Hackaday.io上的树莓派项目-Mr. Runner
收藏
分享
脑图
Hackaday.io上的树莓派项目-Mr. Runner
关于项目
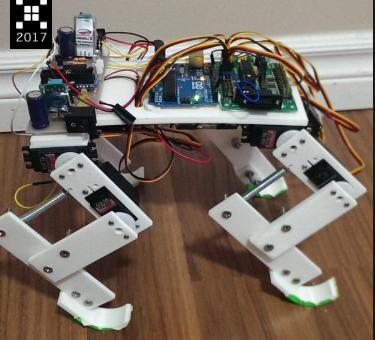
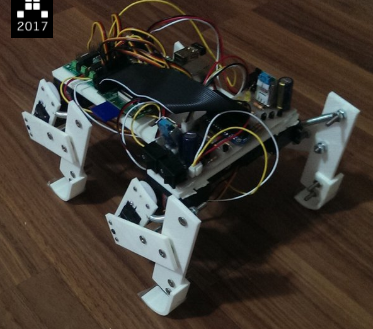
项目描述:该项目的目的是降低进入动态机器人的门槛。看过《波士顿动态》的野猫后,我对做类似的事情很感兴趣,但对最爱好的场景所提供的东西感到失望。他们都使用静态运动。我想它感觉活着!我希望,如果人们能够看到这种机器人风格是可重现的基本发展技能,它将吸引更广泛的人腿机器人不只是那些谁希望看到一个模糊的蜘蛛看起来设备重新实现相同的运动方程一遍又一遍。这种方法基于2000年代中期苏黎世大学的富米亚·伊达和罗尔夫·普菲费尔的工作。Pfeifer博士在认知科学领域是众所周知的,这些实验是试图基于这些原则在四足机器人中产生运动。
项目图片

1 X 锡
8 X HS-422
4 X HS-5685
1 X SSC-32
1 X 树莓派 B
1 X 博茨博伊诺
4 X 扩展弹簧
1 X 蓝牙配合银
1 X 12V 5A 电源砖
1 X 25W 可变开关稳压器
1 X NB100
1 X 各种电路组件
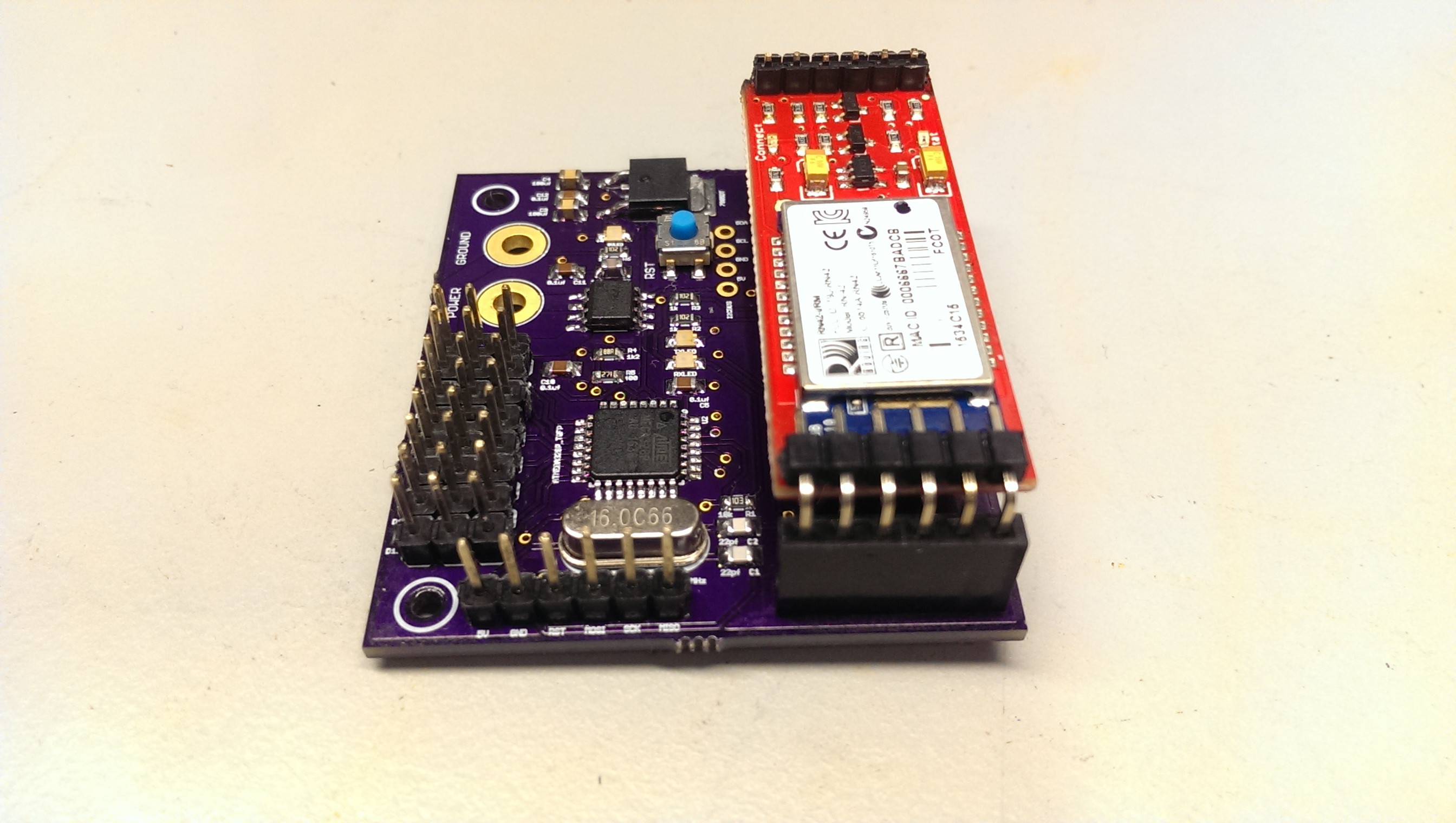
这是上一个日志中讨论的主板的改进版本。主要的区别是,这一个工作。
更改包括删除 QFN 包、更好的间距和适当的跟踪路由。
这里需要改进的主要领域是将蓝牙模块集成到主板中。
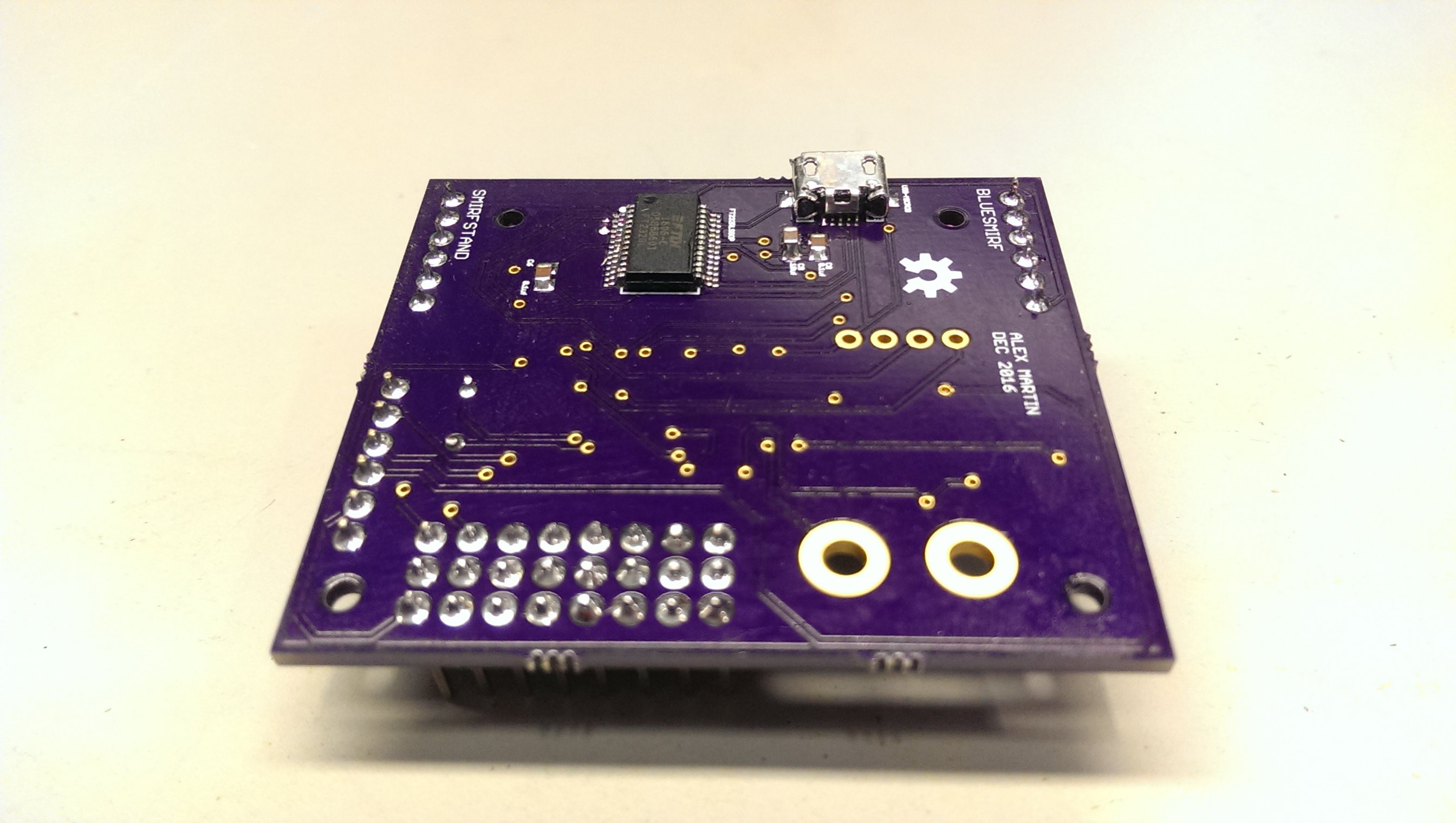
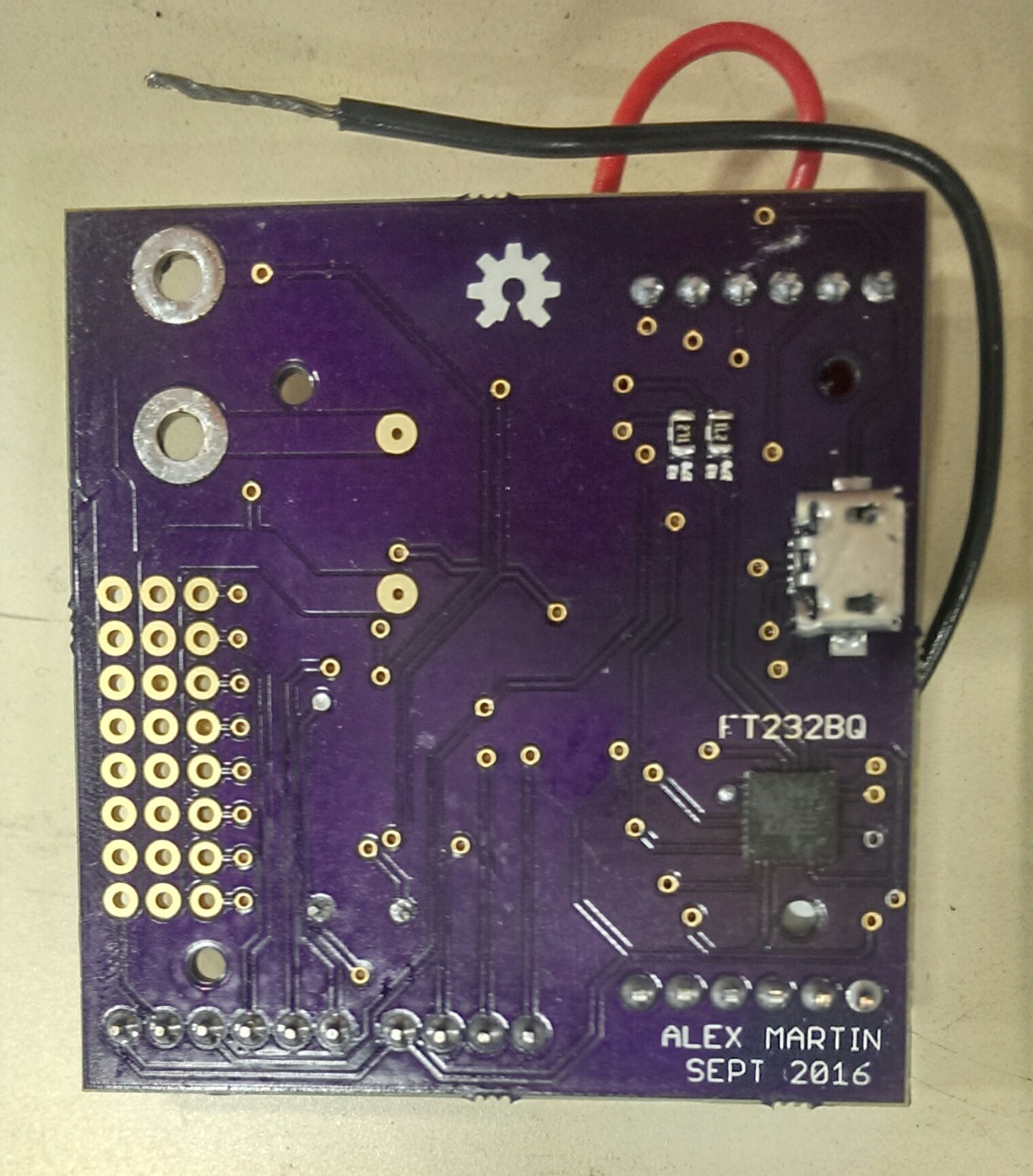
几周前我把董事会放在一起, 但一直无法让它正常工作。我成功地在 Atmega 上安装了 Arduino 引导加载器, 但无法将草图加载到它上。从我可以告诉这是因为重置引脚没有举行在 5v (由于我不明白的原因) 。这是令人困惑的,因为主 Arduino 使用从属 Arduino 的重置引脚来上传引导加载程序。
FTDI 芯片也不起作用。调试很难,因为我没有在电路板上创建任何测试点。它不会出现在 /dev 目录中,并且使用 FTDI 实用程序不会将我引到任何地方。
我将离开这个董事会,现在一样,并记住失败为下一个修订。我使用QFPs代替QFN,以防坏焊点连接是故障的原因(我多次重新焊接两个芯片,每次用显微镜检查)。我还将向 FTDI 芯片添加测试点,以帮助调试。
下面是焊接板的图片(是的,这些是胸围线)。至少放在一起很有趣!

这个板是基于令人难以置信的博板由山猫运动。它删除了一些功能(扬声器、某些 IO 等),并添加了一些功能。新增功能包括:
电流感应 (ACS715)
- 蓝牙(蓝色微笑)
- 带环形端子连接器的多汁电池轨迹
设计的前提是保持组件尽可能紧(因此主要是表面安装),伺服连接器/电源连接器在同一侧,USB连接器与伺服器/电源相反。这个板将安装在机器人的后体
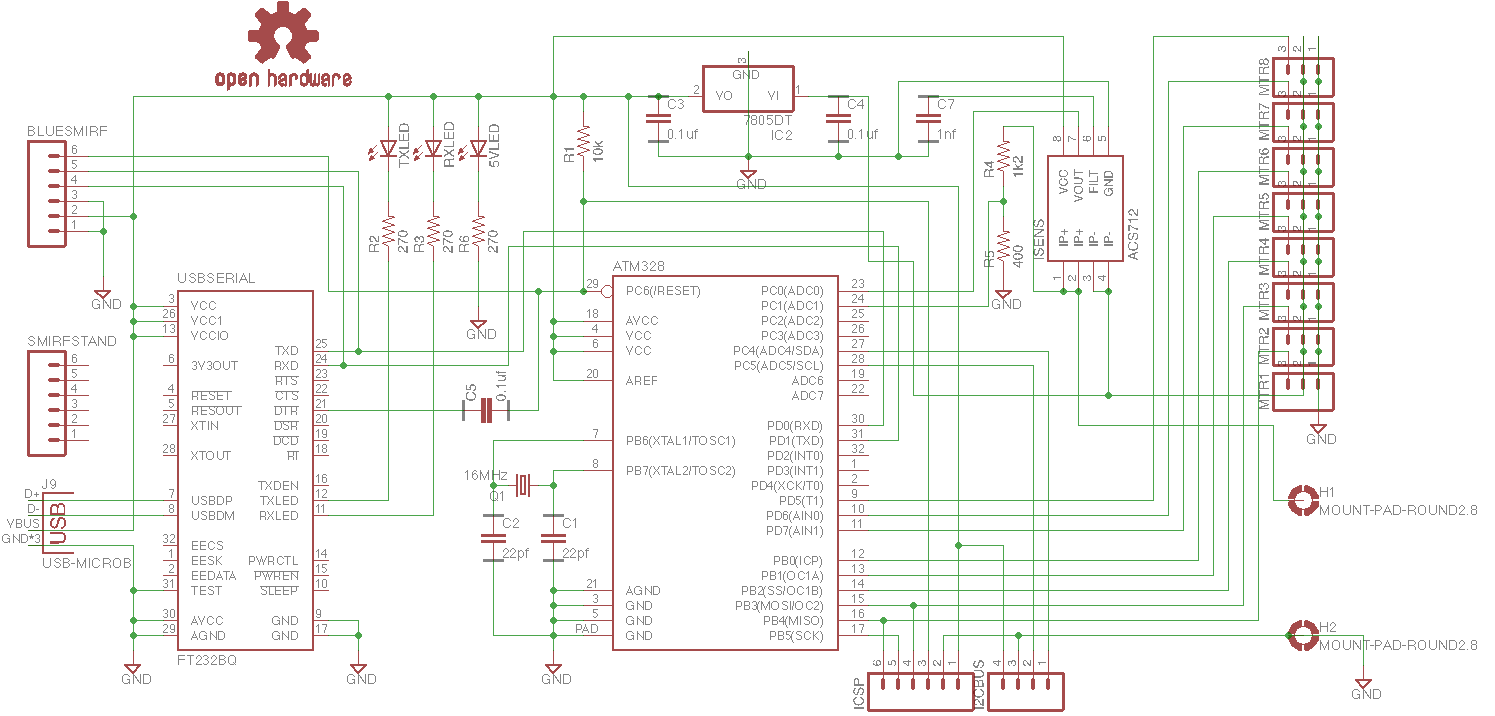
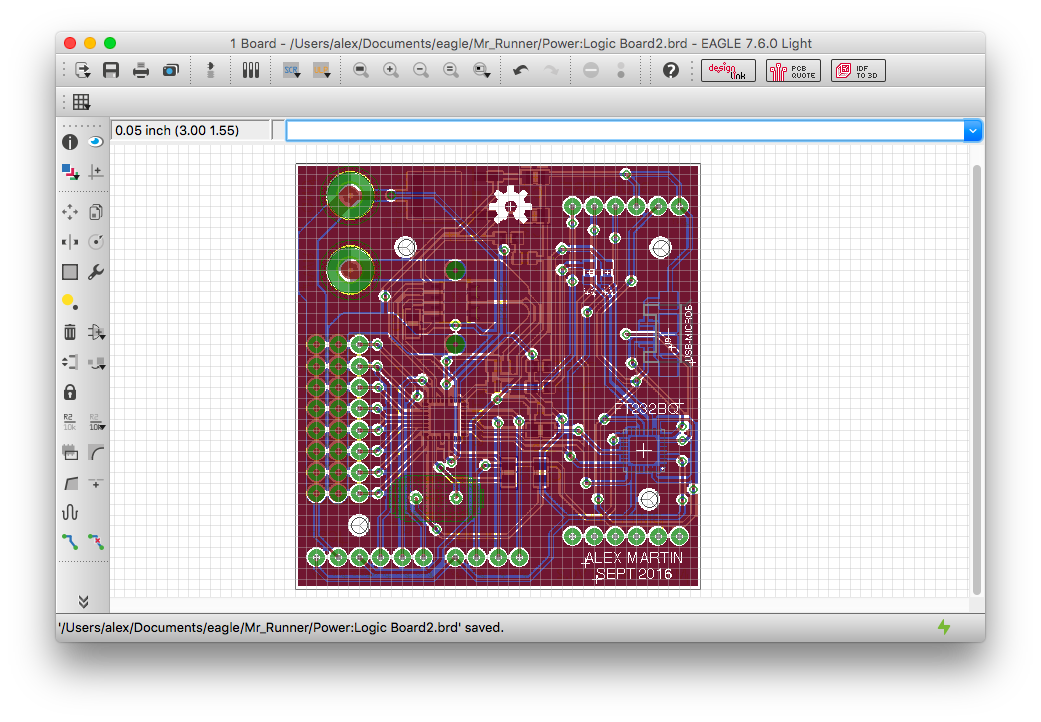
原理:
板视图:
评论
0 / 100
查看更多
2020-08-28
1046

Copyright © 2024 苏州硬禾信息科技有限公司 All Rights Reserved 苏ICP备19040198号