级动力工程师。 4.多个机器人游戏:相扑,夺旗,棋盘游戏。

描述:Otto LC是Otto DIY机器人的底盘,可以使用激光切割机(通过LC)制造。 它主要用于从胶合板上切割,但也可以用其他材料制成(可能需要稍微调整一下)。 除了原始机箱的功能外,它还允许安装模式开关以循环通过不同的程序。
描述:支持蓝牙LE的微型机器人由玩家的手机控制并配备了红外加农炮。 在桌子上的真实世界战略游戏。

描述:提出了廉价机器人平台的开发。 我们的目标是提供一个完整的硬件工具作为低成本实验室,以说明控制系统。 该平台的功能允许研究人员和学生从基础技术到复杂技术(例如从PID到多代理系统)实现。 设计和开发的硬件使用以下功能执行单个或多个机器人控制的实验:运动,通信,感知和自主决策。 我们用这个平台说明了三种不同的控制技术。

描述:我们正在为教育市场建造小型机器人和附带的软件。 目标是机器人将为紧凑且具有成本效益的教育实验设立新标准。一组机器人将由基于Raspberry Pi的主系统管理,现在命名为“神机器人”。 这将处理多路复用IR通信,使用它的摄像头提取机器人位置以及与互联网等通信。它也将是学生开发应用程序的平台,对于大多数用途,机器人本身可以使用“标准”固件。
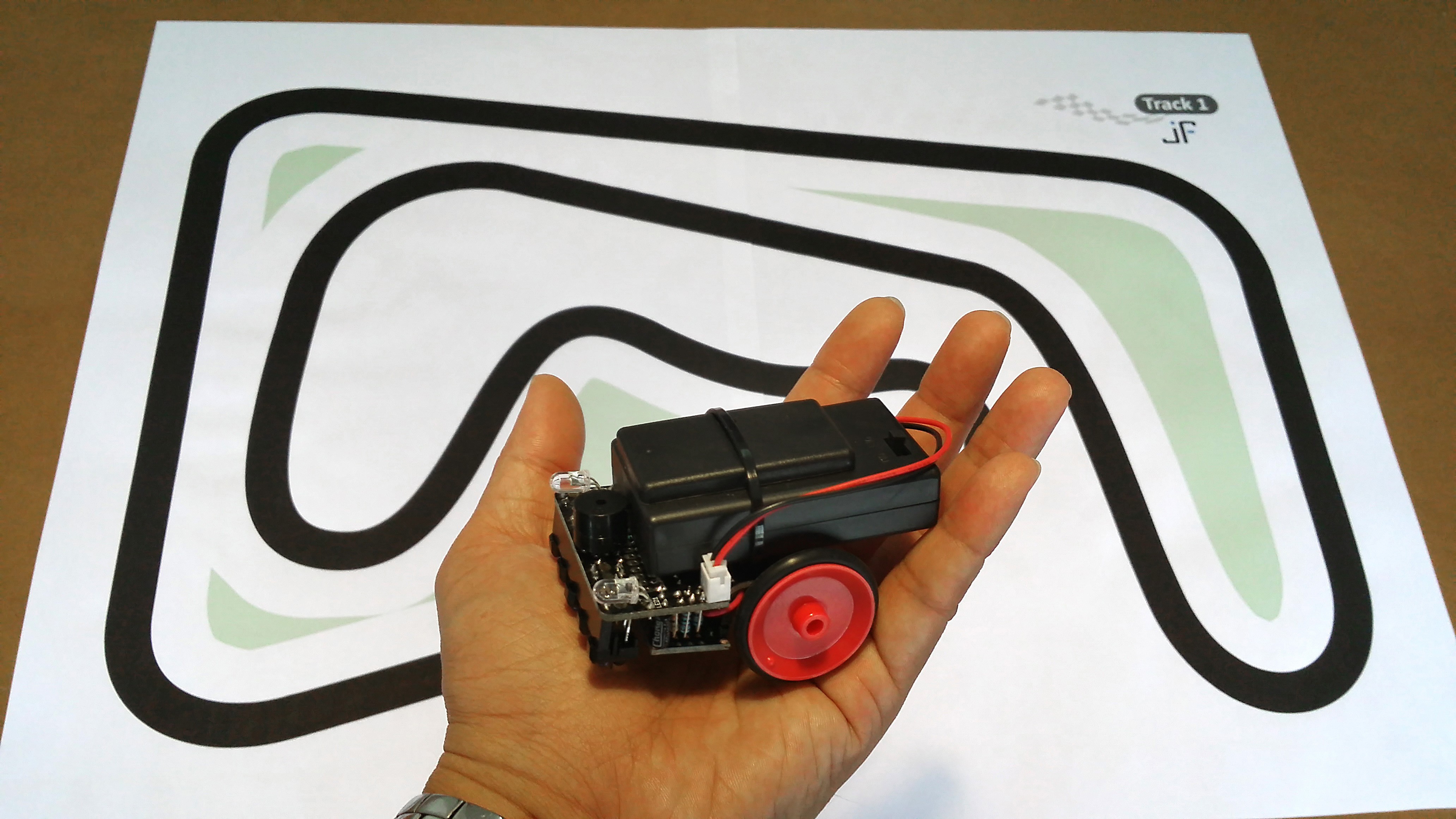
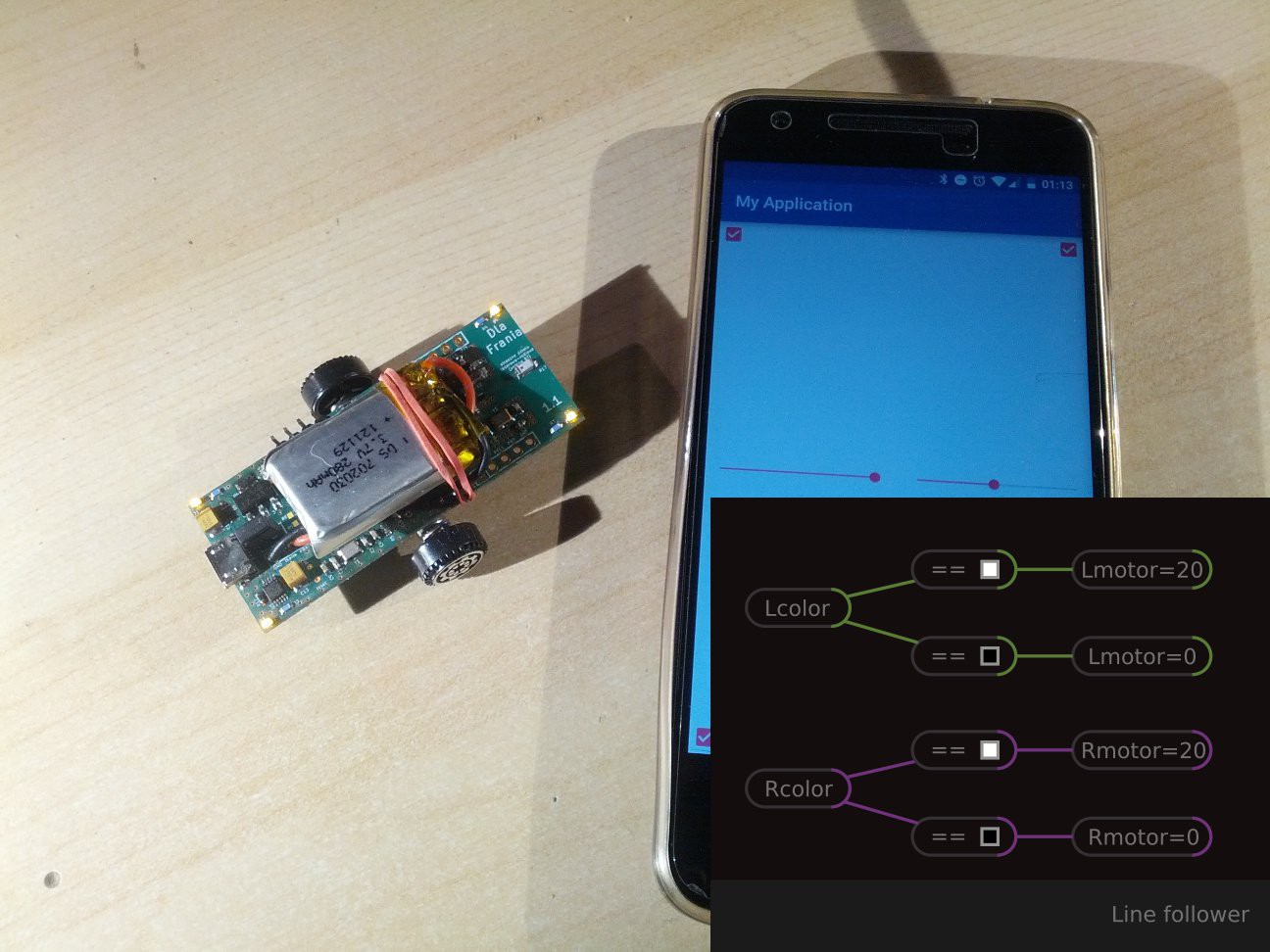
描述:对于这个项目,我们来自jolliFactory设计了另一个Line Follower,我们恰当地命名为jolliBot。
描述:最近从我当地的Radioshack的尸体中清除了大量的TV-B-Gone套件 - 从而ATtiny85 - 这个项目的目标是通过了解这个小芯片可以走多远来了解微控制器。
描述:我们在爱沙尼亚举办的黑客马拉松活动开始了这个项目。 在48小时内,我们用几个小型伺服系统,一个锂电池和一个BL600 BLE模块构建了一个工作原型。 从那时起,这件事已经走了很长一段路,现在已经发展了将近一年。最终版本有Invensense IMU,Nordic BLE SOC和无线充电。 一切都建立在一台pcb上,目前大多数机械都是3D打印的(大多数是由Shapeways打造的,因为我们自己的打印机可以真正做到所需的精密部件)。 我们从这个项目中学到了很多关于惯性传感器的知识。 由于球体内部的差动驱动机器人的工作方式,第一个版本几乎无法控制。 只有一点(理想情况下)接触地面方向控制几乎是不可能的。 最新版本使用高度集成的IMU,在运动控制器中实际进行了大量的集成和过滤,因此BLE SOC中的M0内核有更多时间来处理其他所有内容。
描述:我决定在我的行走机器人系列中真的需要一个六足机器人。 我有一堆舵机,伺服控制器和PyBoard,所以为什么不呢? 唉,我从来没有完成它的编程,它花了一些时间在架子上。 然后我拿到了我的OpenMV板,并决定将它放在机器人上。 亨克自告奋勇。

描述:这是我对步行机器人的第二次尝试,我使用了我在第一次学到的所有知识。 它不需要激光切割或3D打印部件,只需要塑料盒和舵机随附的任何东西。 它有一个简单的Pro Mini板载,可以通过蓝牙与台式电脑进行通信,进行更高级的处理。 现在它的感官只有一个加速度计+陀螺仪,但它可能会改变。
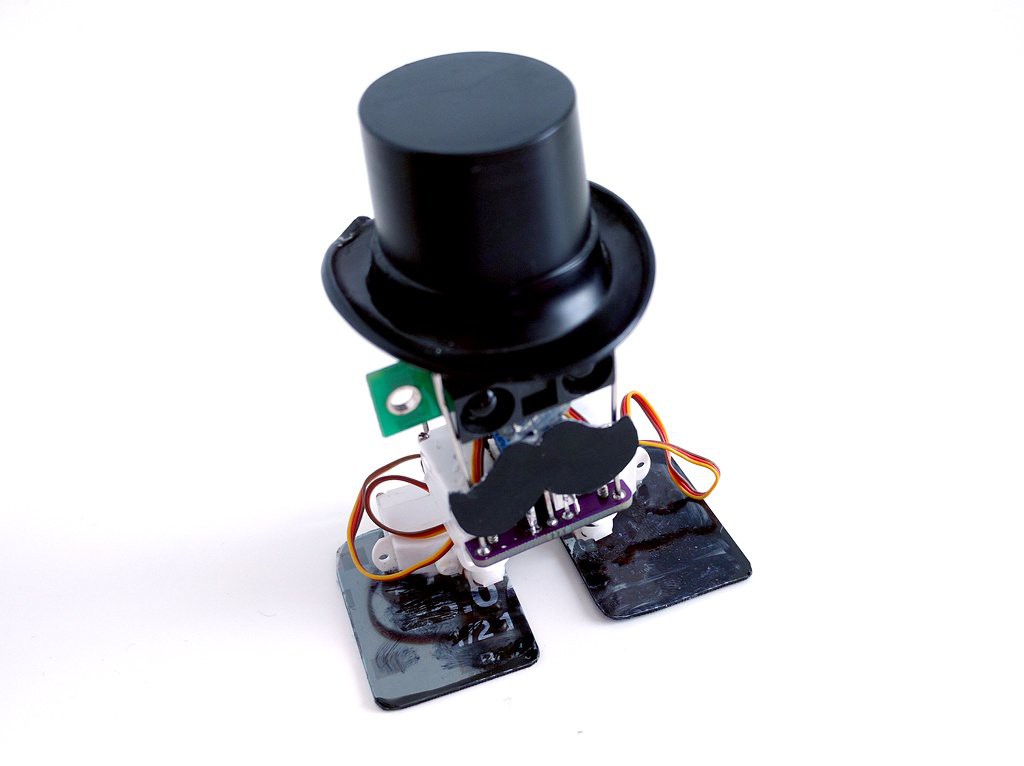
描述:鲍勃是一个众所周知和流行的机器人设计。 这是尝试制作一个非常小的版本。
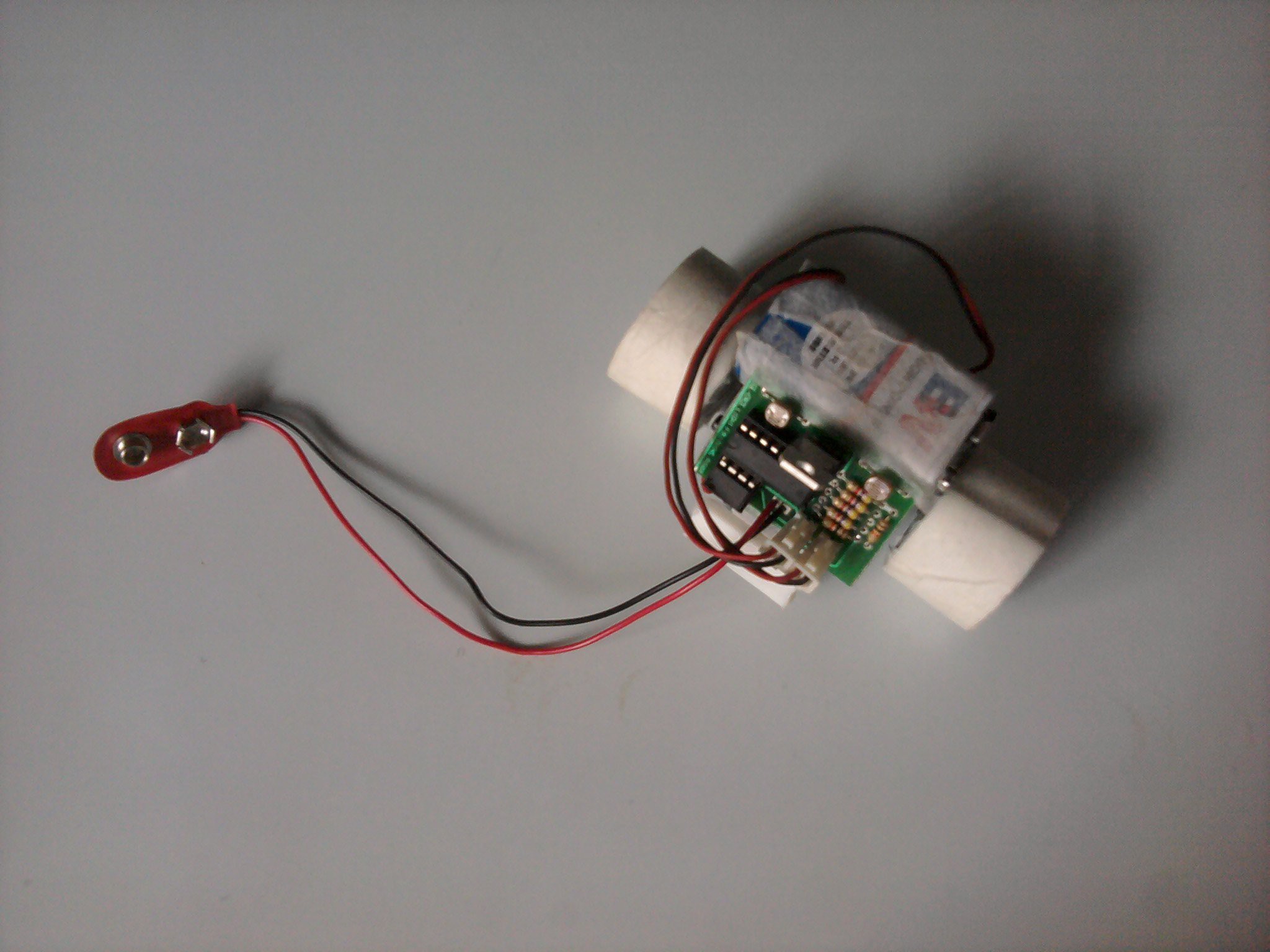
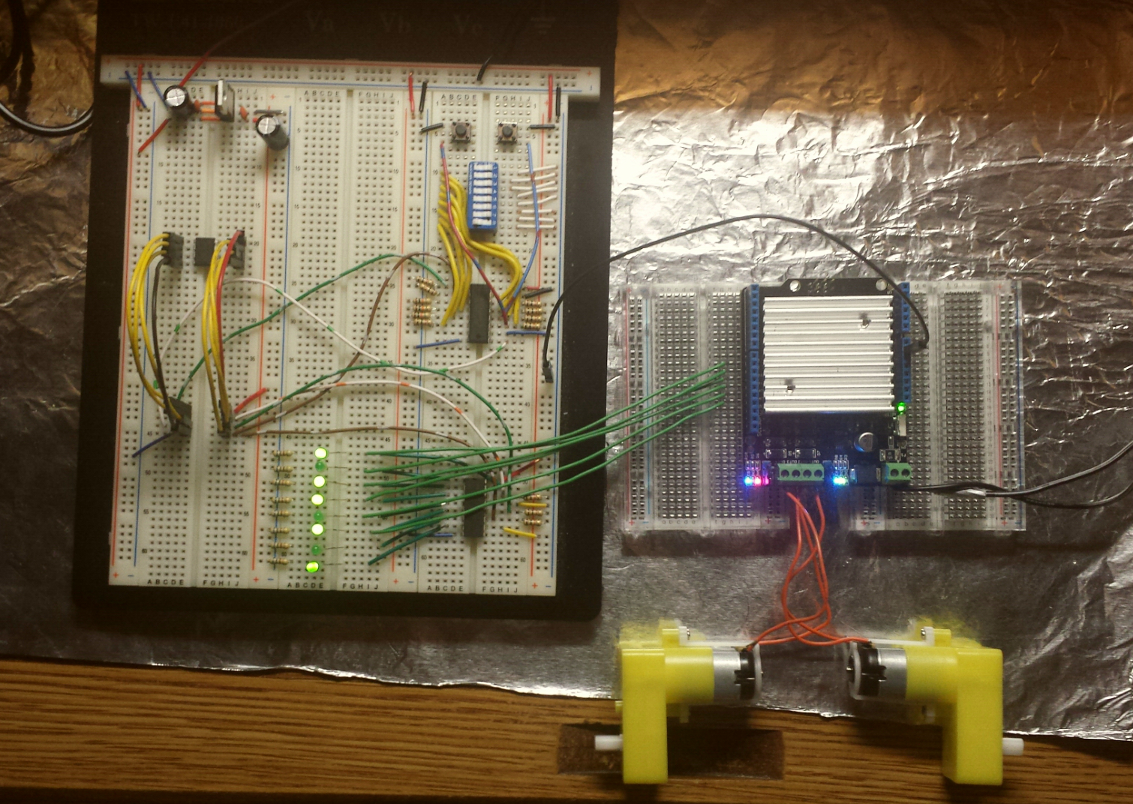
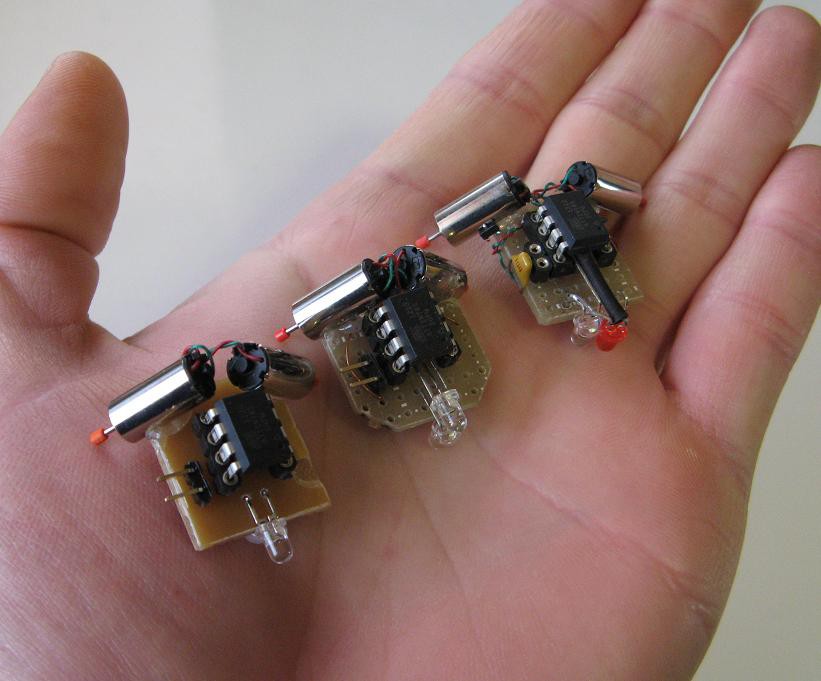
描述:它具有两个LDR,一个差分放大器和一个驱动两个有刷直流电机的电机驱动器。 当光线落在其中一个LDR上时,机器人另一侧的电机被激活。
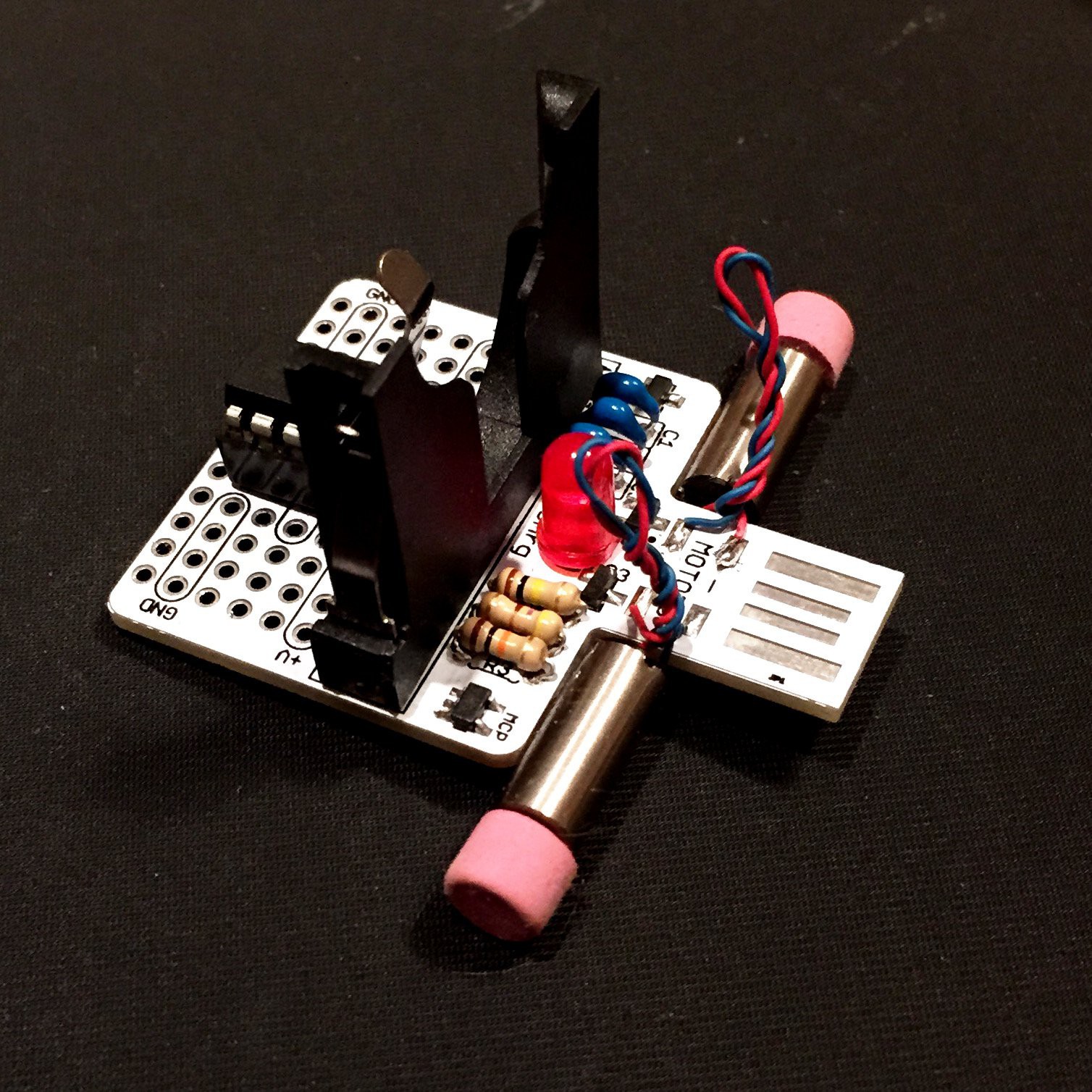
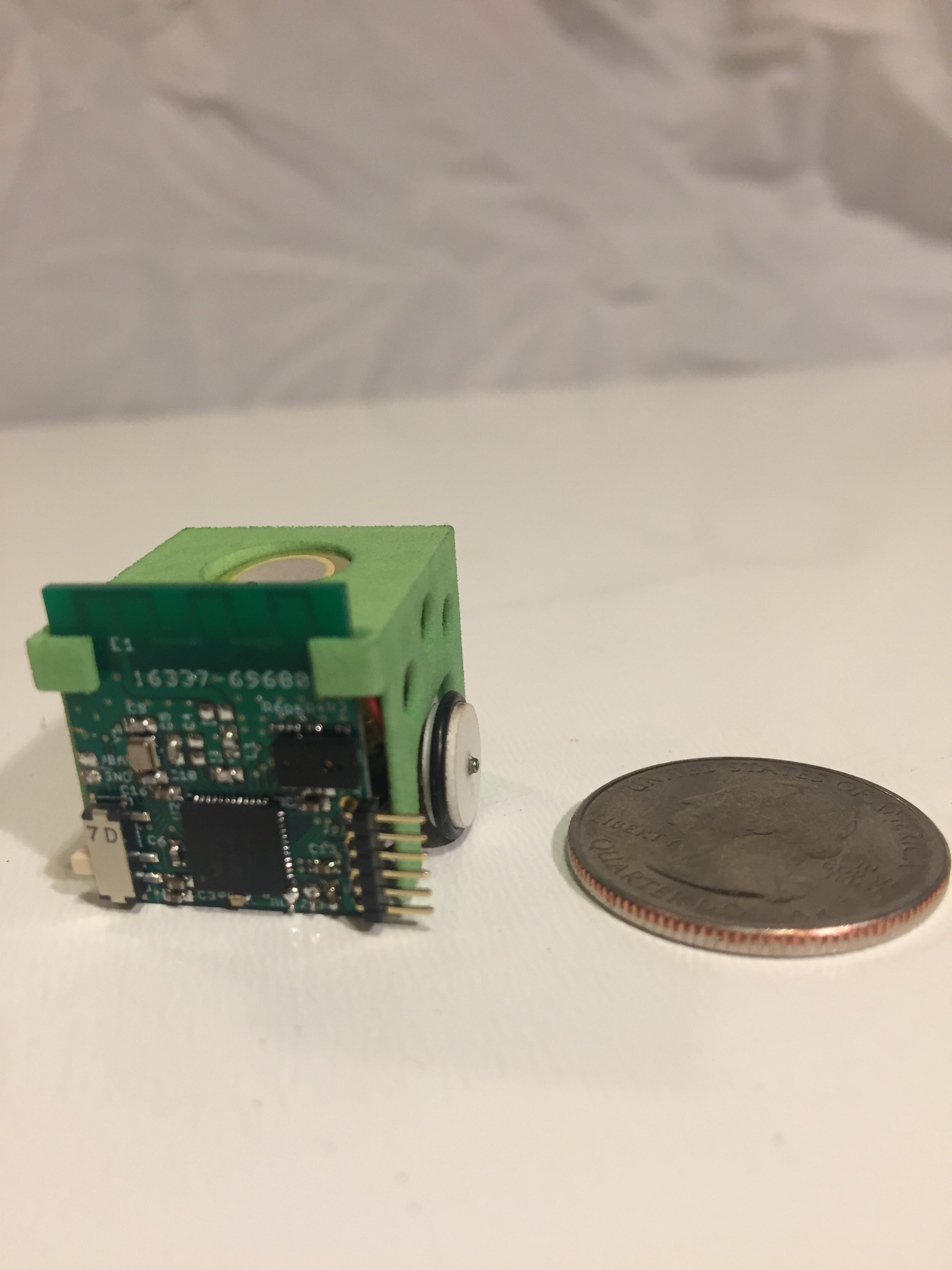
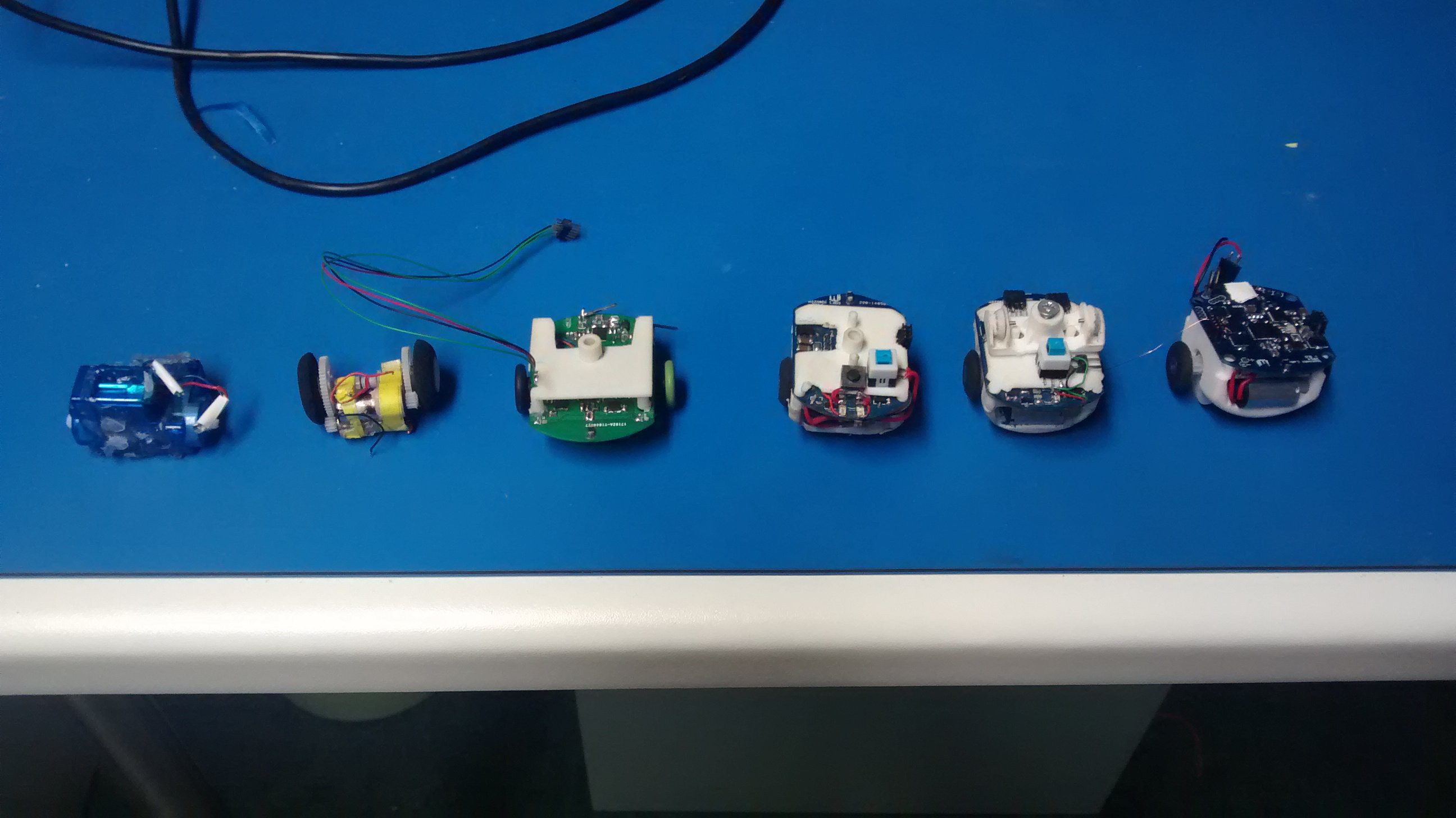
描述:这里的想法是为嵌入式计算和简单机器人创建一个教育开发平台。 Shlonkin创造了一系列微型机器人(https://hackaday.io/project/581-Tiny-robot-family),每个机器人都有不同类型的传感器。 在这里,我们采用这个想法为它创建一个PCB,并通过USB添加板载电池充电。
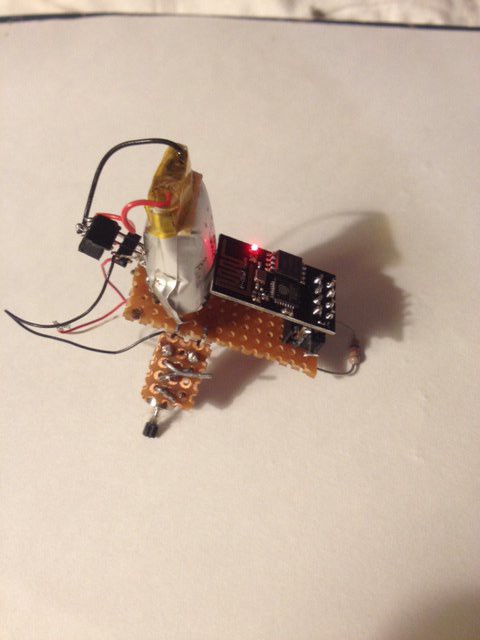
描述:当Hack一天宣布他们的Wings,Wheels和Propellers比赛时,我决定使用ESP8266 -01制作一个小型BEAM型机器人。我有一些旧的迷你helecopters的部分所以我把它扔在一起。
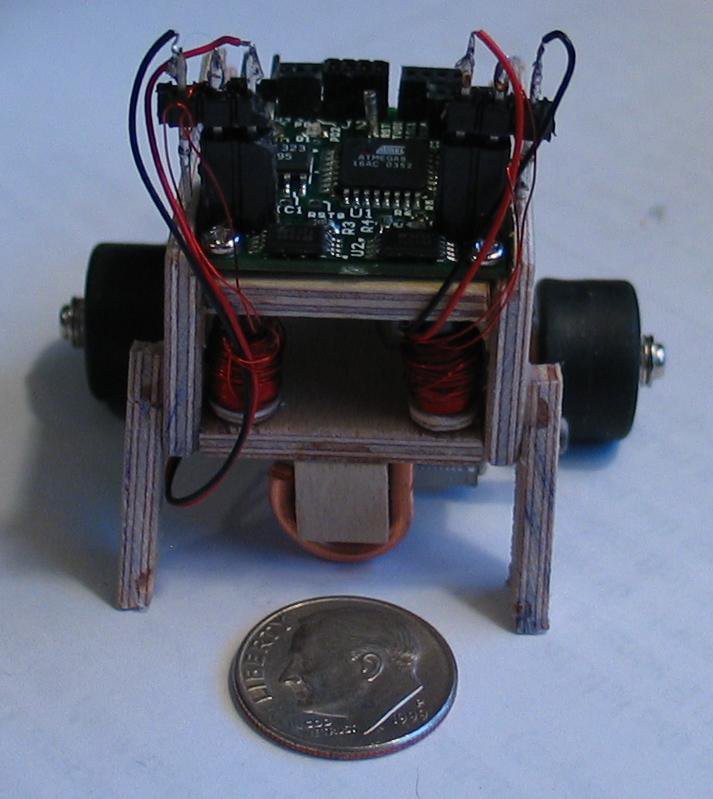
描述:我想使用“Megabitty”来驱动两个小型电机,但电机的电感太低,以至于控制器使用的锁定反相驱动频率。所以我制造了一些电感器,将它们与电机串联,电流消耗从116毫安下降到大约6毫安。
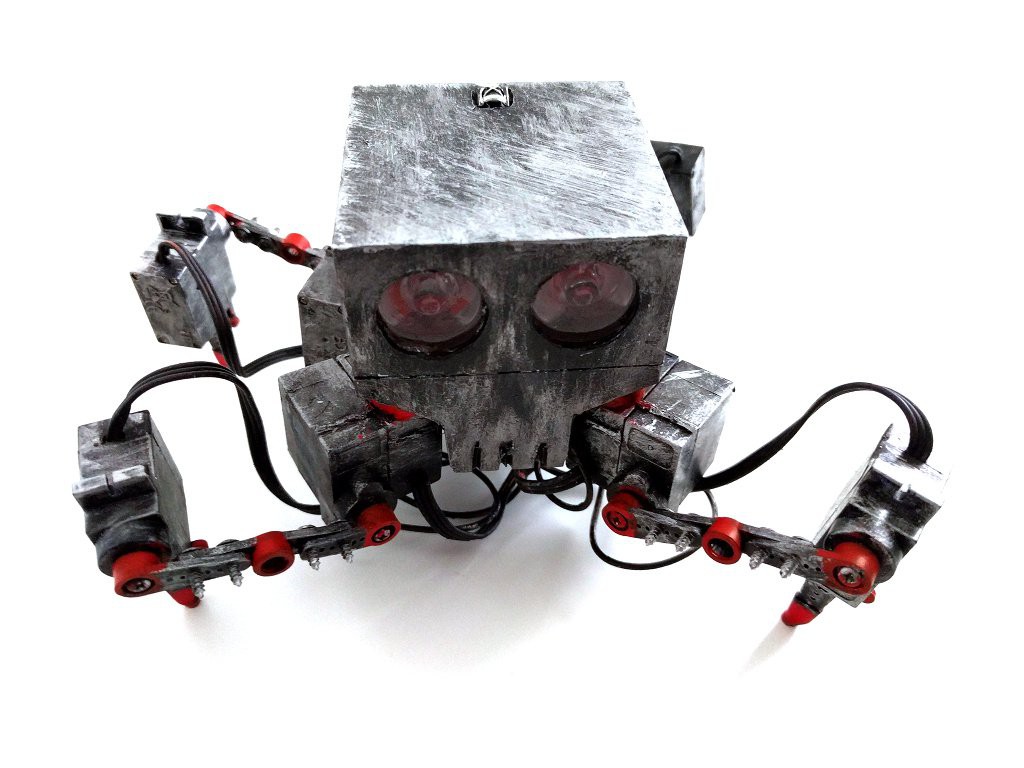
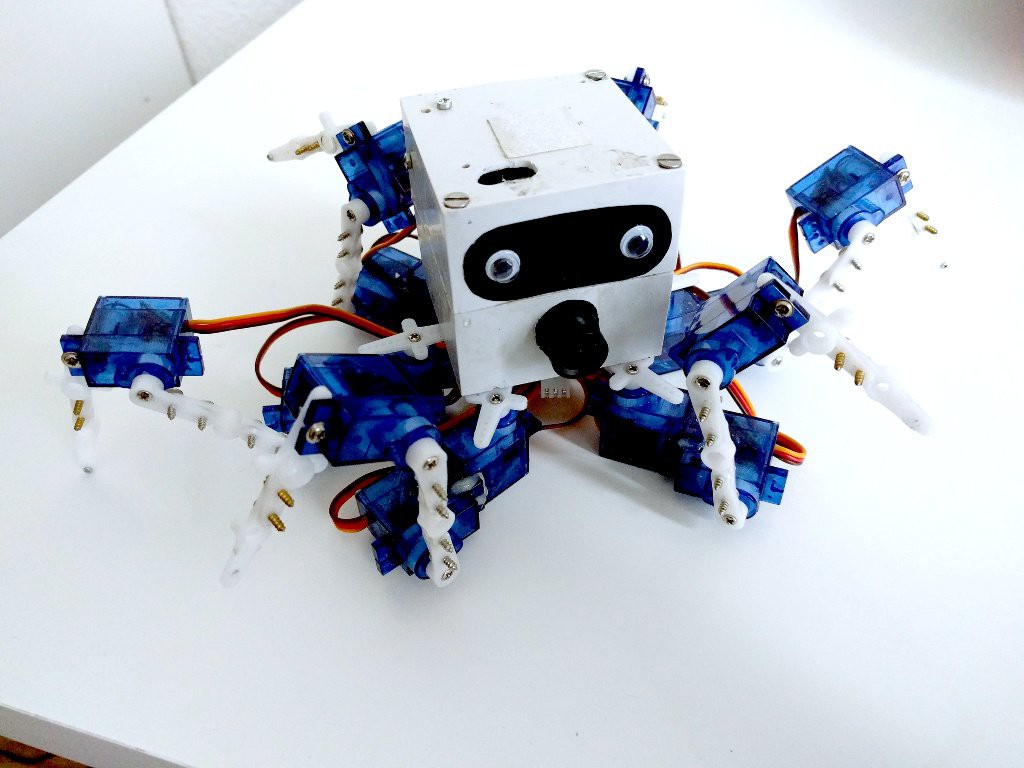
描述:手提包是一种四足的蜘蛛状机器人,设计为便携式步行机器人实验的简单基础。 它很容易制作,但很容易修改和扩展。
描述:这是我不断增长的基于ATtiny控制器,寻呼机和光电晶体管的小型机器人系列。

描述:这是我在Kubik,μKubik和Nano-Kubik之后建造的第四个四足动物。 这一个字面上适合您的手掌(您可以在照片上的乐高积木旁边看到它)。
评论
0 / 100
查看更多
 每日资讯
每日资讯2019-08-19
2033

Copyright © 2024 苏州硬禾信息科技有限公司 All Rights Reserved 苏ICP备19040198号