用树莓派Pico/RP2040制作逻辑分析仪的资源
收藏
分享
脑图
用树莓派Pico/RP2040制作逻辑分析仪的资源
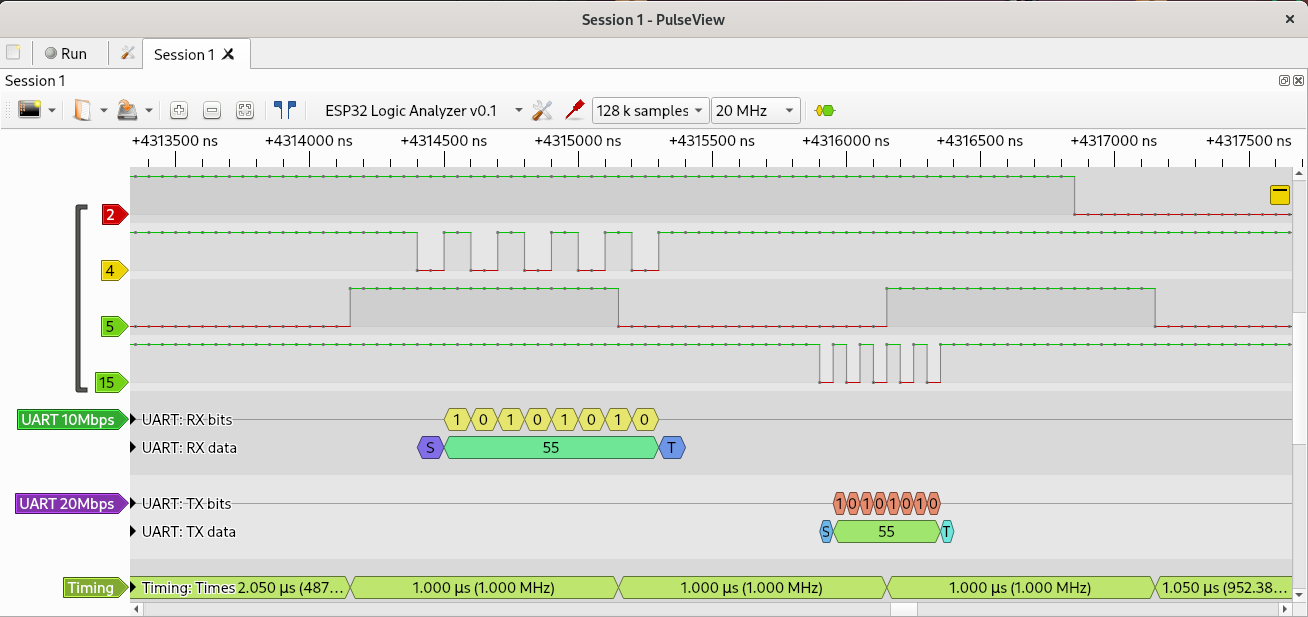
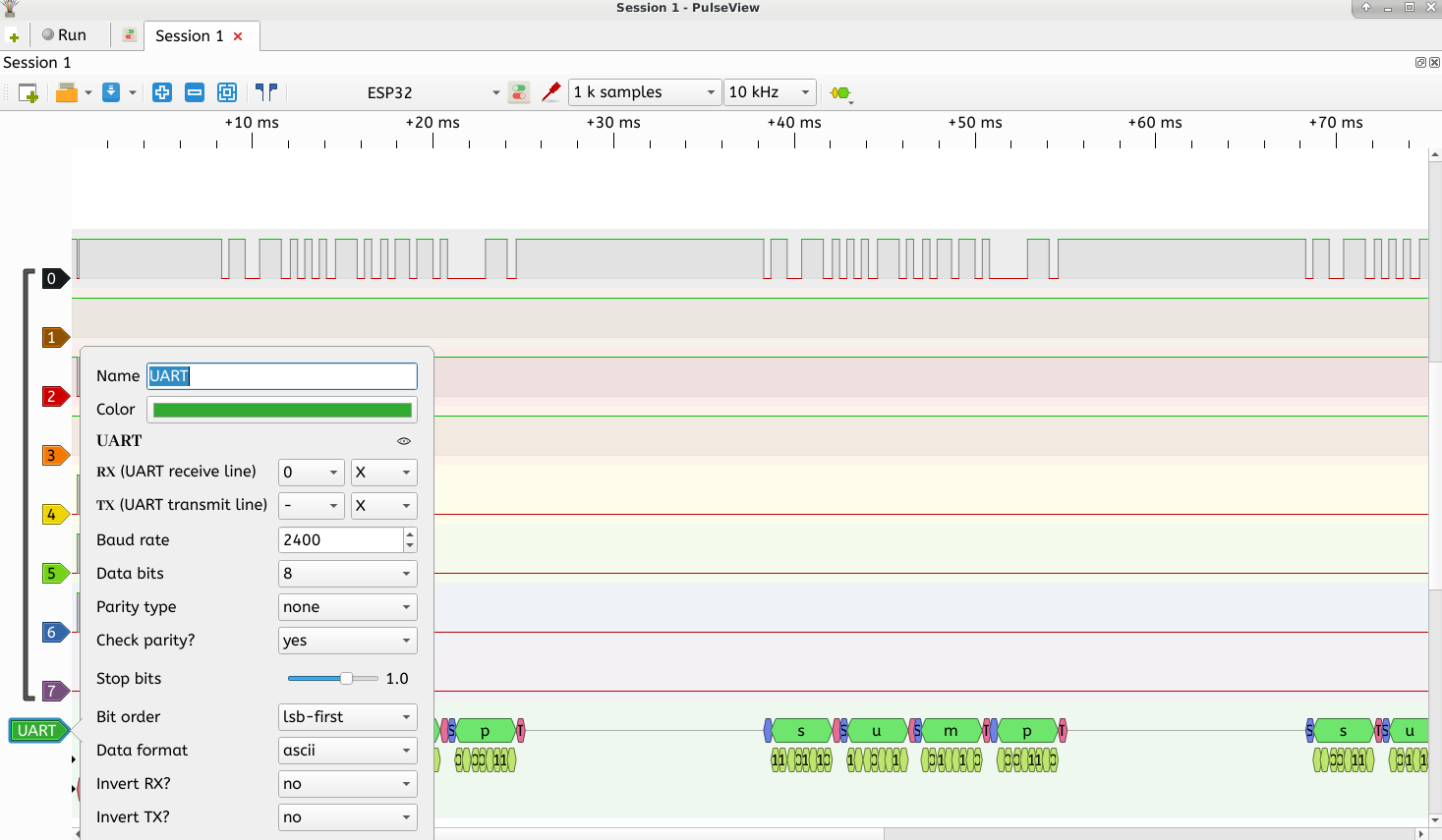
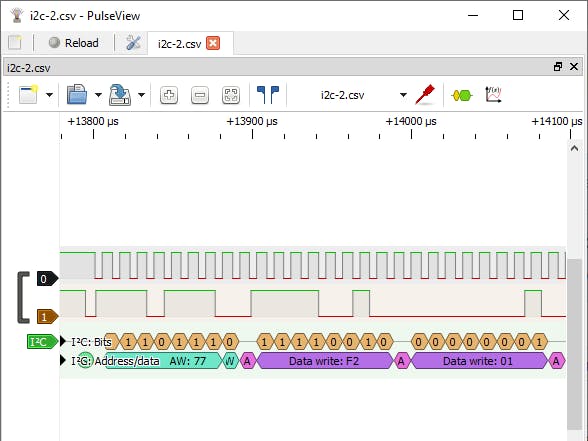
PulseView (sometimes abbreviated as "PV") is a Qt based logic analyzer, oscilloscope and MSO GUI for sigrok.
评论
0 / 100
查看更多
 refdesignshare
refdesignshare2021-12-16
8316
树莓派PICO
RP2040
逻辑分析仪

Copyright © 2024 苏州硬禾信息科技有限公司 All Rights Reserved 苏ICP备19040198号