Hackaday上的项目汇总- 使用Digikey部分的项目(1)
收藏
分享
脑图
器件型号
使用Digikey部分的项目(1)
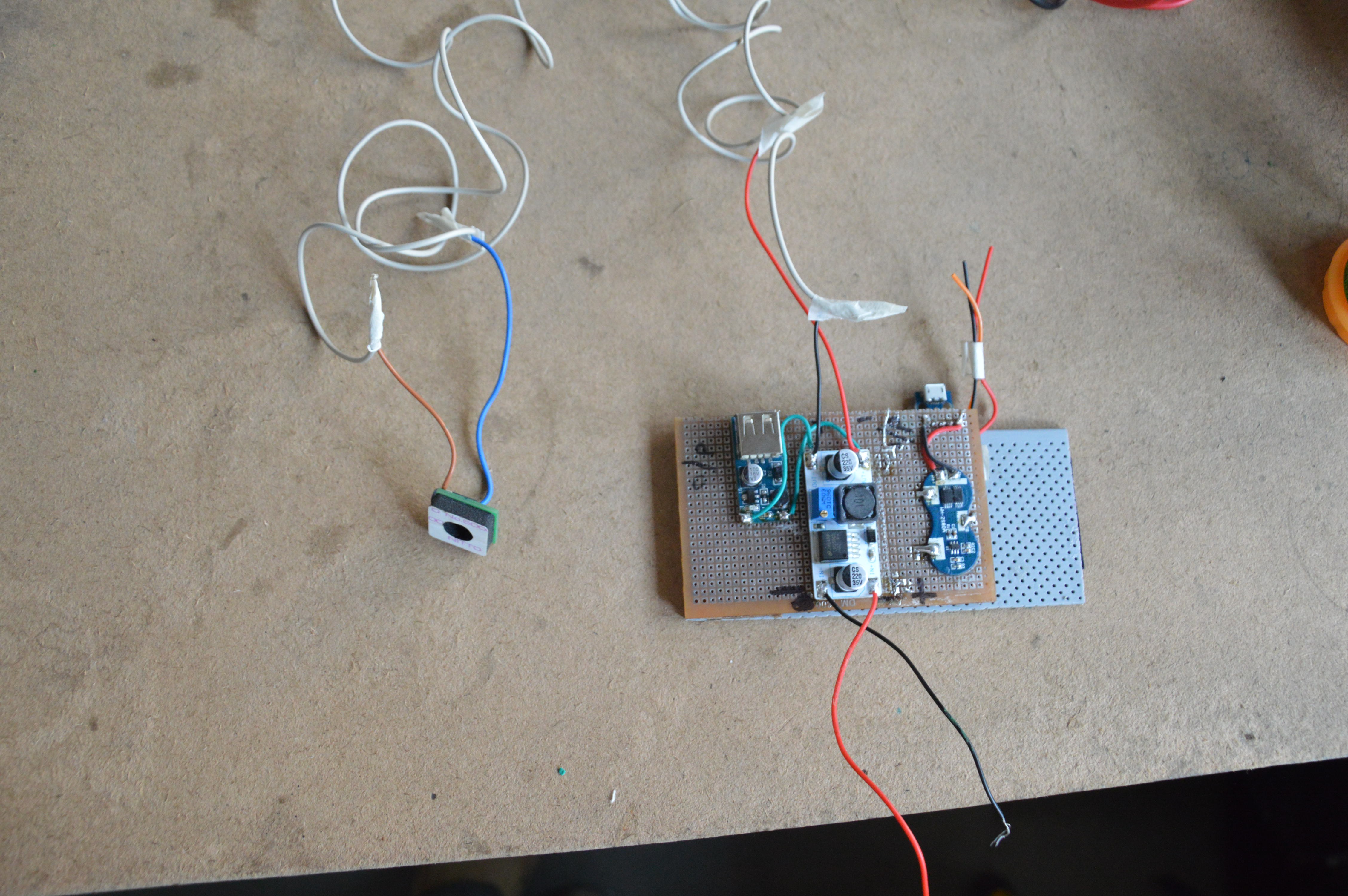
描述:电磁升降模块。
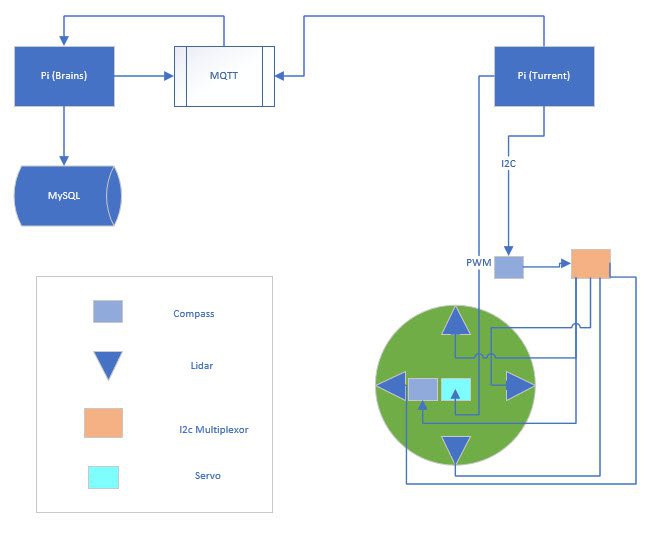
描述:通过i2C多路复用器连接到Pi。还有2个Compass模块 - 一个固定,一个在可移动电流上(由伺服旋转),允许校准。收到扫描命令(通过MQTT)后,Turrent将通过两个罗盘校准,然后以1度的间隔读取。由于激光雷达每90度固定在可移动的电流上,因此电流仅需要移动89度即可捕获整个360激光雷达距离。数据通过MQTT反馈到将数据转储到mysql数据库的程序中。

描述:HERO传感器是安装在平移/倾斜装置上的传感器的融合。配备FLIR相机,红外温度传感器,空气质量传感器和安装在云台机构上的距离测量传感器,这种自主传感器套件将在对救援人员不友好的环境中扫描区域以获得可识别的热量特征。它还将监测该区域的空气质量,以便救援人员知道如果他们需要进入该区域如何准备。通过与安装它的平台(机器人,无人机等)进行通信,它将提供所识别物体的3-D位置,以便可以快速有效地导航。
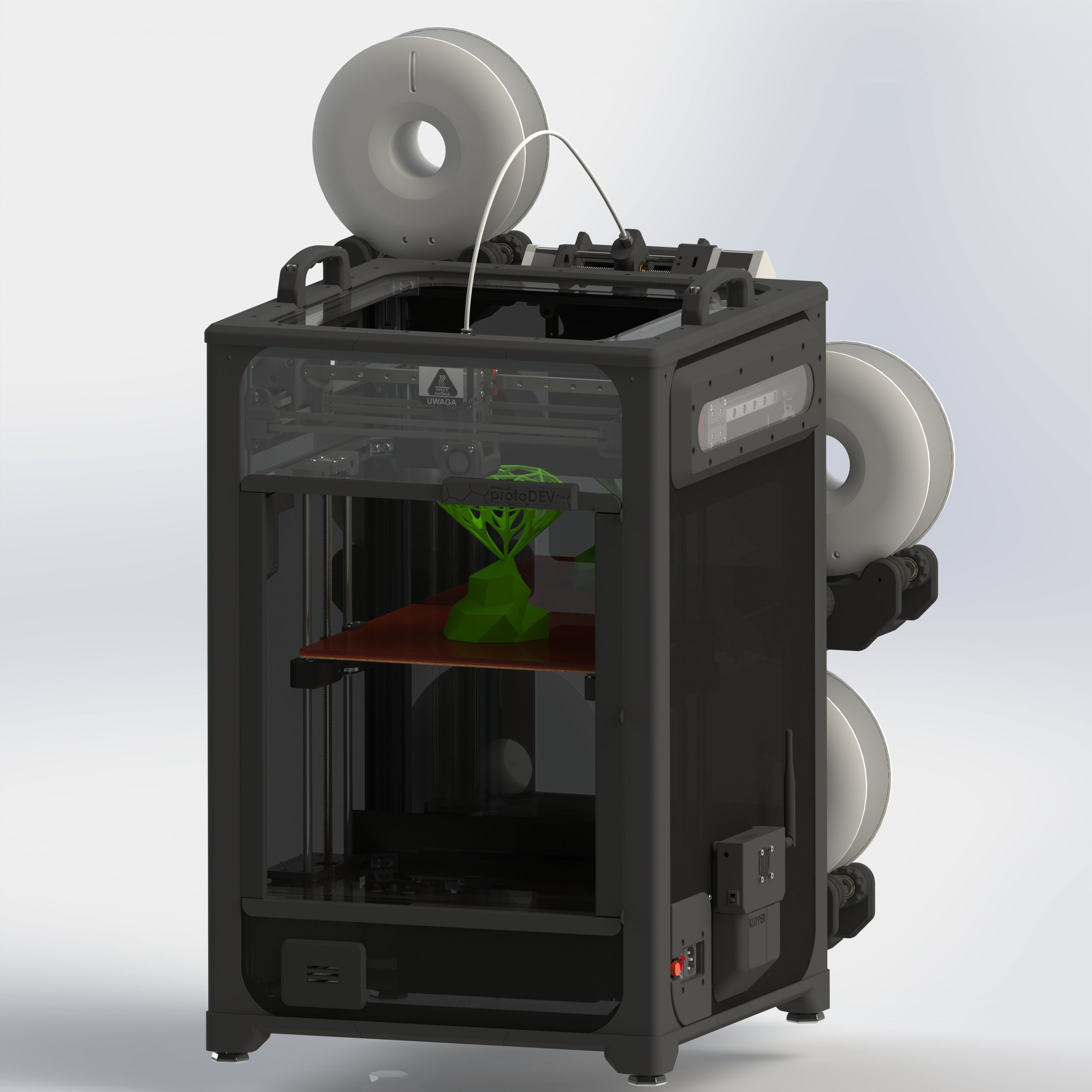
描述:diy直驱式挤出机3D打印机运行Klipper固件
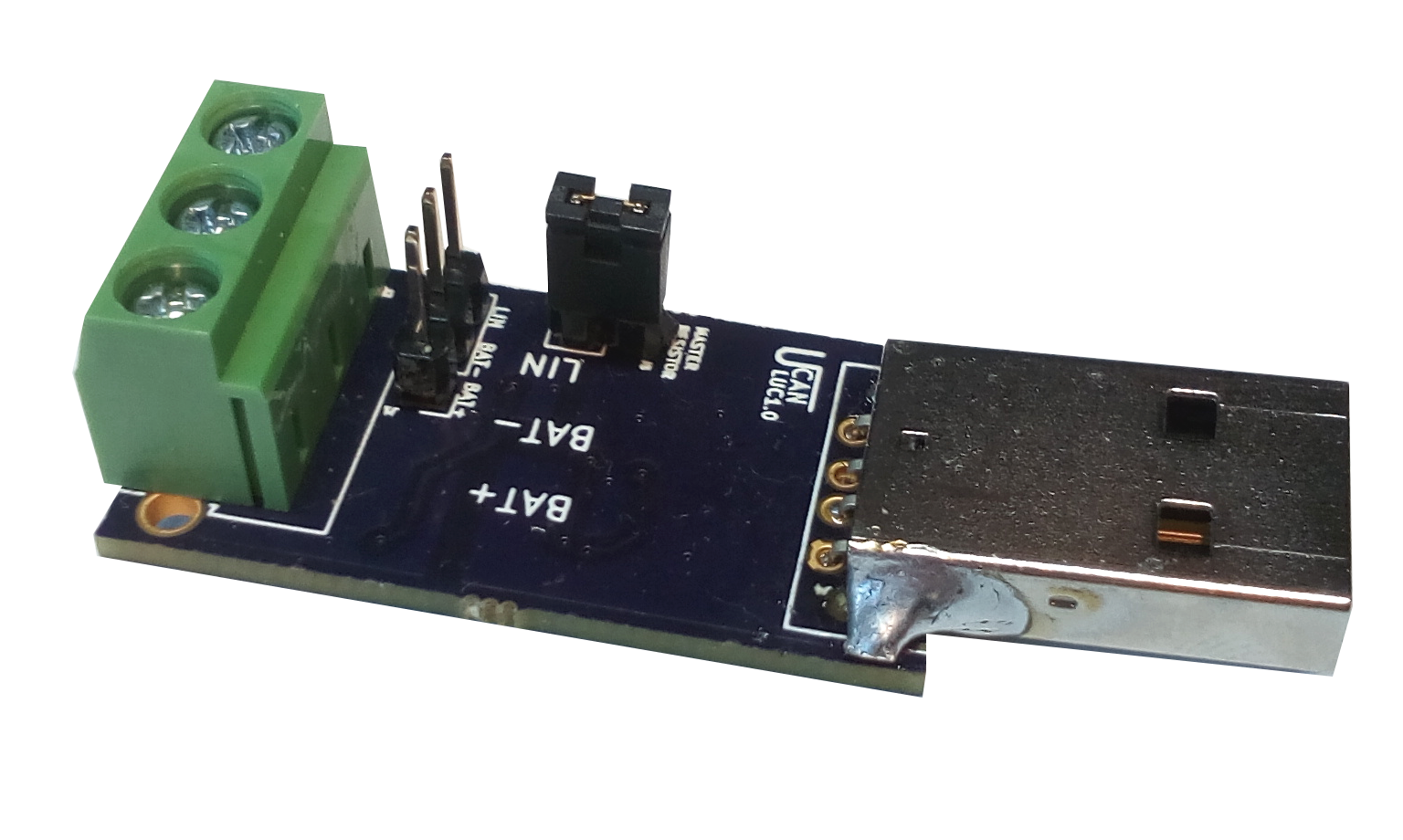
描述:项目旨在为ROS开发廉价和LIN(本地互连网络)投诉设备的系统。
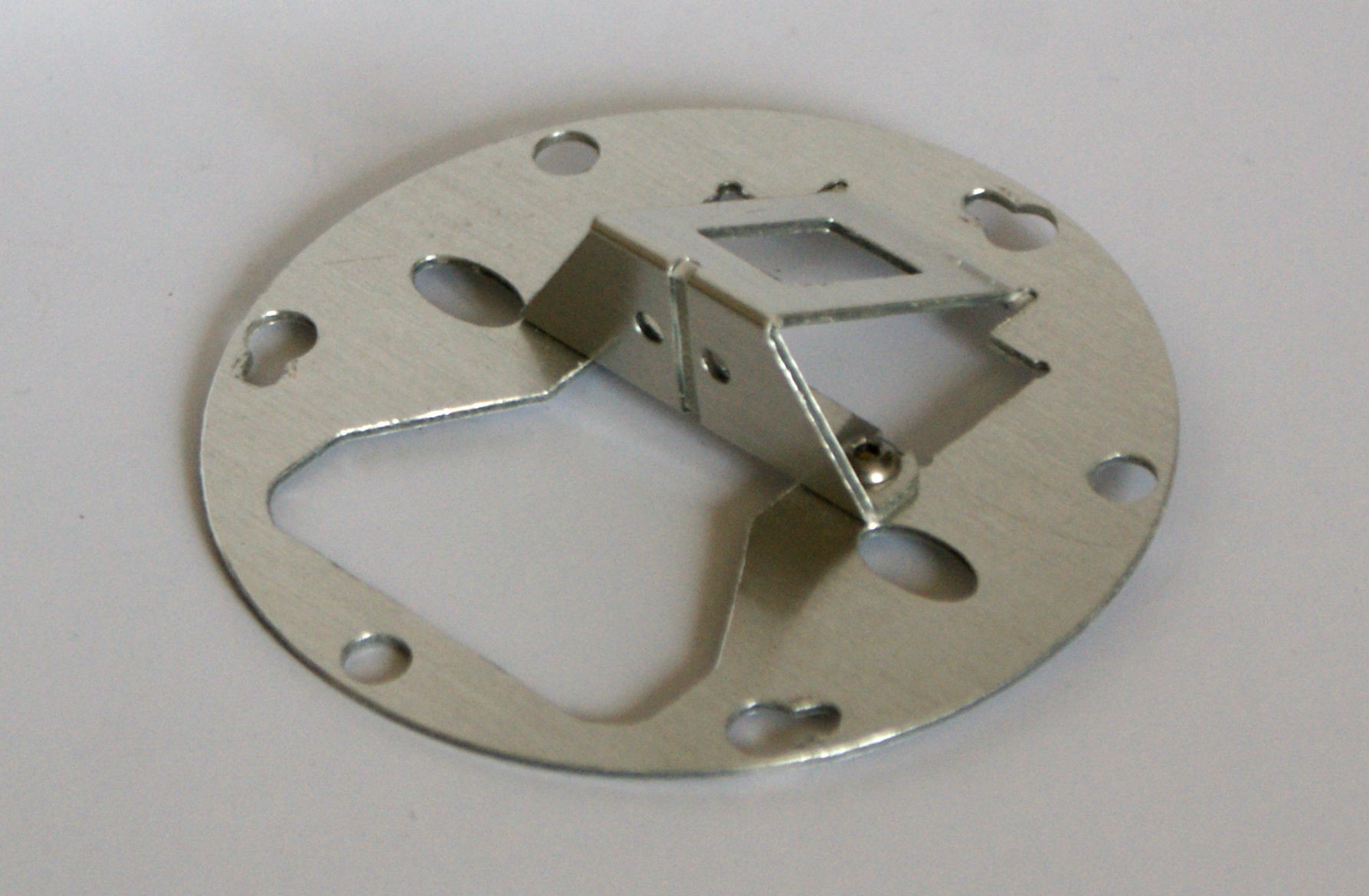
描述:通过CNC雕刻一块特殊的薄复合材料(1,2mm),Hylite,其面板为铝合金,制作带有活动铰链和各种机械结构的铰接机构。和聚丙烯(PP)中的核心。
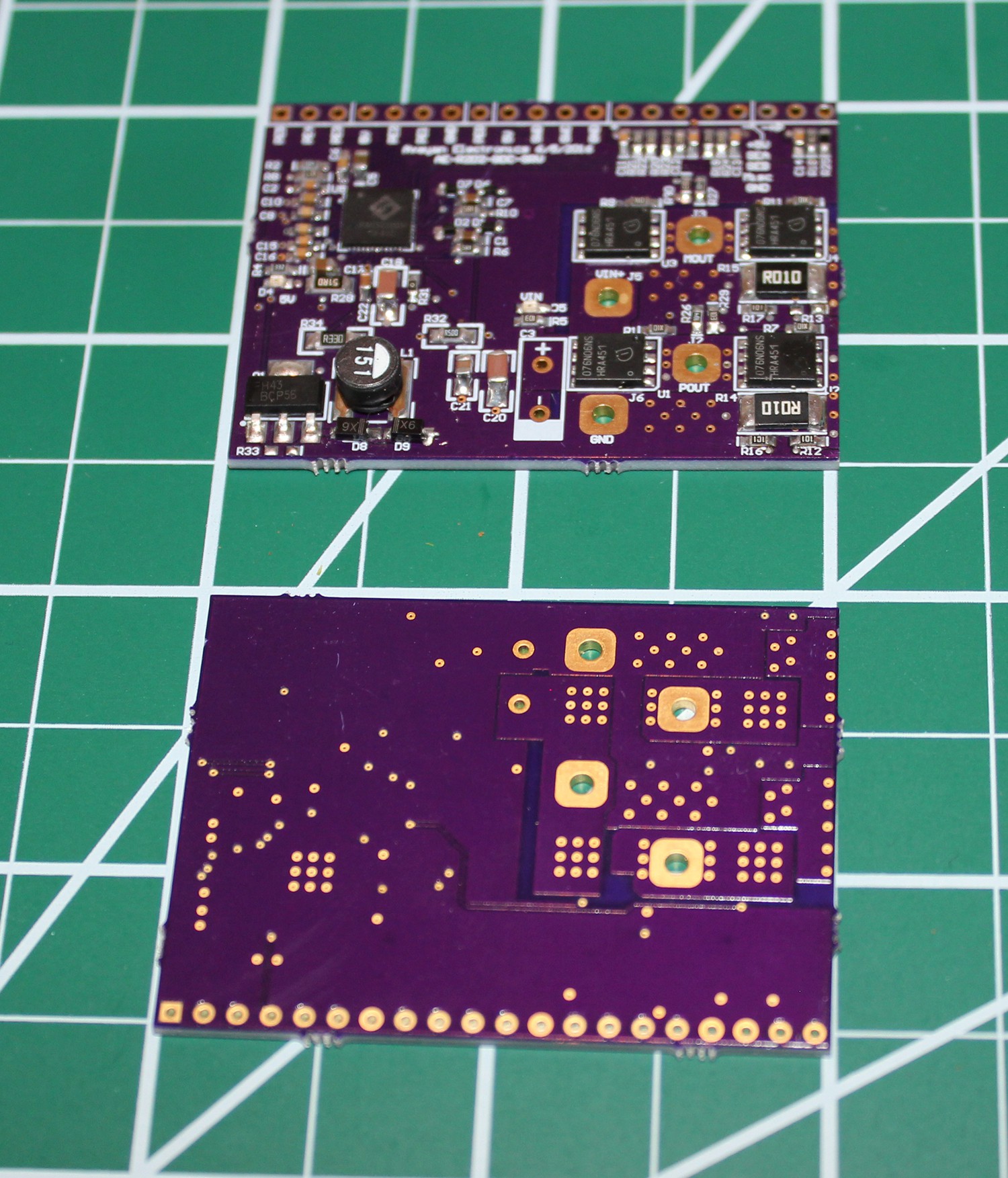
描述:Power PACks是三相BLDC或PMSM电机驱动器,基于功能强大的PAC52xx ASIC,集成了大多数通过大多数典型换向算法轻松驱动跳闸相位电机所需的电路。已经实施了不同的电源PAC,以驱动在8V和600V总线电压之间运行的电机应用。通过确定外部FET的尺寸,可以实现极高的电流。功率输出范围从低功率到超过1千瓦,高额定功率是常态。
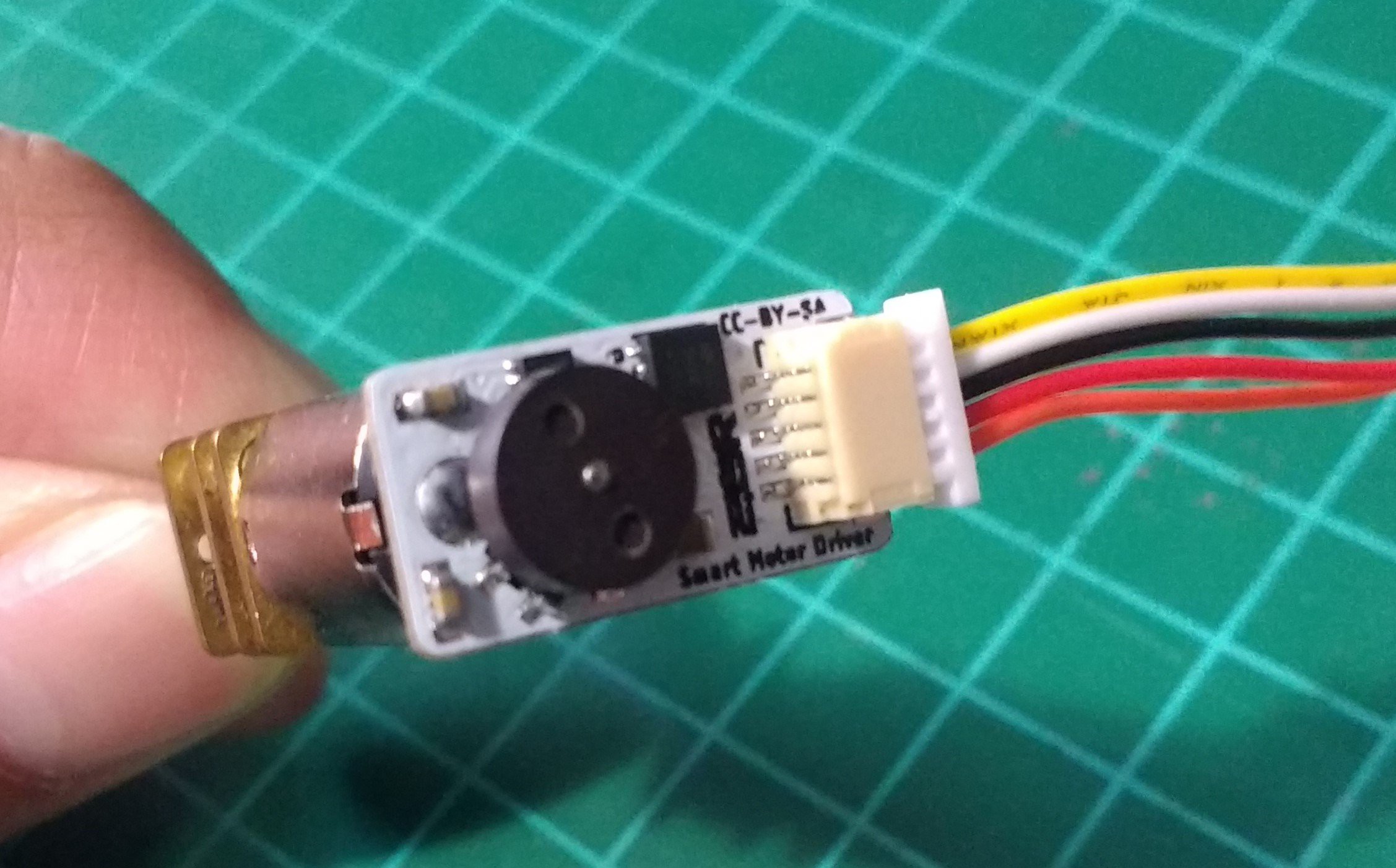
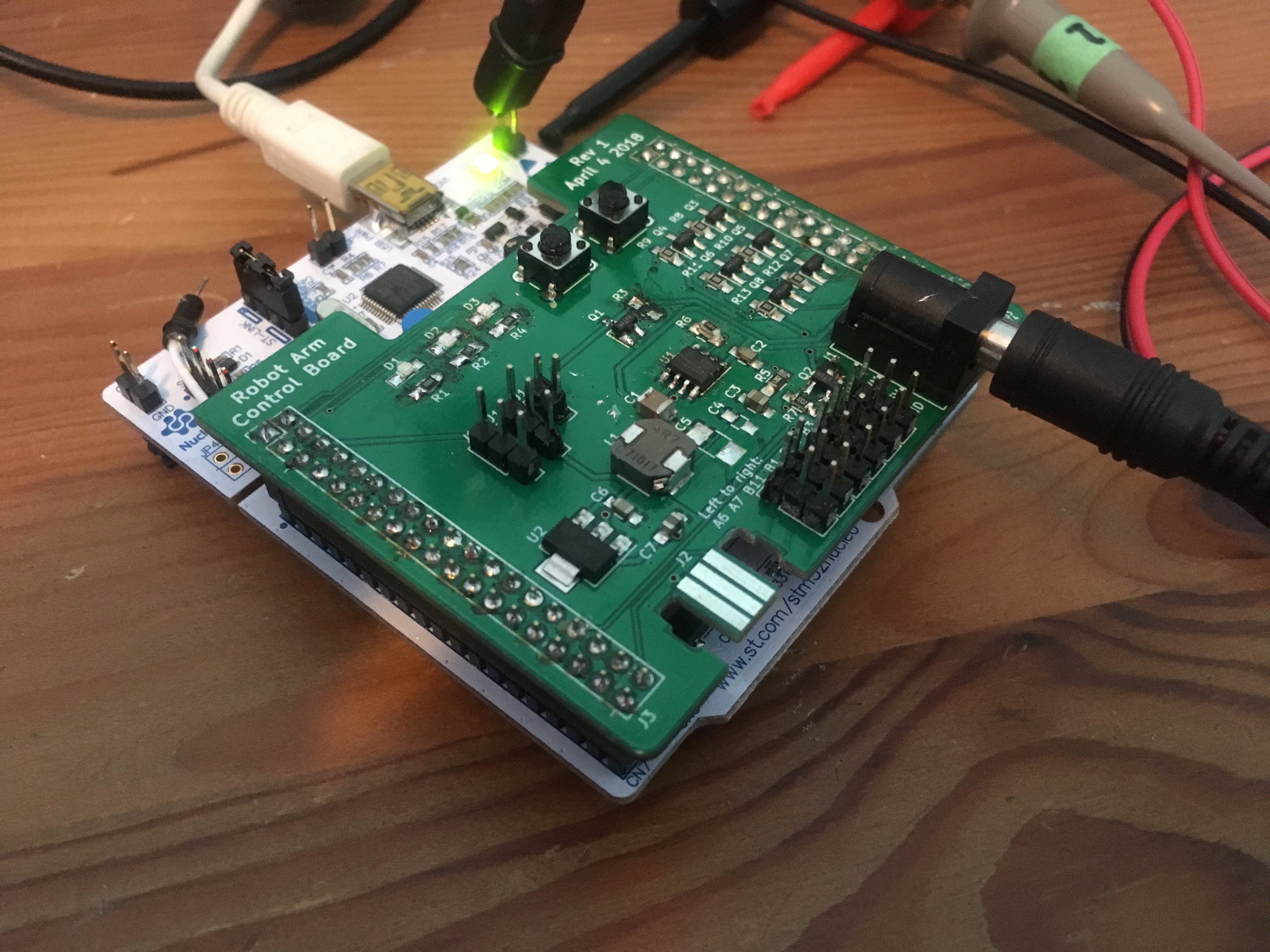
描述:这是一款智能电机驱动器(又称SAMI),设计用于运行微型减速电机,该电路板的目标是通过相应的RPM反馈对该电机实施PID控制。
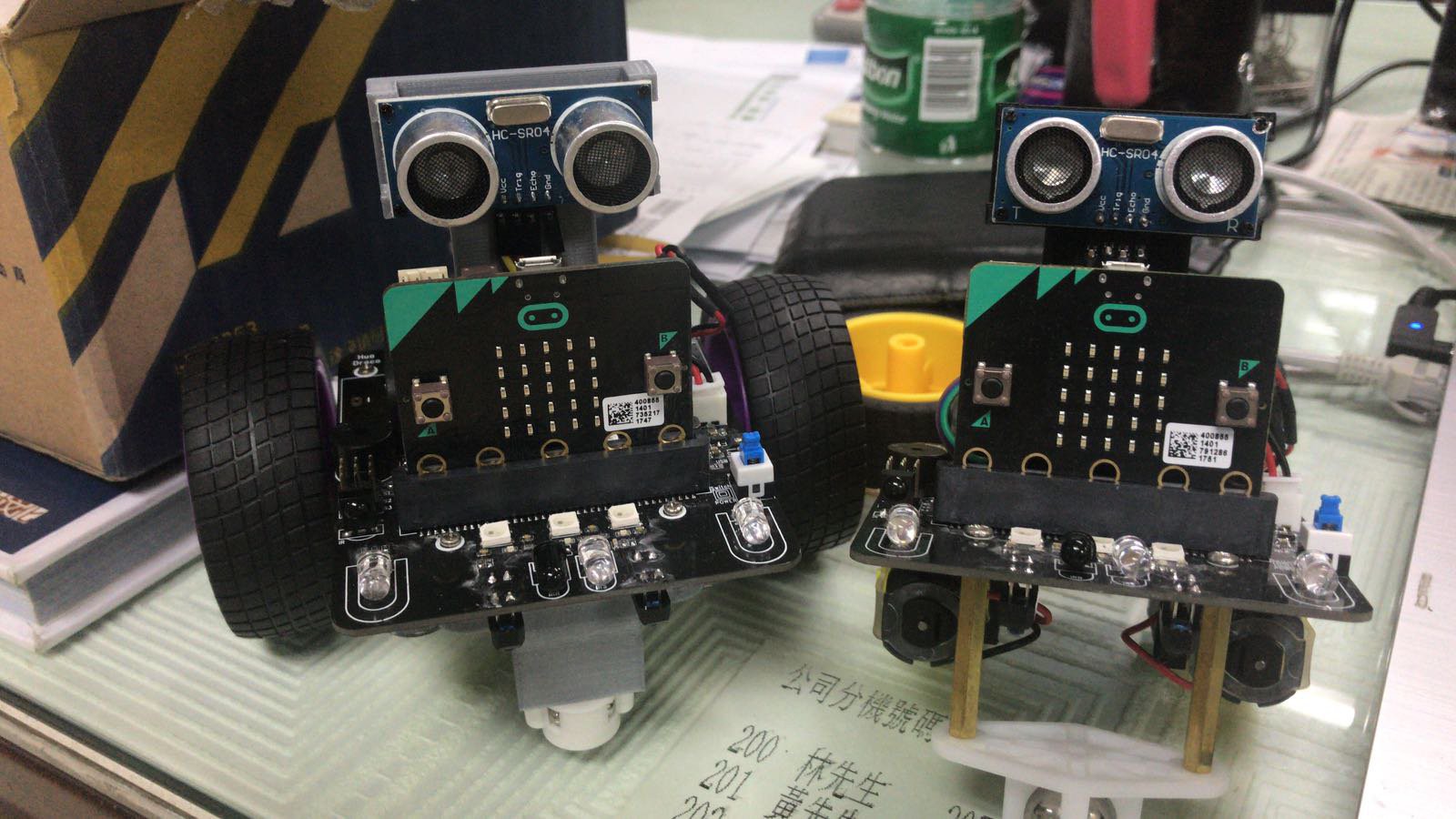
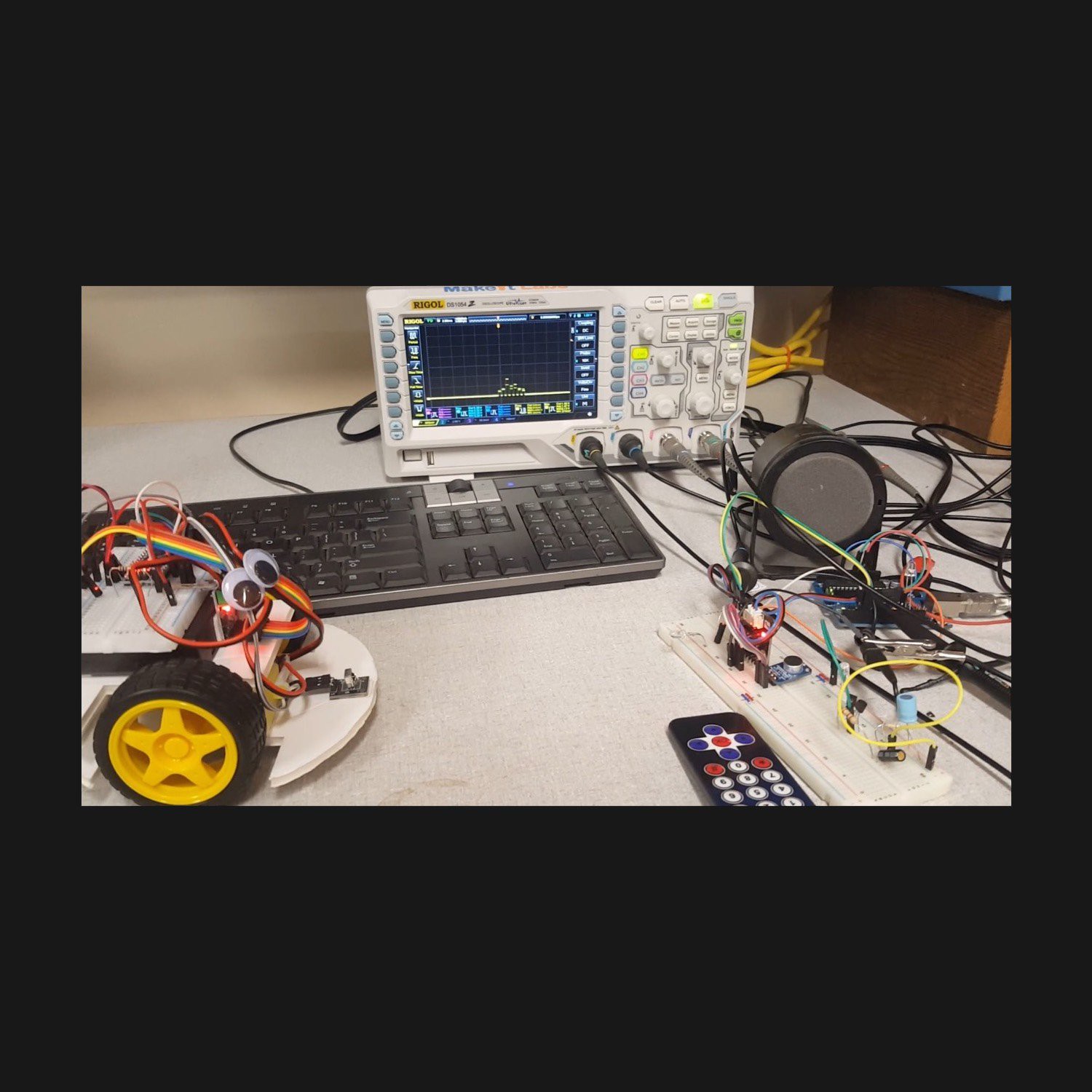
描述:包含所有必要的电路,传感器,用于BBC微型机器人教育的电机
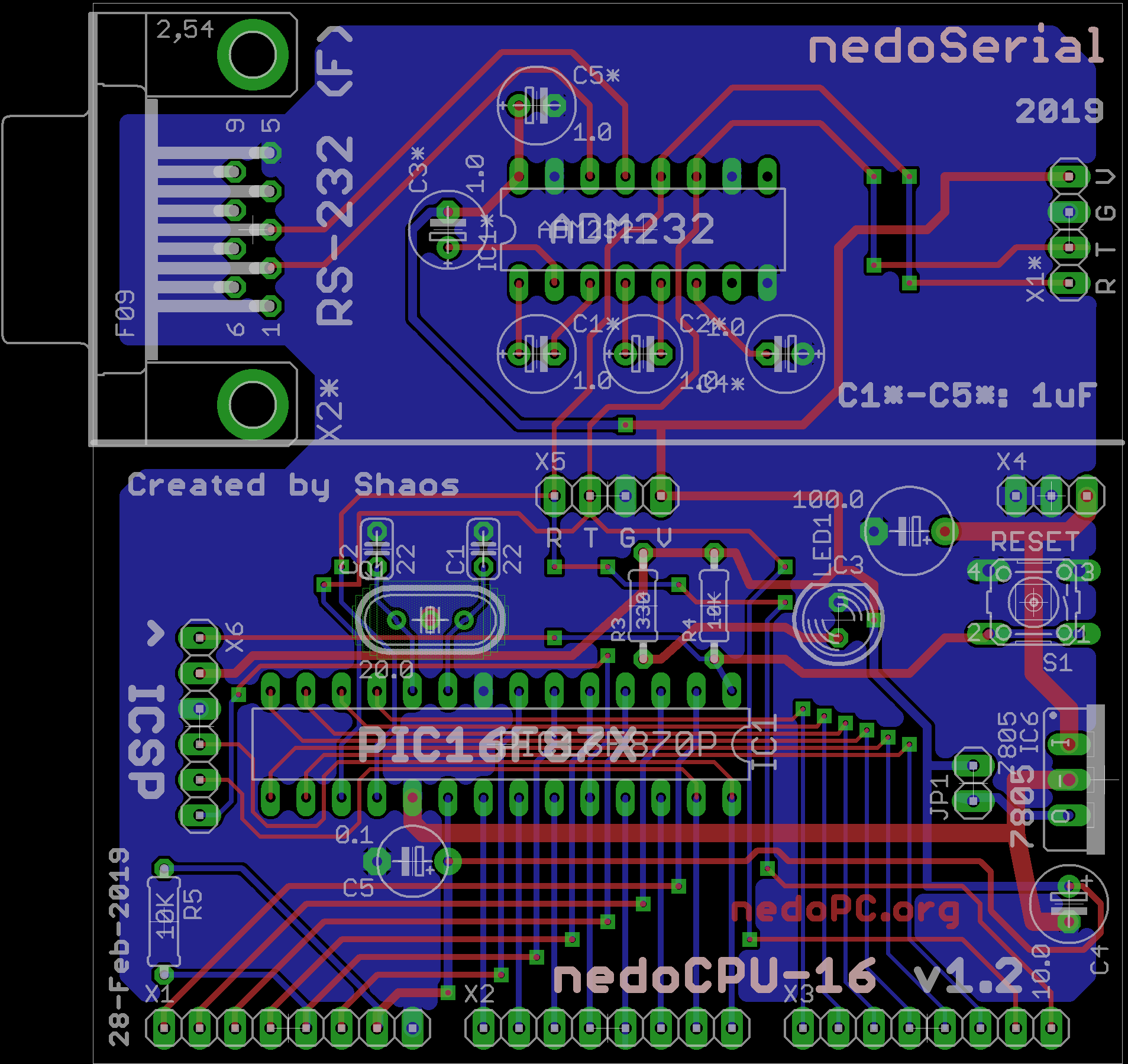
描述:可用作机器人的大脑或nedoPC的CPU -16系列DIY电脑

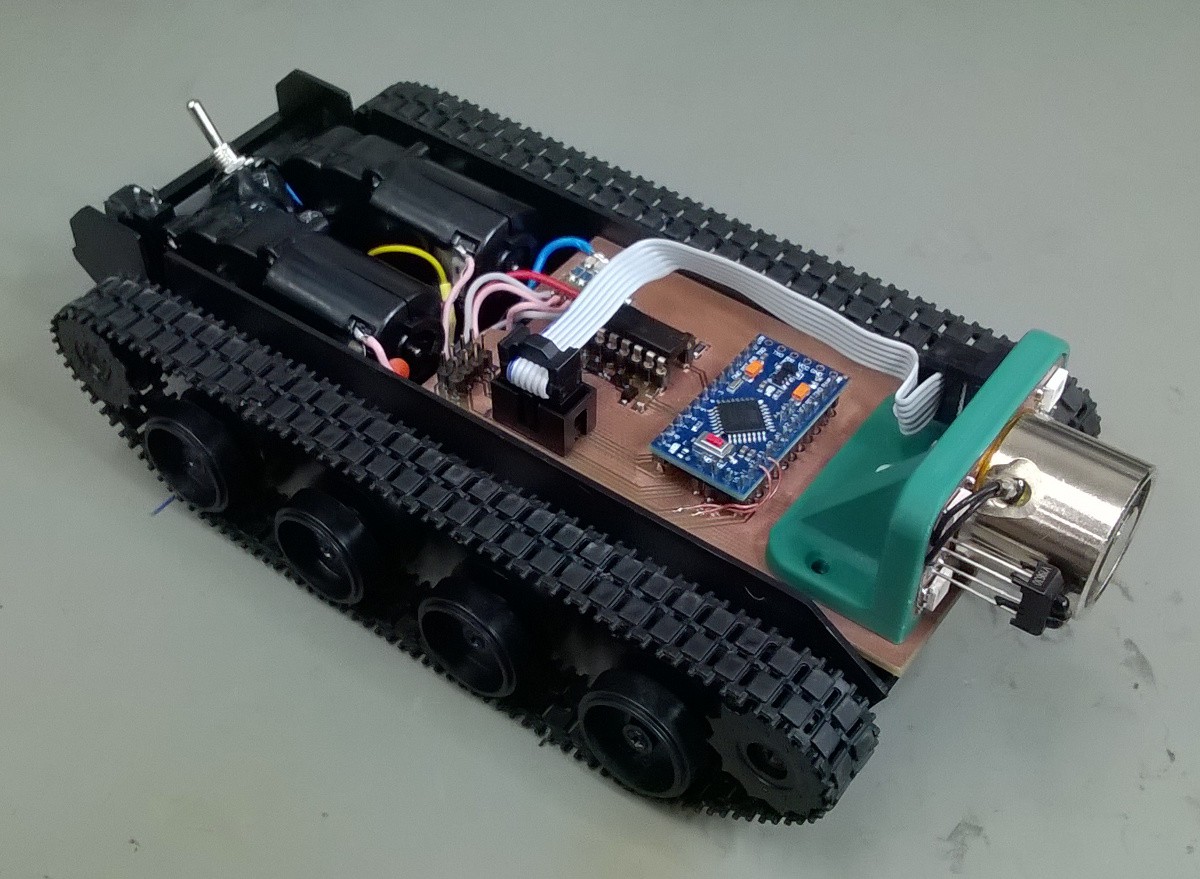
描述:一种低成本,可扩展的机器人,由改变用途的消费产品和现代软件工具构建而成。

描述:该项目有三个基本部分。首先是构建物理发射器本身。这是该项目的黑客/制造者的一部分,可以通过很多方式实现它是愚蠢的。您可以购买万向节和激光切割外壳以固定零件,或将胶带粘贴到纸板箱中。你可以拆开一个旧的Playstation控制器并将新的电子设备塞进里面,或者只是将拇指杆固定并放入塑料三明治容器中(如果你愿意,可以使用胶带)。或者从旧货店购买一台旧的R / C发射器,或从业余爱好商店购买一台旧的R / C发射器,并将其用作项目的基础并调整其内部结构以适应新的电子设备。

描述:该电机的线圈由5 / 5mil无芯pcb绕组制成。带有磁铁的3D打印钻机用于滑过PCB,并由绕组的磁场驱动。
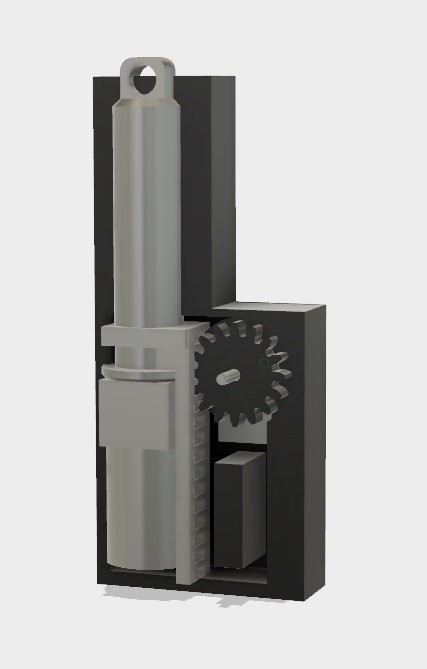
描述:制作类似于Firgelli微型执行器的东西,但是你自己也可以将附加的执行器与机器人或项目的主体结合起来。

描述:Dexter是一款开源机器人手臂,主要由3D打印机制成。它使用5个NEMA-17步进电机来控制其5个轴以及其中3个的谐波驱动。我们在每个轴上放置了正交光学编码器,因为步进电机没有编码器,如果不够强,它们有时会跳过。使用这些编码器,Dexter上的FPGA微控制器可以足够快地轮询传感器并实时校正电机的位置。由于我们的软件,我们可以每秒轮询每个轴500万次,创建一个200纳秒的反馈回路。

描述:m-BITBEAM是一款基于Bitbeam概念的3D打印结构,包括一些附加部件,如轮子,支架,盒子等。可编程控制单元基于Arduino及其各种模块和传感器的大型生态系统。
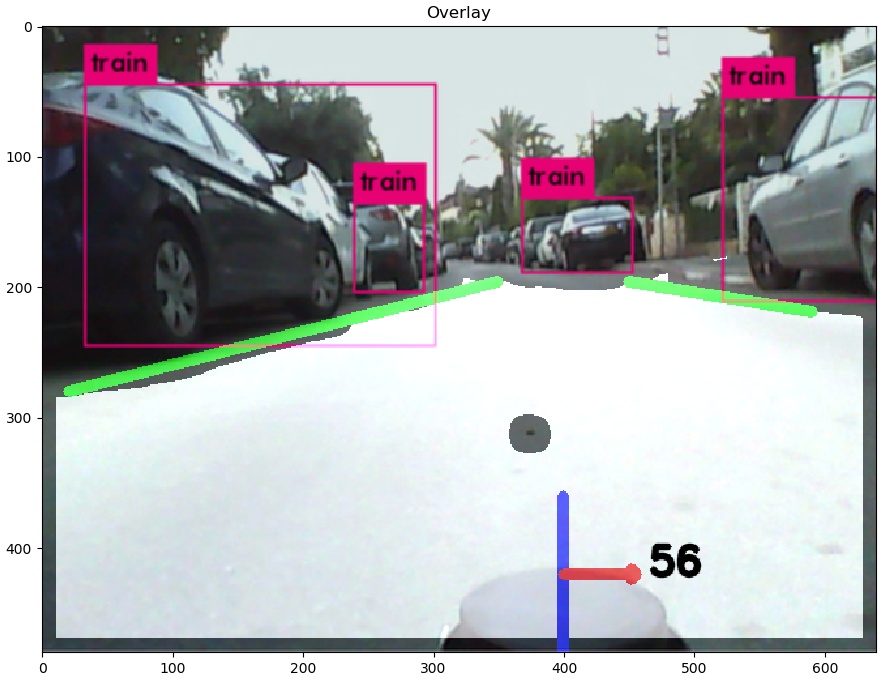
描述:项目目标是实现定位,车道跟踪,转向等算法,并创建一个微型硝基自动驾驶汽车。

描述 :在这种情况下,听到颜色意味着听取预设音调的音量水平而不是听到扫描仪说出的单词。ColorChord是一种模拟和数字设备,任何人都可以使用基本组件轻松复制,并且旨在供视障人士使用,即完全失明或一系列色盲。
描述:MARB将保护您的家庭,在您的日常生活中为您提供支持并成为您的同伴。该项目的目标是为每个家庭提供机器人计算。
描述:它完全可以3D打印,无需柔性灯丝或支撑结构。
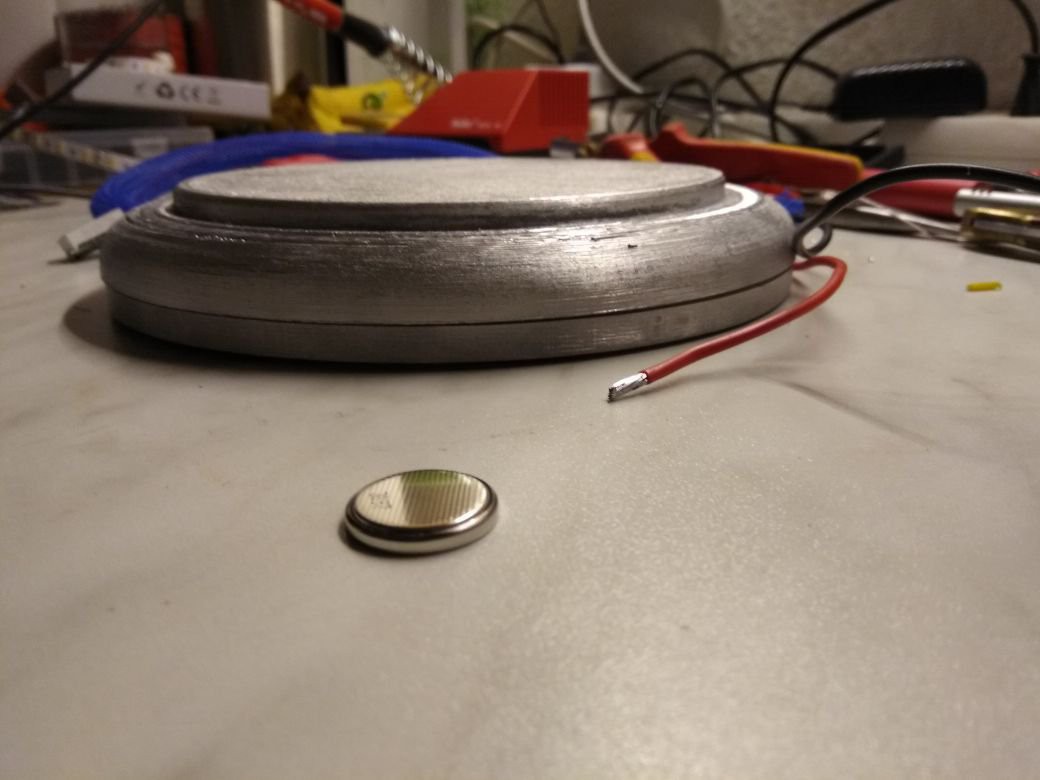
描述:一个小型纽扣电池
描述:提供电源,PWM电压电平转换和Wii Nunchuck连接器。设计用于EEZYbotARM MK2。
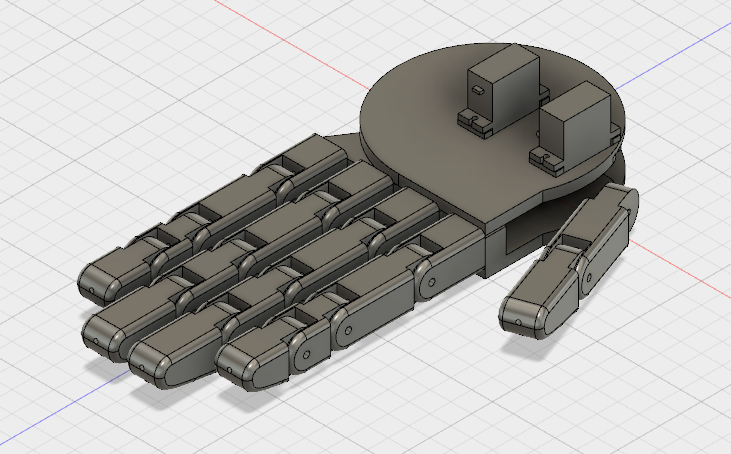
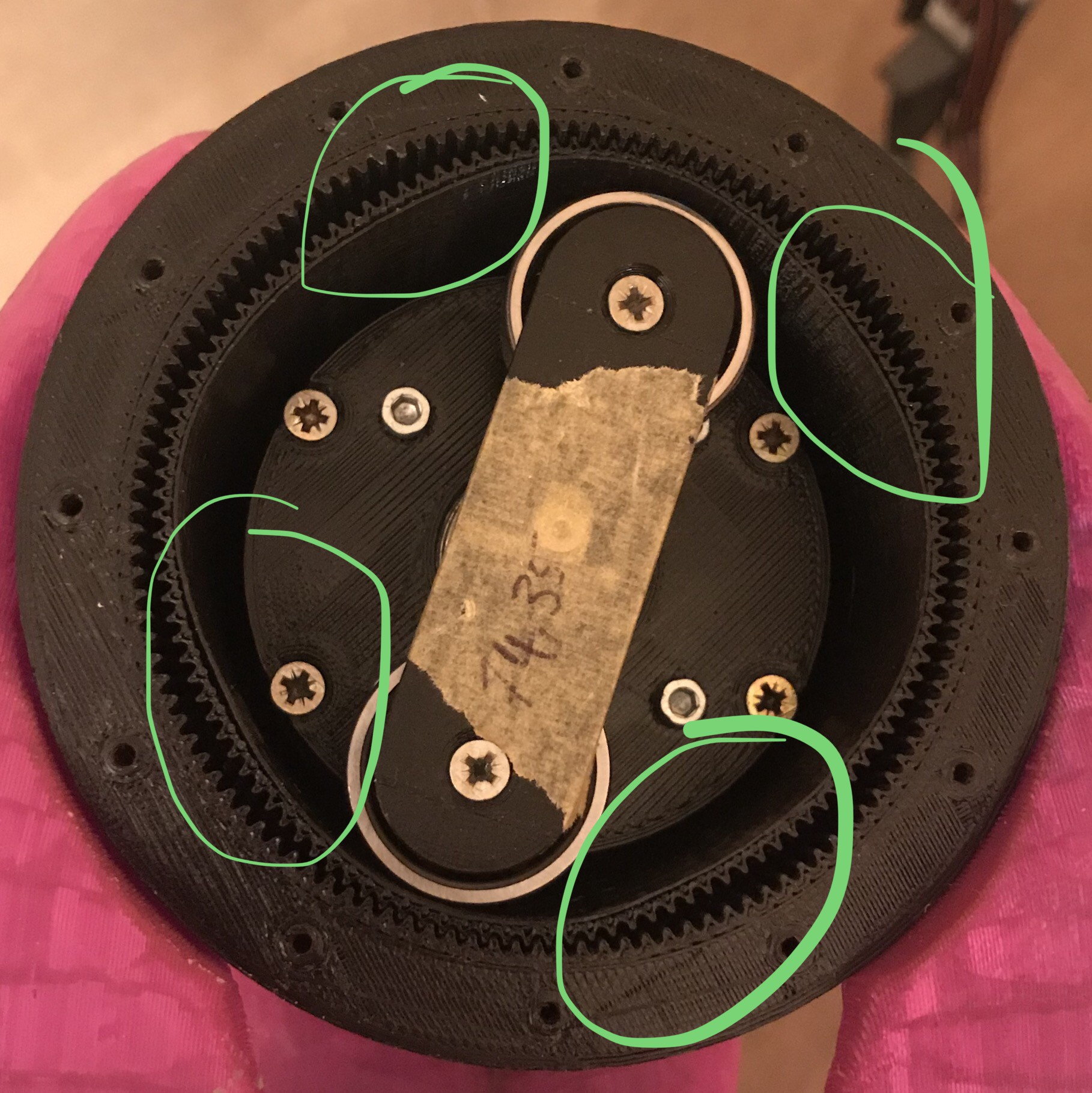
描述:该项目(RHIG)旨在通过设计具有某些手指的仿生抓手来提高抓手的强度和灵活性,所述手指可以定位在圆形轴上而不会丧失移动手指的能力。这是通过使用两个额外的伺服器来旋转五个手指中的三个,具有两个旋转点来实现的。因此,当需要额外的握力时,环和小指可以旋转180度,以便将手转变为双指夹持器。或者所有三个手指都可以旋转以创建三指夹持器。通过这种设计,抓手可以根据手头的工作进行调整 - 而不必使用复杂的动作或将一个属性妥协为另一个属性 - 为机器人提供额外的灵活性和灵活性。
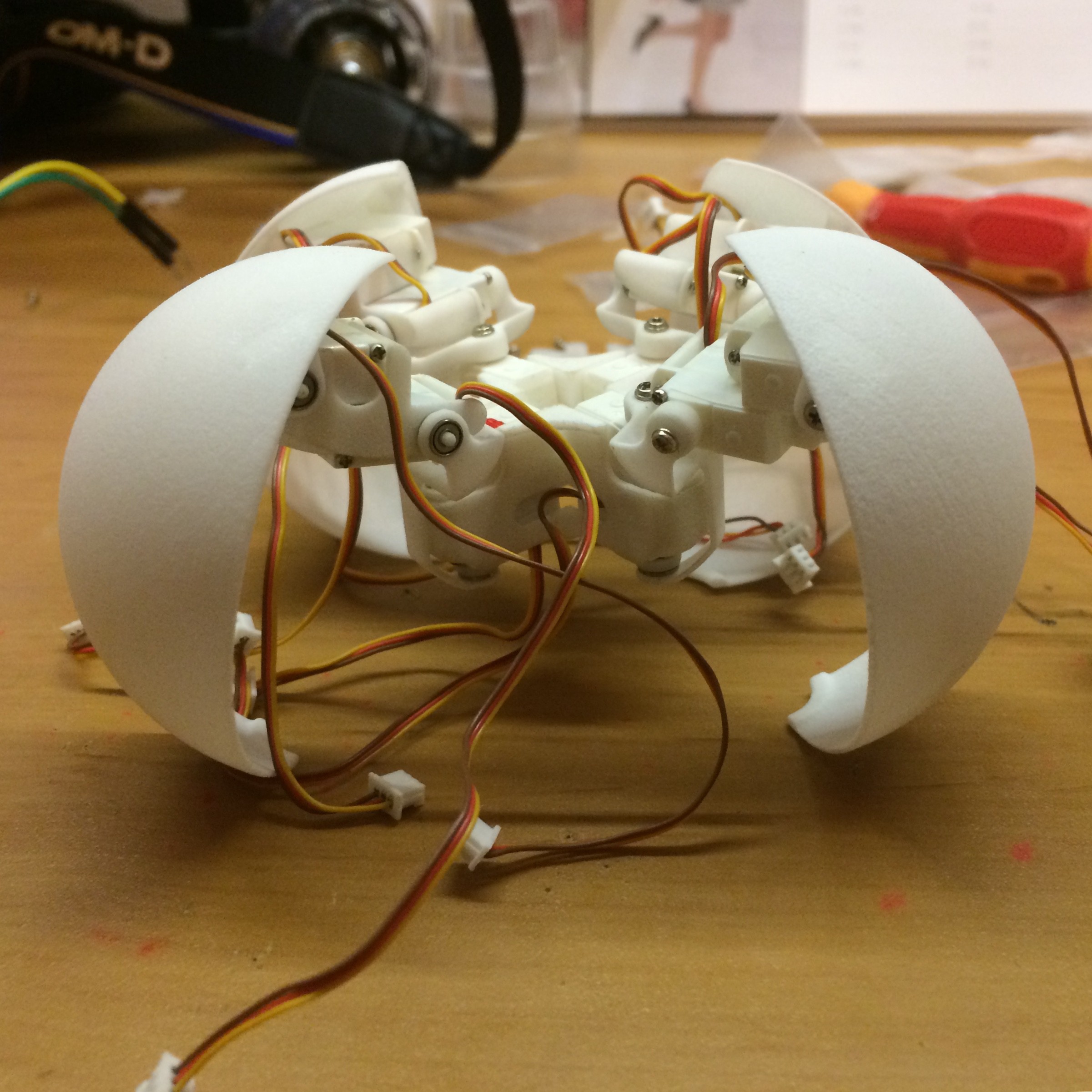
描述:棒球大小的四足机器人

描述:Gutters To Gardens是一个使用(IoT)物联网远程激活家庭花园床配水系统的系统。该项目是完全开源的,旨在通过在家开始解决气候变化和粮食不安全的世界范围问题:使普通公民更容易获得园艺,减少耗时。

描述:模型和3D打印模具,创建硅橡胶“皮肤”格子,以便轻松制作与您的3D扫描相匹配的定制假手
描述:在这个项目中,为机器人开发定位系统。

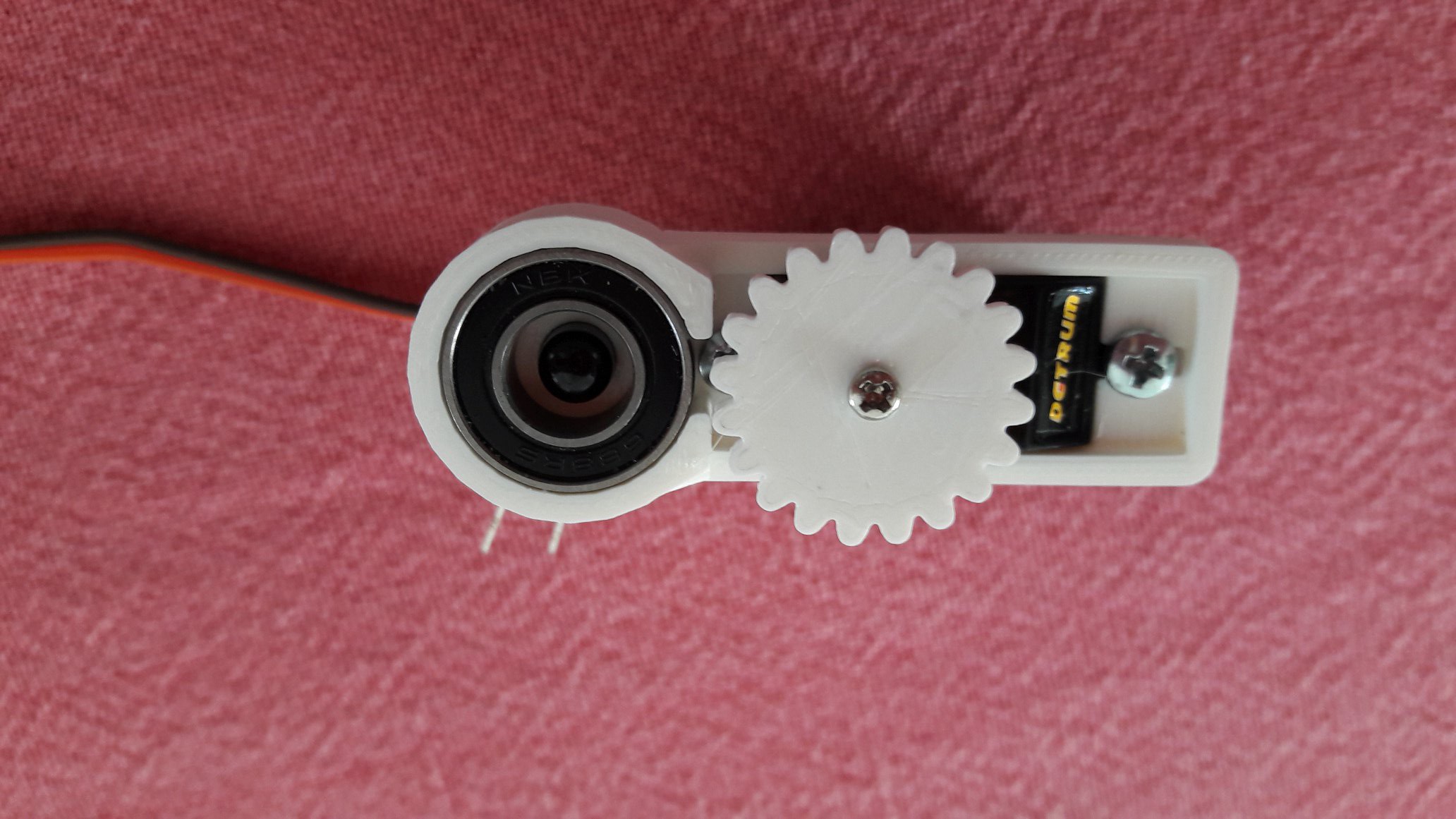
描述:高速高扭矩机器人执行器,采用低成本无刷电机,定制控制器,3D打印部件和轴承。
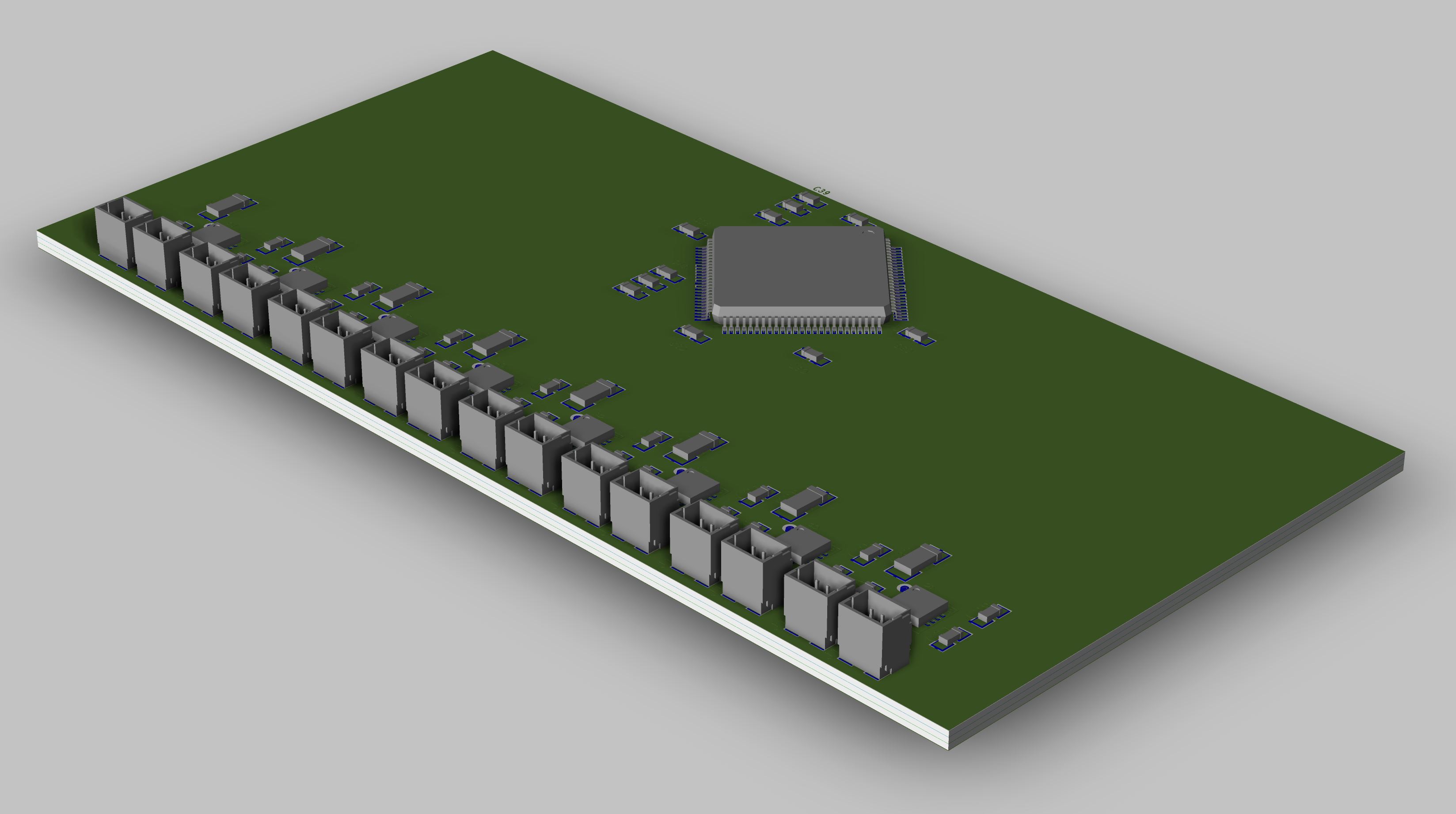
描述:低成本,可堆叠,自动拾取和放置零件进给器,支持最大24毫米的磁带
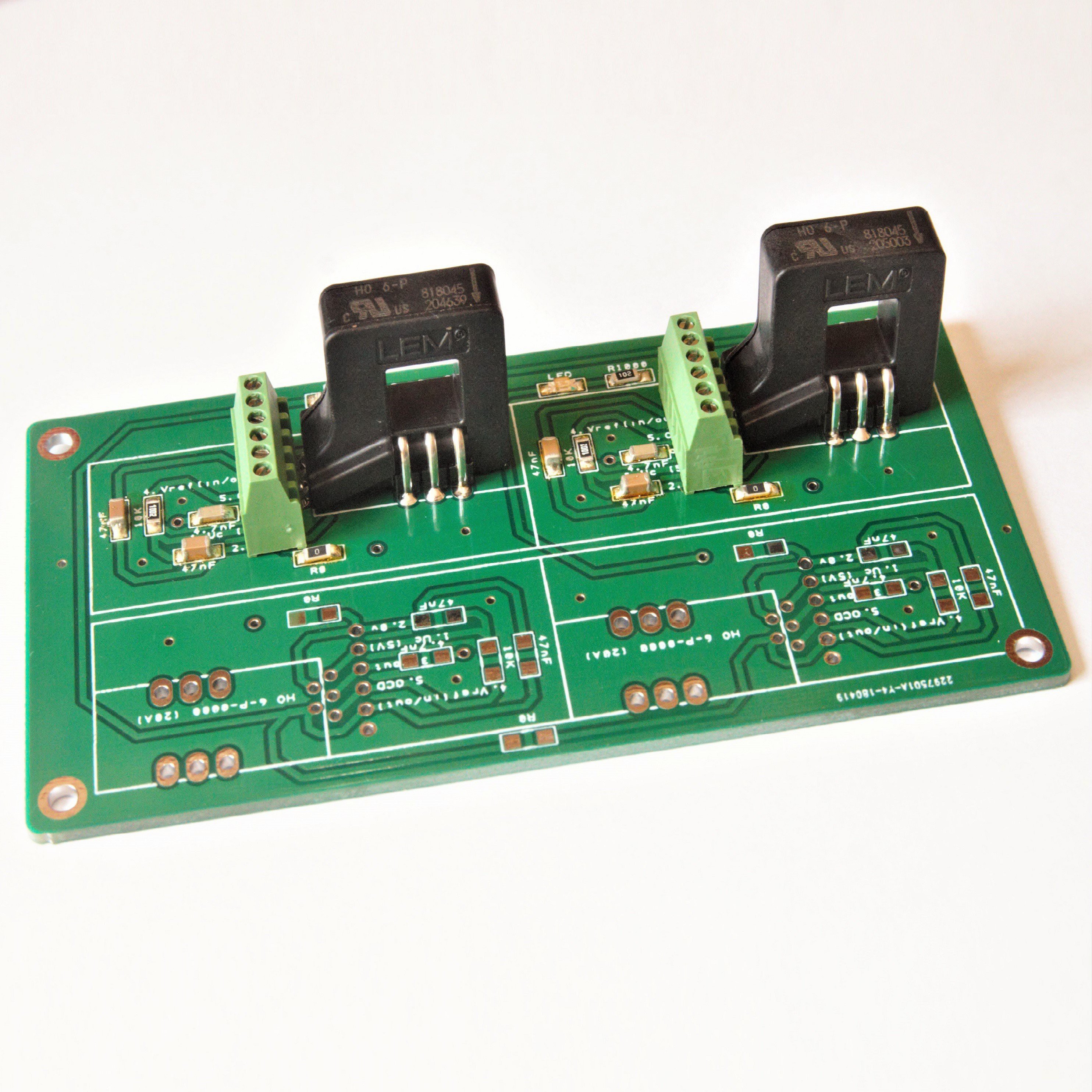
描述:该项目使用LEM HO 6-P-0000开环电流传感器,-20→20A,19→25mA输出电流
描述:收集器旨在收集环境中的不同类型的数据。它由四台Raspberry Pi计算机构建,每台计算机都被指定为不同的任务。所有这些都将包含在机器人底盘中。你可以用任何Pi代替每个角色。收集的数据包括GPS跟踪,天气条件和运动检测。

描述:使用Acconeer AB的A111 60 GHz脉冲相干雷达传感器,该模块可以毫米精度感应最远2米的距离。与激光雷达传感器不同,它不受灰尘,颜色或环境或直接光源的影响,即使使用镜头(几乎是镜头),也不会造成眼睛安全风险。

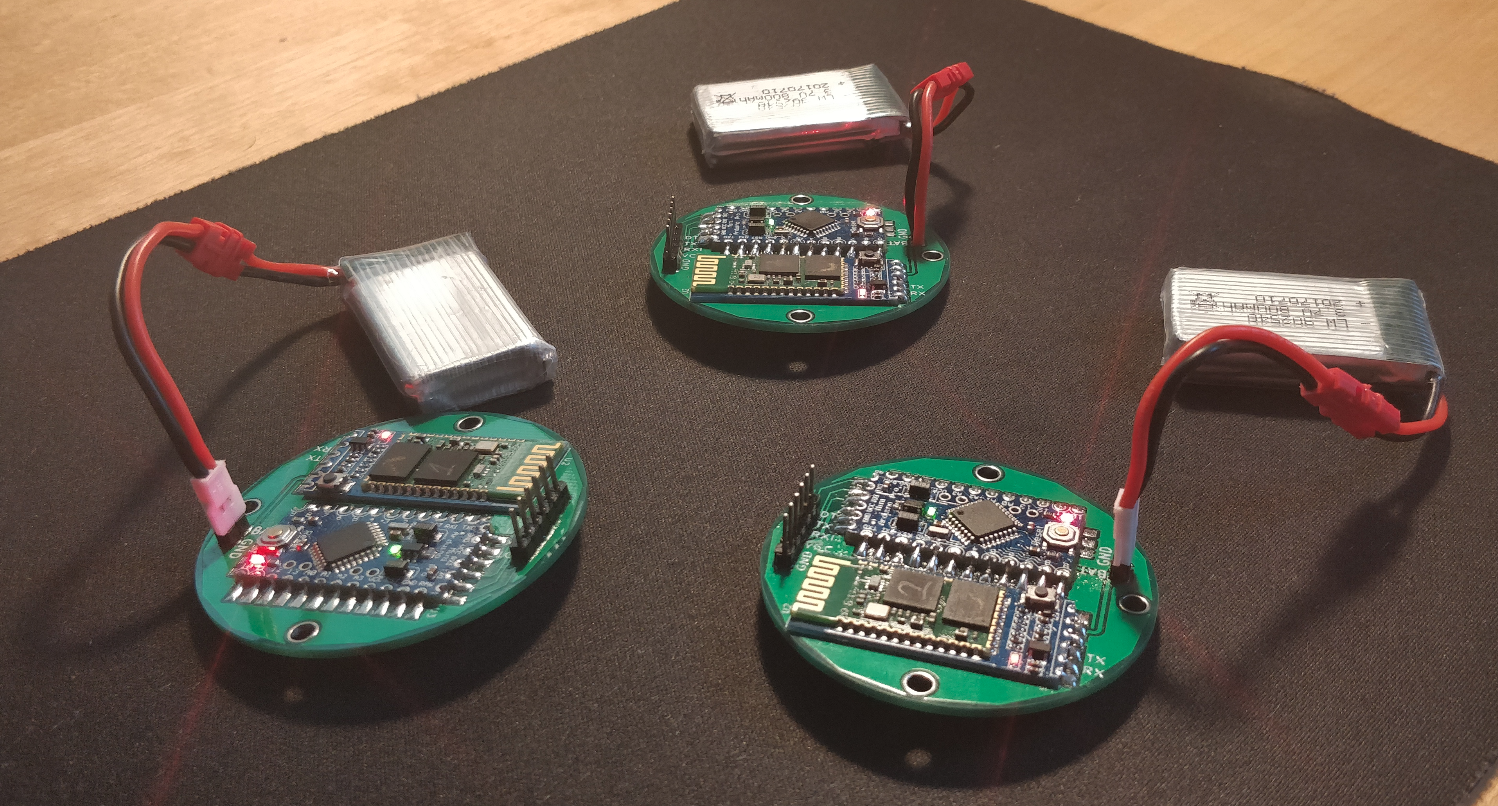
描述:Glide项目的目标是创建一个强大,低成本的模块,允许用户在几个小时内动员他们的项目,以及创建一个像我这样的学生可以贡献和学习东西的开源项目从。

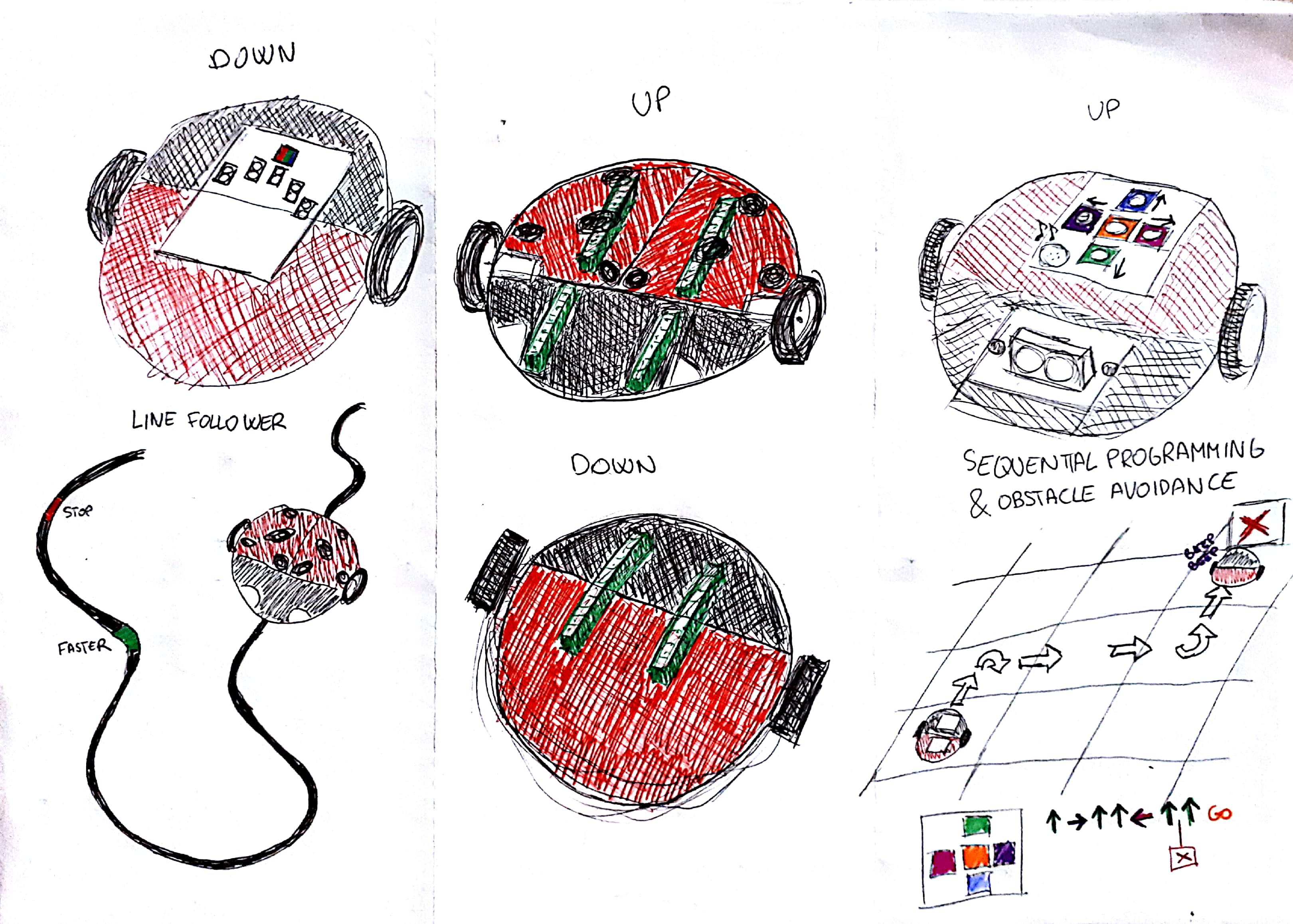
描述:一个通用的硬件,软件和3D打印模块,使任何人都可以打印和编程的有趣,教育机器人。

描述:用于机器人的通用3D打印夹具

描述:RoboAmbler是简单的开源步进四足机器人,具有5杆连杆。杠杆臂通过伺服器旋转。我们计算了anlges的功能,以使RoboAmbler踩踏和行走。我们可以改变基座的垂直位置和角度。

描述:OpenAI健身房是一个非常酷且易于使用的环境,用于尝试强化学习算法。推杆是一个典型的控制理论问题,您可以在直线导轨上驾驶推车来平衡连接在其上的自由旋转的杆。该项目是推车杆的硬件实现,带有3D可打印部件,可用于铝挤压轨道。

描述:LIL TTS BOT模块可用于制作具有文本到语音功能和网络控制功能的小型移动机器人。该模块附带一个python软件,安装在任何平板电脑(Windows或Android)上,将其变成机器人的脸(GUI)。然后将平板电脑与模块串联连接。

描述:工厂 - 机器人混合动力与执行器和电位传感的工厂控制
描述:TUMER的主要特点是减少了部件数量,无需螺丝就可以安装,也无需焊接任何部件,它不需要胶水或类似材料,而且构造起来非常便宜。TUMER的另一个要点是模块化设计。您可以安装不同的传感器,执行器或无线通信屏蔽或设计您自己的部件。
描述:让机器人跳舞。
描述:基于IMU的编码器。IMcoders以最小的集成工作量为机器人提供测距数据,简化了几乎任何系统的原型设计。
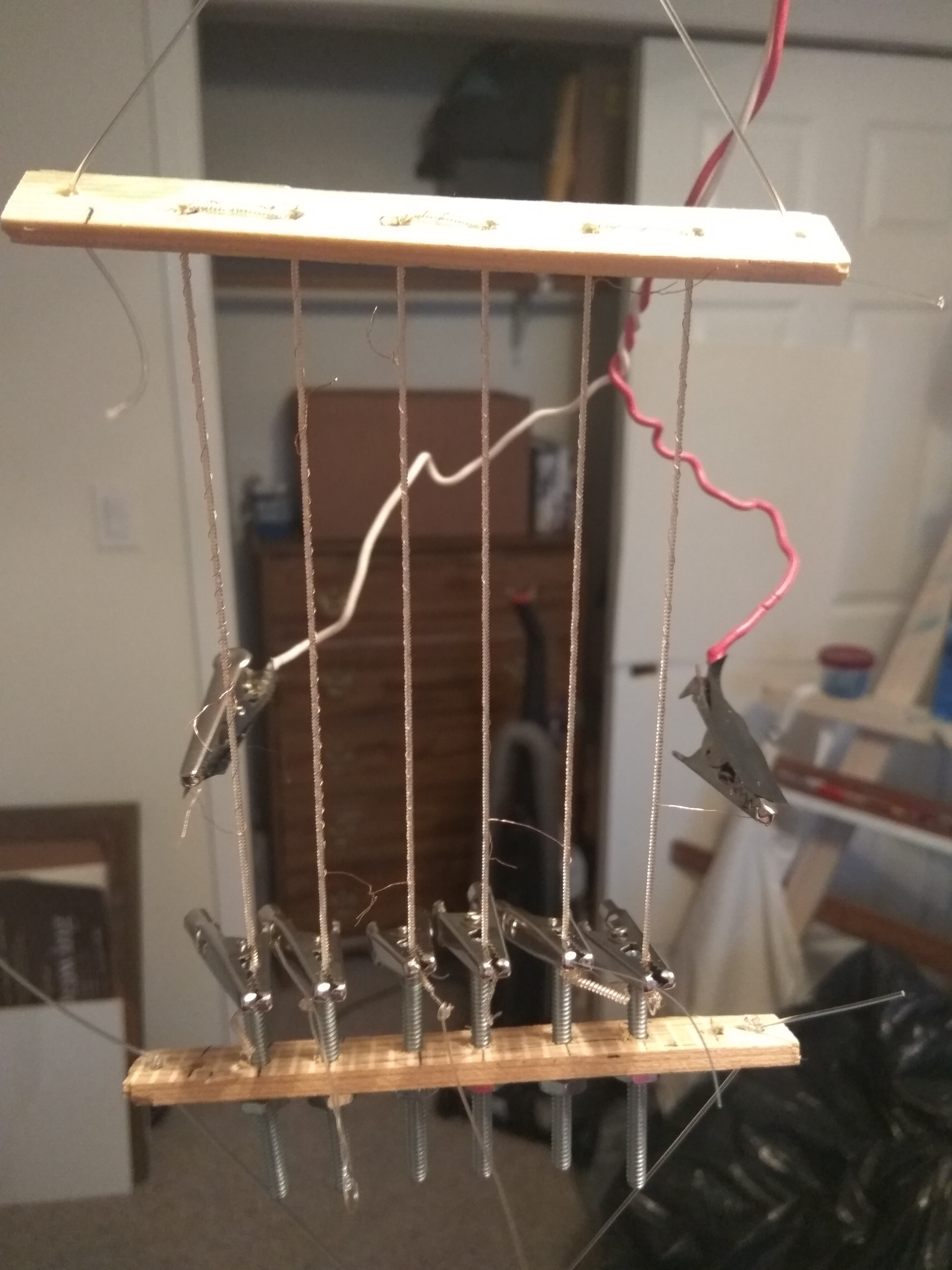
描述:当钓鱼线被包裹在镍铬合金线中时,然后超级旋转直到它类似于弹簧并且退火它具有一些热敏感行为。当电流通过它时,镍铬合金升温,导致肌肉收缩达30%。
描述:这是一个带有传感器和电池的假手的DIY插座,可以适应各种功能。该项目的设计理念是由于市场上的高价假肢以及3D打印和开源的增加。

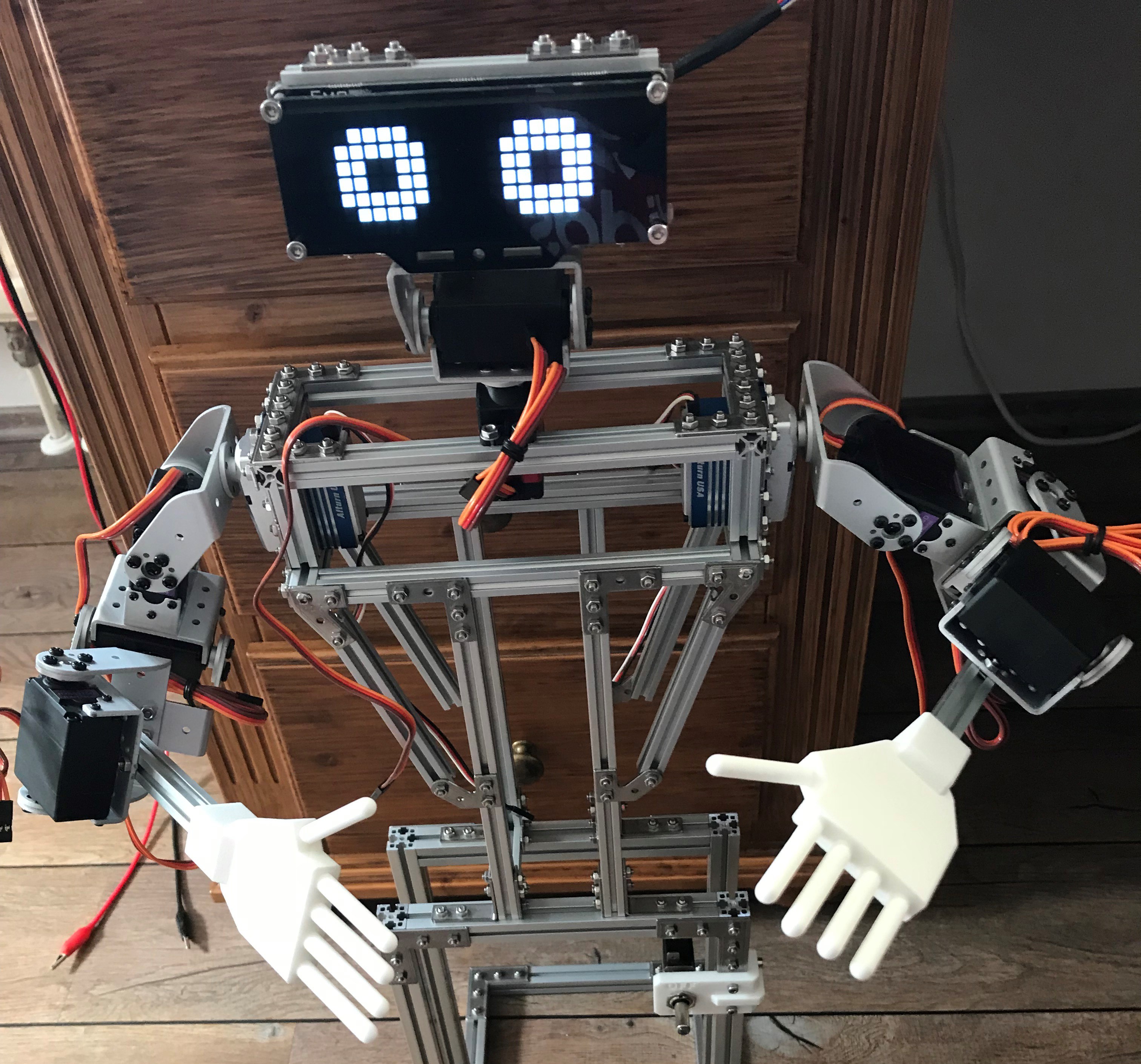
描述:Volt是我们的移动机器人测试床 - 他作为伴侣机器人,娱乐机器人,以及Ray在他的机器人技能方面的进步,他通过增加伏特的设计来测试他的新知识。
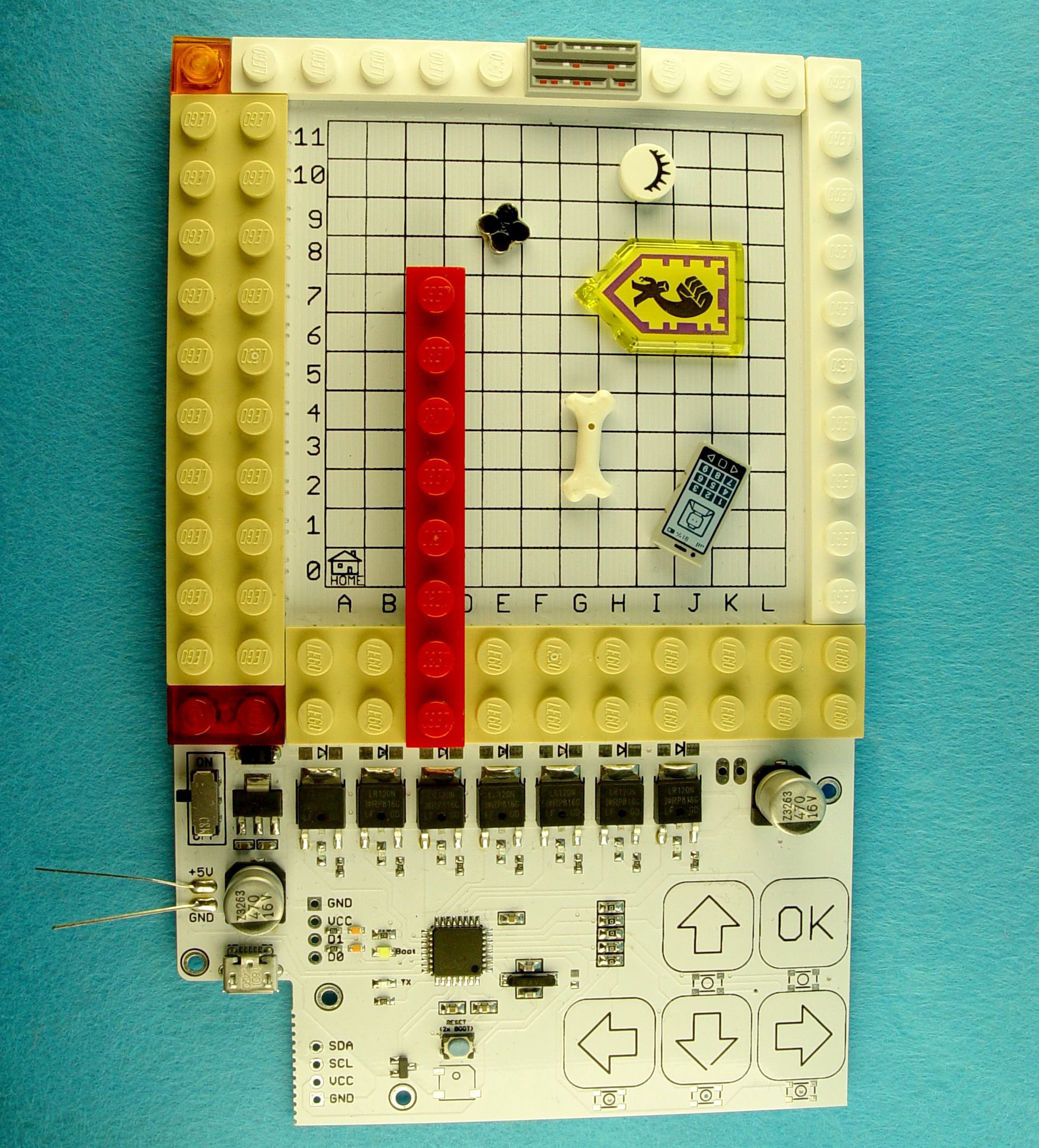
描述:非常适合像卡雷尔这样的语言进行体育教育,可以制作 SKOBAN游戏或解决乐高迷宫。
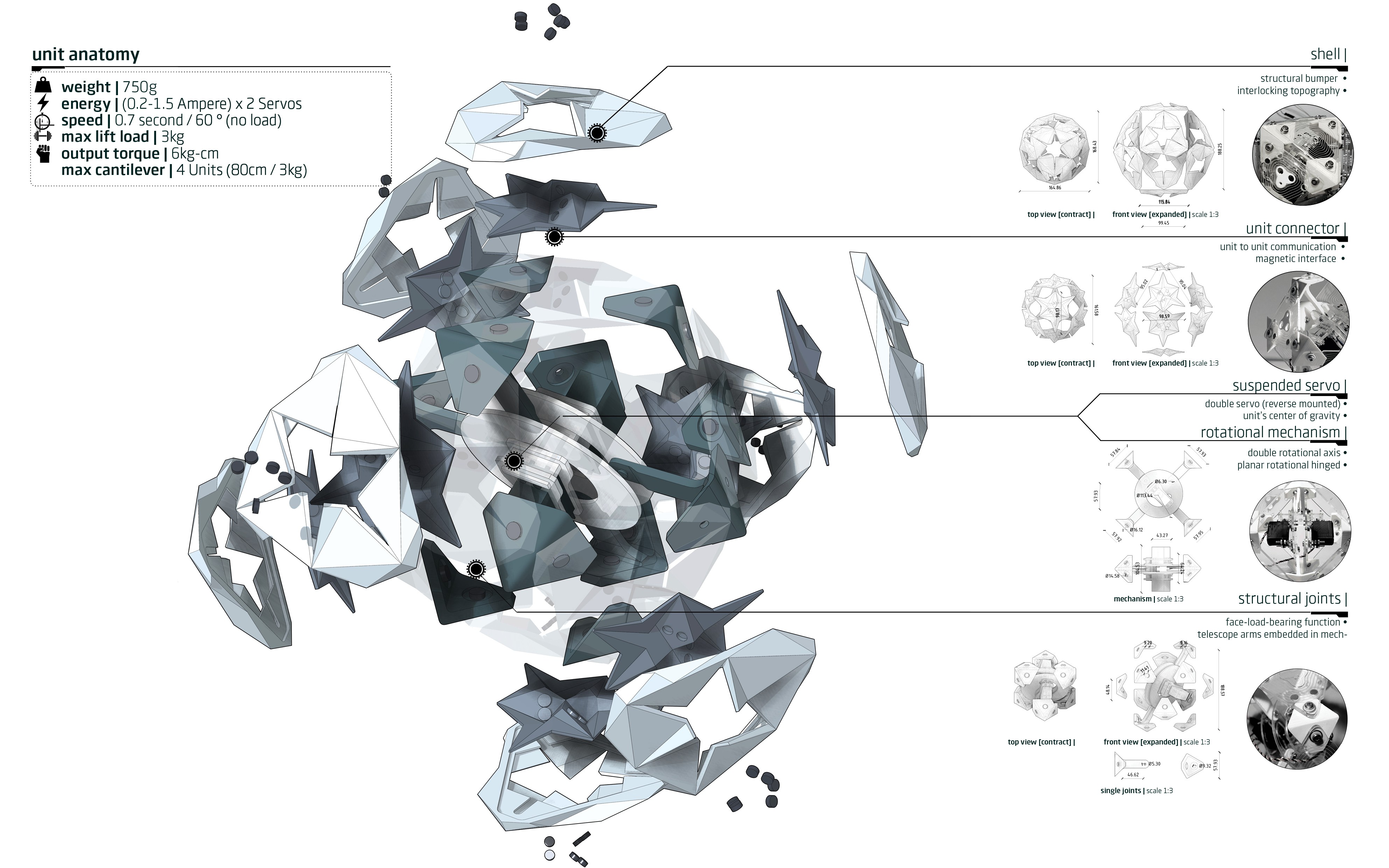
描述:noMad提出了一种自组装系统,该系统标志着从构建环境作为有限生命周期构造转变为自动,非有限和实时解决方案,以动态适应其环境。noMad旨在通过感知系统实现架构,通过自我感知单元将决策制定为单元通信,而不是确定性的叠加建筑计划。锚定在自组织多面体的世界中,noMad基于协同学原理,转换中几何学的研究以及局部变化对其全局系统行为的影响:单个单元可以自主地改变形状,将状态转换为从一个多面体到另一个多面体的简单旋转平移。
描述:一种可以计算相对于24kHz声波信标的位置的设备

描述:用于Raspberry PI的USB隐藏键盘等

描述:Rover是一款3D打印的四轮驱动机器人,你可以在一个小商店里制作。我制造了车辆,所以我可以用它进行计算机视觉研究。
评论
0 / 100
查看更多
 我叫搞事情
我叫搞事情2019-08-19
1783

Copyright © 2024 苏州硬禾信息科技有限公司 All Rights Reserved 苏ICP备19040198号