hackster.io资源汇总: Arduino Mega 2560 & Genuino Mega 2560中类别为 机器人 的部分文章设计
收藏
分享
脑图
图片
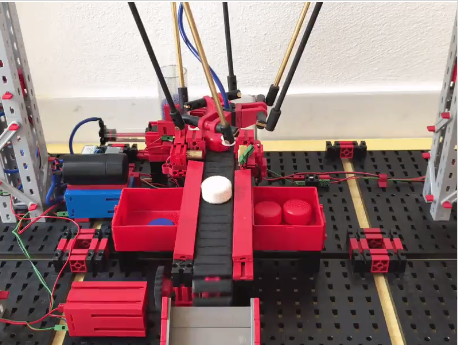
概述:这台delta机器人由fischertechnik(一种源自德国的建筑玩具)制造,由arduino mega控制,是一台相当简单的机器。尽管如此,它并不缺乏速度或精度来完成它的工作:机器人从传送带上挑选物品,并按照颜色对它们进行分类,类似于工业上的挑选和放置机器人。
图片
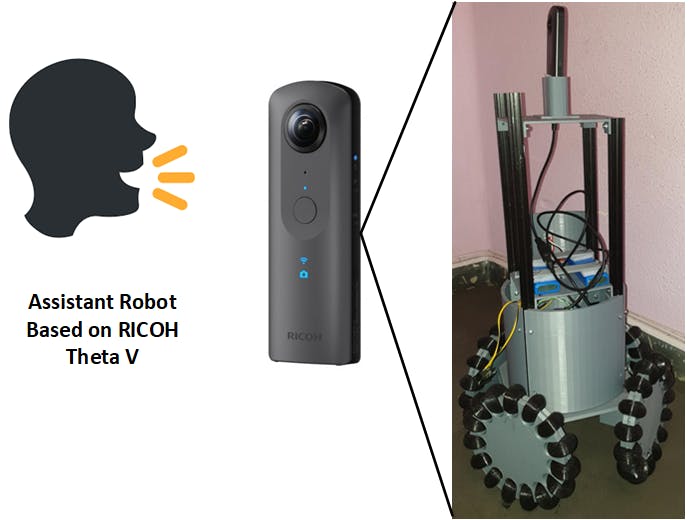
概述:一种全向轮机器人,由理光theta v相机和剪刀控制。这个项目的主要目标是能够实现我的助手机器人的360度视觉(图1)。
图片

概述:将履带式漫游车的机动性和机械臂的多功能性结合到一个能提醒爆炸物处理机器人的设备中。这个项目展示了如何使用两个触感皮肤来控制一个复杂的设备,比如爆炸物处理机器人。机器人本身包括一个履带式漫游车、一个机械臂和摄像机。
图片

概述:jqr四足机器人是一个diy项目,主要目标是建造一个自主的、有腿的机器人,帮助人们进行许多活动。
图片

概述:barbot是一款开源arduino鸡尾酒混合机器人,通过蓝牙与混合移动应用程序进行控制。鸡尾酒可以使用通过蓝牙连接到barbot的移动应用程序(适用于ios和android)来选择。在该应用程序中,您还可以启用/禁用配料、更改每种配料的位置、编辑配方以及更改鸡尾酒中每种配料的用量等。
图片
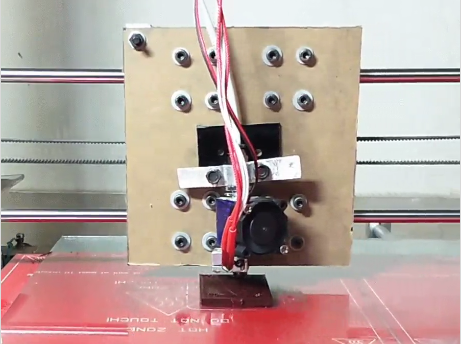
概述:为大学项目制作大型3d打印机(400x400x400 mm)。
图片

概述:实现自己的比特币糖果自动售货机,接受testnet比特币并分发商品。
图片

概述:这个项目中结合了两个特性,蓝牙控制模式和避障模式。
图片
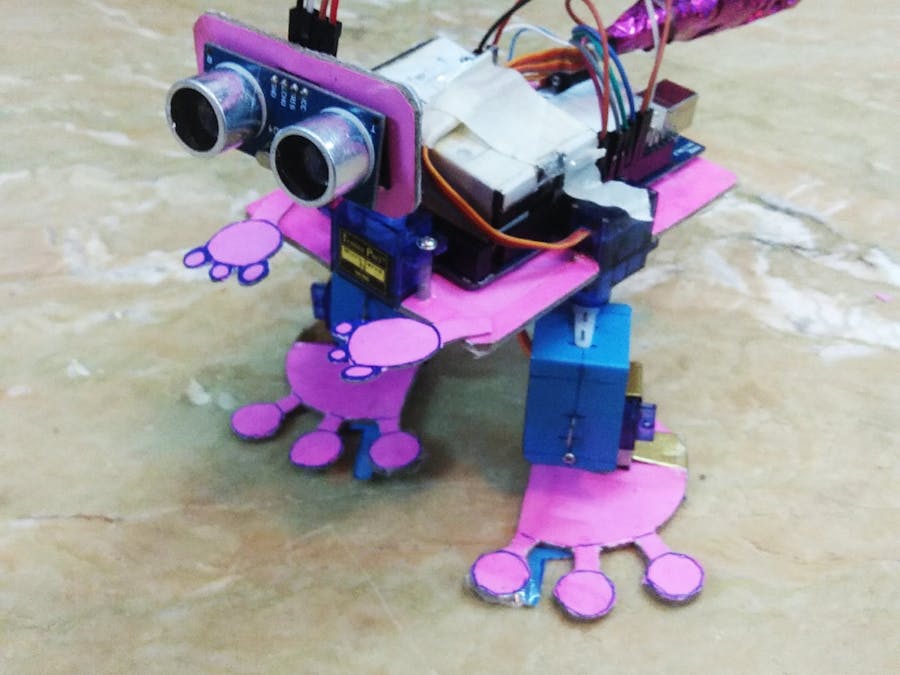
概述:使用arduino的基本机器人。婴儿迪诺是一个基于arduino的两条腿机器人。它基本上使用五个伺服电机,每条腿两个,头一个。它还使用超声波传感器来探测障碍物并避开它们。
图片
_6QYHXeGN2Q.jpg?auto=compress%2Cformat&w=900&h=675&fit=min)
概述:创造了一个gps控制的,配有摄像头的rc船,配有arduino mega和433 mhz遥控器。
图片

概述:nox是一个不错的(耗时的)机器人,它使用带有kinect的slam (ros)在环境中导航。在当前状态下,机器人可以使用slam (gmapping)创建其周围环境的地图(使用kinect深度感知来检测墙壁和障碍物),并在地图中定位自身。它可以规划一条通往给定目标的道路,并避免障碍。
图片

概述:如何为初学者创建自己的arduino培训平台,开始学习arduino编程。
图片
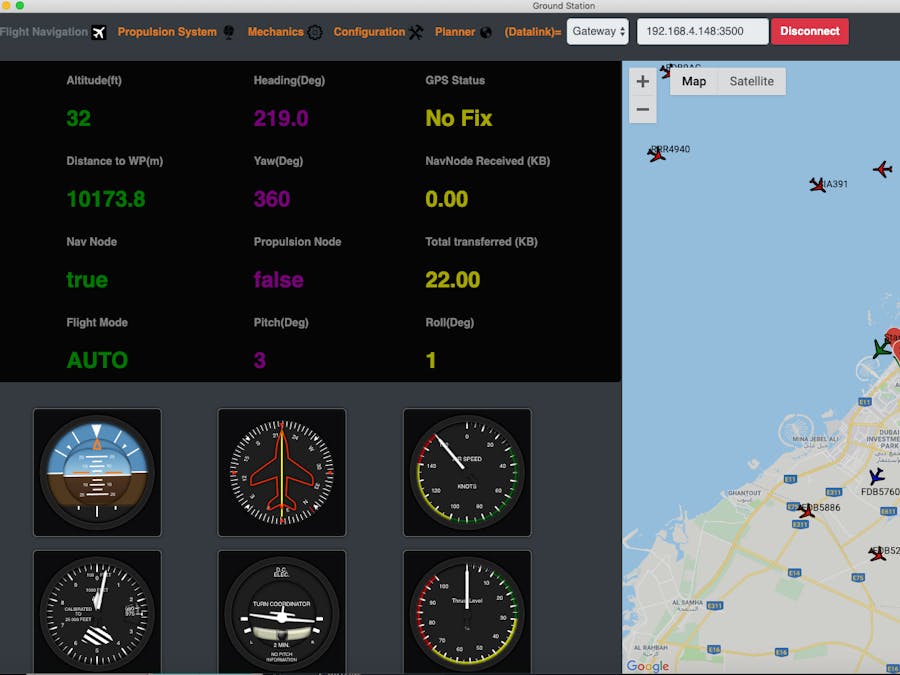
概述:为自主遥控飞机建造地面站。超过20种模式,将采用rpi进行实验性人工智能飞行,携带大量环境传感器。
图片

概述:使用光绘中的概念来创建一台机器,该机器可以使用单个led用长曝光相机重新创建位图。
图片
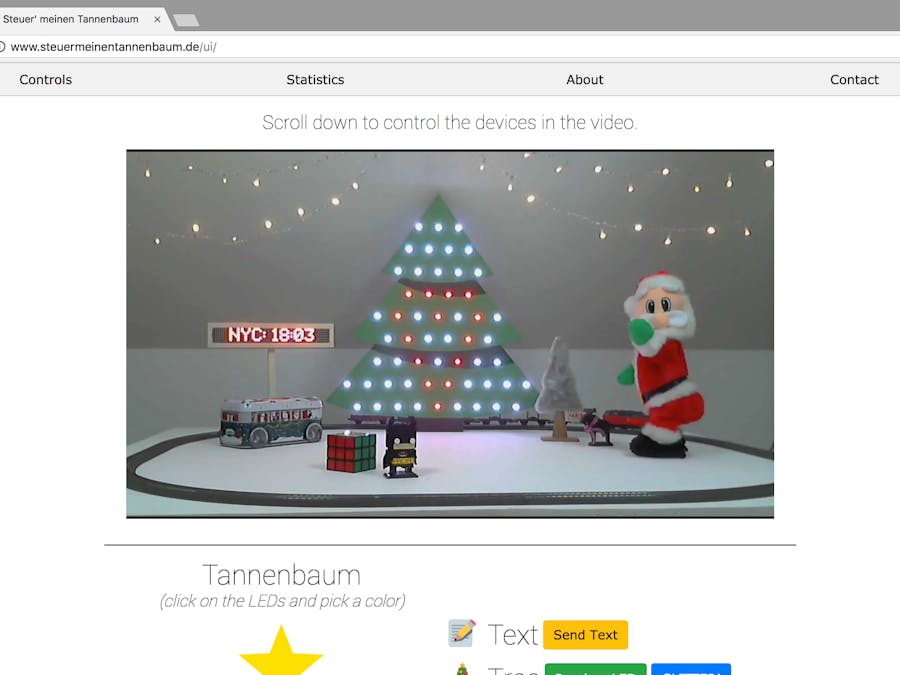
概述:控制树上55个rgb leds中的任何一个,让santa twerk为您工作,控制模型铁路,或者在led点阵上显示自定义文本。
图片
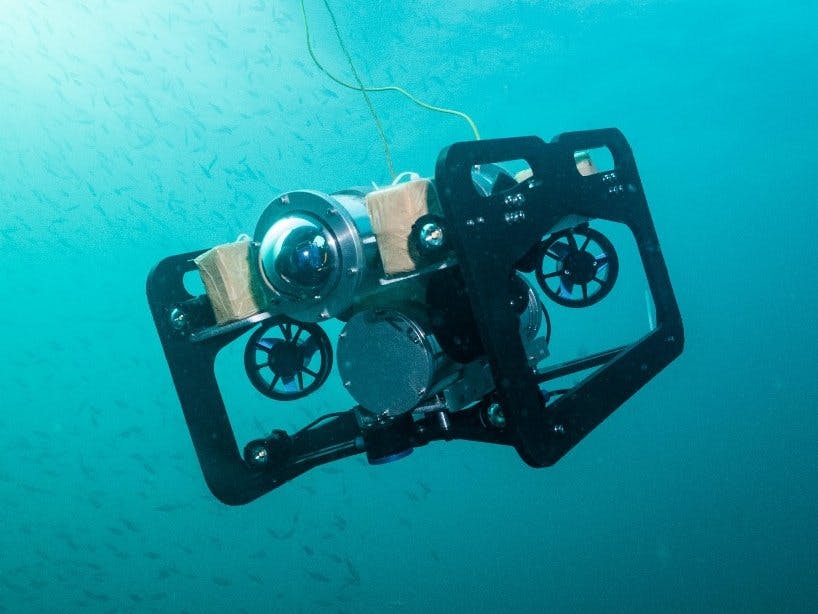
概述:无人机用于持续监控水产养殖行为,如水质、温度、压力、ph值等。
图片

概述:基于开源arduino的工具包,用于学习、构建和调试电子和机器人项目。
图片

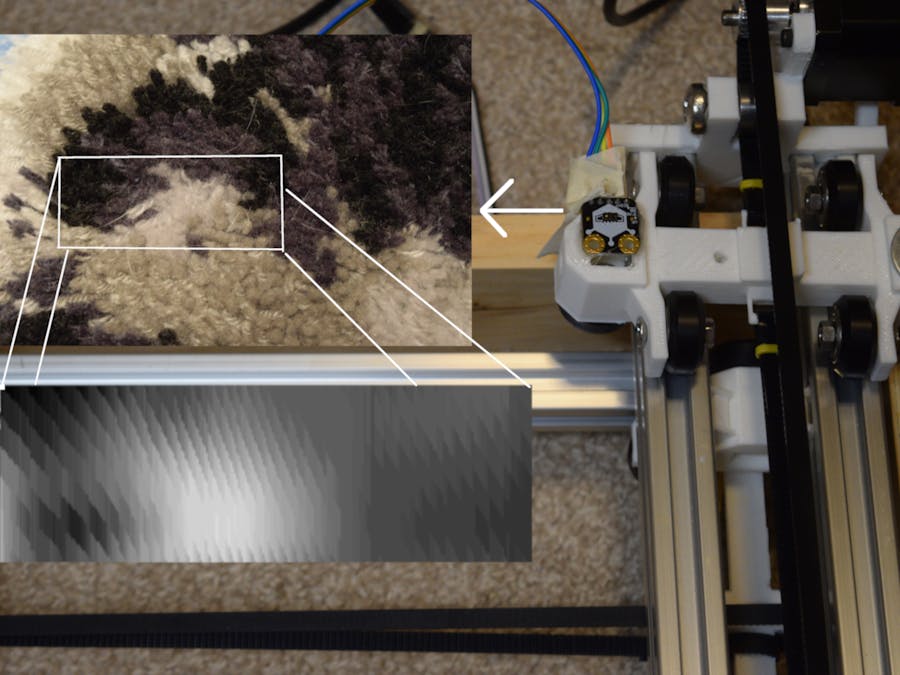
概述:了解如何使用激光雷达传感器和arduino为您的3dr solo构建可配置的前向障碍物检测解决方案。
图片

概述:酷飞蝙蝠!
图片

概述:古董簧片风琴+螺线管+定制驱动板+ 3个arduino megas +蓝牙= midi驱动簧片风琴
图片

概述:本文介绍了如何在机器人项目中使用simulink和arduino对sharp ir传感器(gp2y0a02yk0f)建模和使用。目的是展示如何使用基于模型的设计
图片
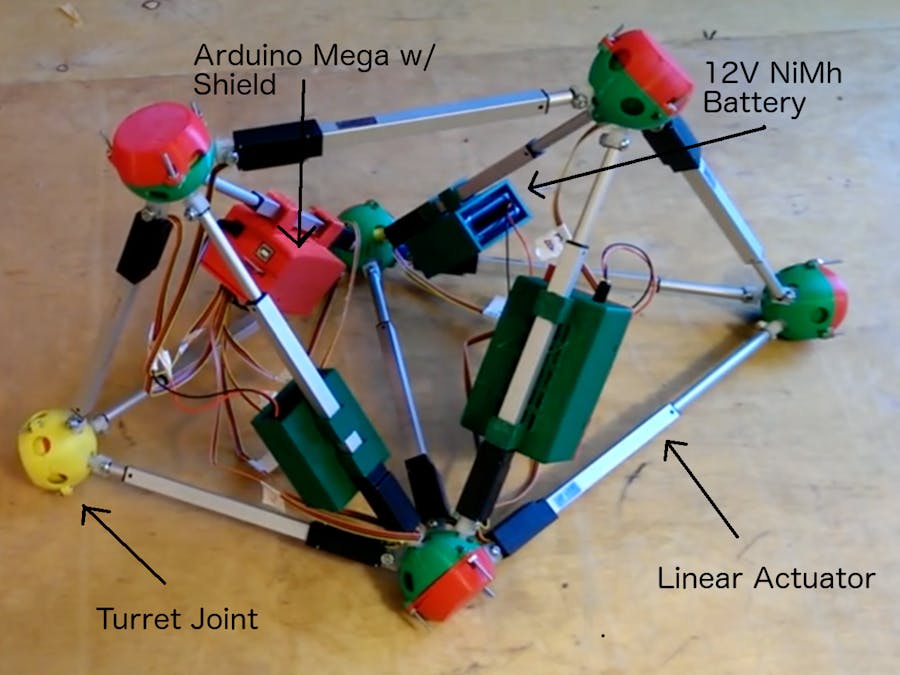
概述:像桁架一样结实,但像鼻涕虫一样移动=闷闷不乐。一种可扩展机器人的激进方法。使用开源6控制器arduino mega shield作为这项工作的一部分。
图片
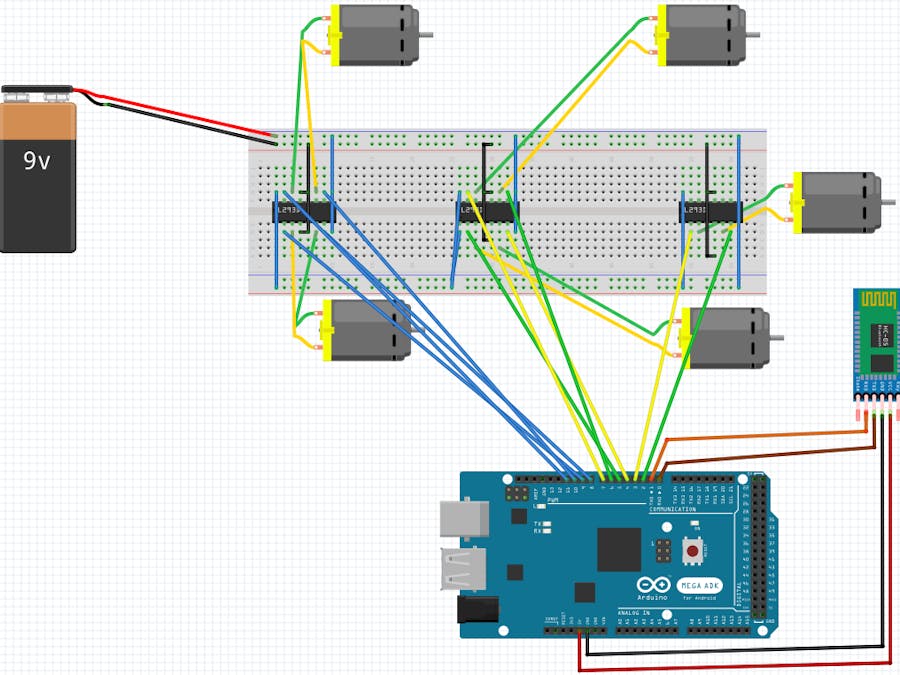
概述:通过android应用程序使用蓝牙hc-05模块和arduino控制机械臂。
图片
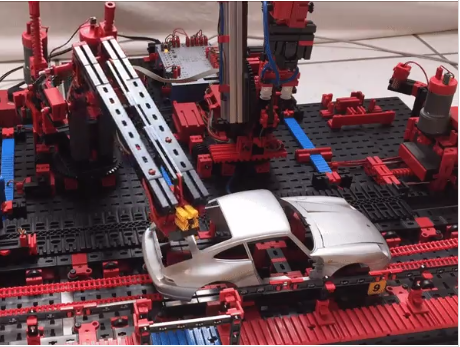
概述:用arduino和fischertechnik模拟一个汽车工厂:两个工业机器人组装一个跑车的发动机罩。
图片
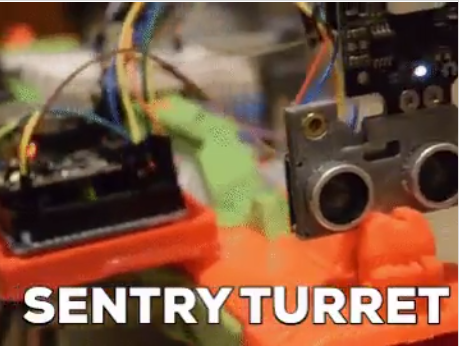
概述:使用pixy 2相机来获取目标,然后自动瞄准nerf枪,然后它可以自己锁定并开火。
图片

概述:编写您最喜欢的音乐,并在卡西欧键盘或项目中描述的两部木琴之一上播放。
图片

概述:一台经济高效的自动鸡尾酒机!它有wifi连接,美观大方,最多可配10杯饮料。
图片
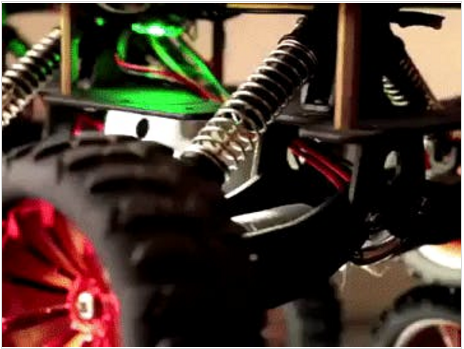
概述:基于arduino的无线监控diy rc机器人。
图片
概述:制作一个由蓝牙控制的arduino动力机器人。rduino通过蓝牙从android手机传输。手机上的android应用程序连接蓝牙网络,然后当按下应用程序屏幕上的按钮时,相应的命令通过网络发送到arduino。然后arduino截取该命令,并根据代码执行指定的操作。
图片
概述:一台只用一个led就能产生图像的机器。它使用光绘画中的技术将led移动到两个轴上。
图片
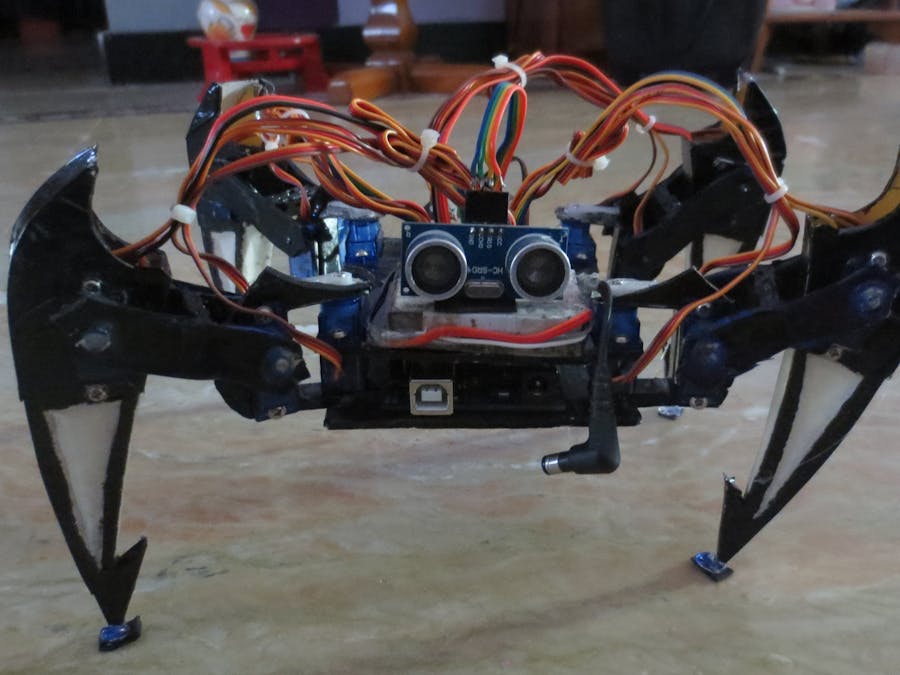
概述:基于arduino的四足动物!四足机器人代表四条腿的机器人,基本上看起来像一只四条腿的蜘蛛,所以让我们学习蜘蛛是如何行走的,并尝试用arduino复制它。
图片

概述:roger bot除了内置的蓝牙程序外,还可以定制编程,用于机器人手臂和漫游功能。
图片

概述:一个机器人捐赠箱,吸引捐赠者,并根据他们的捐赠创造合作视频艺术。
图片
概述:arduino的多任务解决方案。
图片
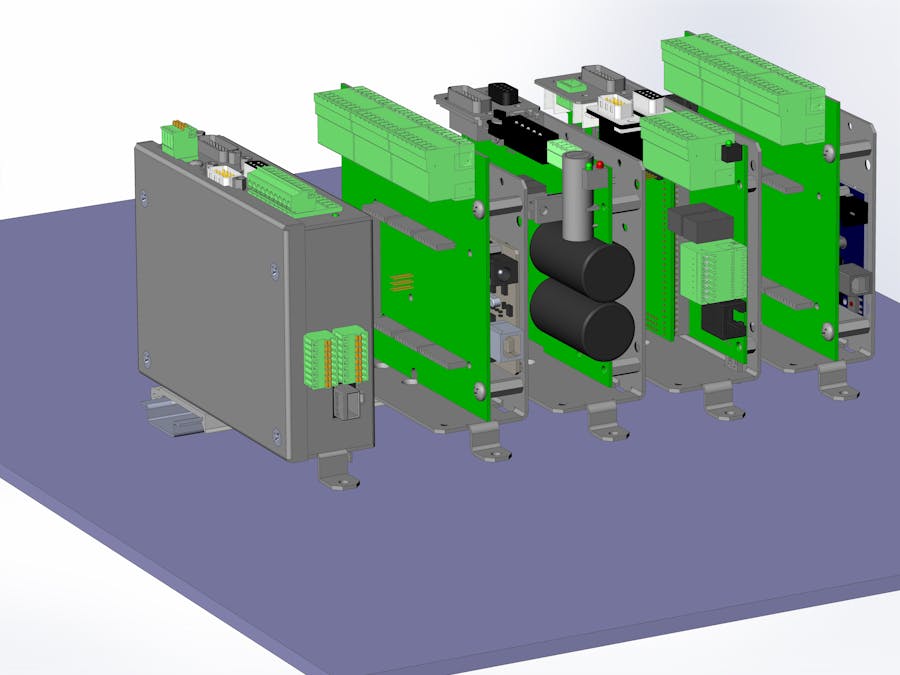
概述:利用arduino兼容的产品& s/w,把设计和制造定制的工业控制产品包装成整洁、干净、稳定和(容易地!)可再现,并兼容24vdc电源。
图片

概述:了解如何使用simulink和arduino对传感器建模并获得可靠的距离测量。添加一个arduino模块,当arduino数字输入之一触发中断服务例程(isr)时,该模块可以调用中断服务例程。使用中断来响应当物体过于靠近红外传感器时发生的事件。当机器人接近某物时,它会发出警报信号。
图片
概述:有鉴于此,开发了一个交互式机器人原型。markus旨在通过与公司客户互动和吸引人的方式,评估和记录任何公司或企业对服务的看法,将服务时间转化为快乐和满意的时刻,以客户第一和他很快回来为使命。
图片
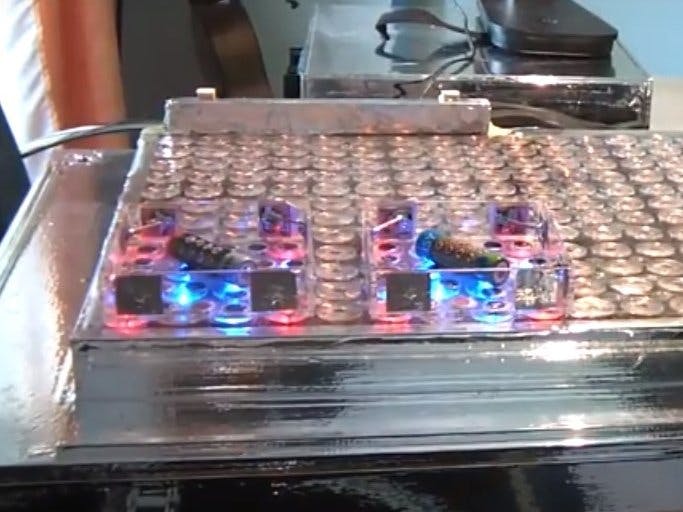
概述:电磁车道上的区域步进电机。基本的物理工作系统仅基于电磁力来保持和驱动。。
图片

概述:这个项目的主要目标是建造一个能够在崎岖地形中移动和收集数据的移动机器人。这种机器人可以用来巡视你房子周围或难以到达的危险地方。这个机器人可以用于夜间检查,因为它配备了一个强大的反射器,可以照亮它周围的区域。
图片

概述:无人驾驶飞行器是一种无人驾驶飞机。它的飞行可以由车内的计算机自动控制,或者在人的直接指挥下通过遥控来控制。
图片

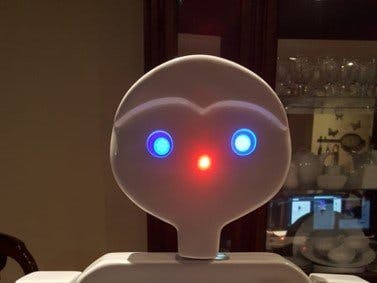
概述:使用基于snips的语音识别系统来控制机器人平台。语音识别系统的引入与snips(图1)的情况相同,它促进了人和机器人之间的交互形式。这样我们就实现了自然的互动,因为snips识别并执行人类提供的命令。这样,人类可以询问天气状况、新闻或命令它移动。
图片

概述:bpi nb-iot arduino开发板,采用高通芯片设计。
图片
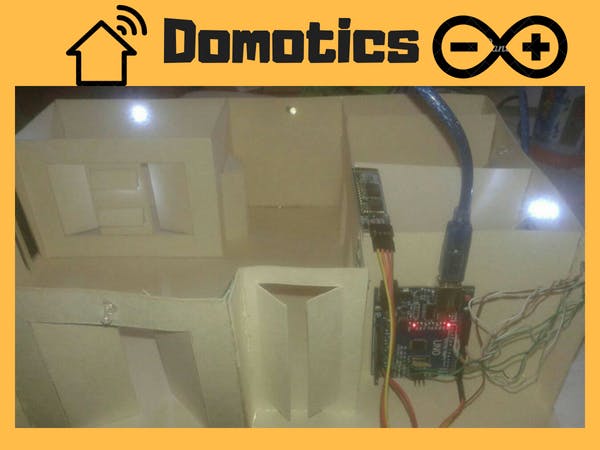
概述:建立一个比例模型来演示通过蓝牙和arduino进行灯光控制的操作。
评论
0 / 100
查看更多
2019-08-15
1708

Copyright © 2024 苏州硬禾信息科技有限公司 All Rights Reserved 苏ICP备19040198号