Hackaday.io上的树莓派项目-蚀刻白板
收藏
分享
脑图
Hackaday.io上的树莓派项目-蚀刻白板
关于项目
项目描述:我们的项目是在协助高级、大规模原型设计和起草工作的背景下设计的。通过创建一种能够从任何照片中绘制大规模真实矢量图像的机器,我们的研究力求提高一般人的艺术"技能"。当我们注意到缺乏这样一个有用的工具,以及它可能拥有的所有潜在用途时,我们受到启发,创建这种绘图援助。这种自动绘图工具可以彻底改变教室设置,并永远改变我们制作原型的方式。项目以令人满意的功能状态终止。Etch-A-Whiteboard 可精确呈现指令文件,以精确线条跟踪图像的边缘。持续的问题包括散热和逻辑电压差异。
项目图片
抽象
我们的项目是在协助高级、大规模原型设计和起草工作的背景下设计的。通过创建一种能够从任何照片中绘制大规模真实矢量图像的机器,我们的研究力求提高一般人的艺术"技能"。当我们注意到缺乏这样一个有用的工具,以及它可能拥有的所有潜在用途时,我们受到启发,创建这种绘图援助。这种自动绘图工具可以彻底改变教室设置,并永远改变我们制作原型的方式。
这个项目成功实施的关键就是像我们希望通过树莓派的方向在棋盘上移动笔。从 3D 打印机和激光切割机中汲取灵感,我们决定使用图 C.1 绘制的两个导轨系统,并添加一个笔架来控制它移动时是否绘制。两个轴是水平的,穿过白板的顶部,垂直的,它移动整个板,并移动笔架上下。最终产品与图非常匹配,如图 C.2 所示。
为此,Etch-A-Whiteboard 将复杂的边缘检测算法与精确的直流步进电机结合使用。在构建蚀刻-A-Whiteboard 的过程中,遇到了许多问题,并随后得到解决。解决的难题包括不必要的重部件、扭矩不足的步进电机、大型 3D 打印机公差、电源问题和模拟线性执行器控制机制。但是,在设计阶段内置于项目中的大时间缓冲器可以克服这些挑战,并且仍然能够及时完成蚀刻-A-Whiteboard。
项目以令人满意的功能状态终止。Etch-A-Whiteboard 可精确呈现指令文件,以精确线条跟踪图像的边缘。持续的问题包括散热和逻辑电压差异。
介绍
我们的项目是在协助高级、大规模原型设计和起草工作的背景下设计的。通过创建一种能够从任何照片中绘制大规模真实矢量图像的机器,我们的研究力求提高一般人的艺术"技能"。当我们注意到缺乏这样一个有用的工具,以及它可能拥有的所有潜在用途时,我们受到启发,创建这种绘图援助。这种自动绘图工具可以彻底改变教室设置,并永远改变我们制作原型的方式。
这项技术的应用多种多样。它在教室里的潜在用途不容夸大。例如,设想一位电子学教授为学生绘制电路图。虽然这个图制作得很好,可以理解,但它是手绘的,他所有的学生不可能同时看到。他可以拍一张照片,并投射到他的教室-但这使得他的图表无法马尔不可破和静态。但是有了这样的自动绘图机,他可以完美地重现白板和黑板上的图表,但依然可以编辑,让每个人都能以最佳方式学习和学习。
同样,考虑一张过于复杂的照片或图表,人类无法准确、高效地再现。自动绘图机能够绘制图像太乏味或太难的人,并可靠地执行此任务每次。当然,这种准确性和效率在制造中具有潜在的用途。将自动绘图机想象为巨大的海报制作者或蓝图制作者是非常可行的:只需将一张纸贴到表面上并绘制图像即可。制作大型海报或蓝图通常需要访问昂贵的巨型打印机,只有大型企业集团才能使用。自动绘图机可以以成本的一小部分完成相同的任务。
我们的研究重点是创建该设备的工作原型。它被称为"蚀刻-A-白板",它代表了这种自动绘图机的早期迭代。我们项目的最终目标是让该项目能够实现三个不同的目标。
首先,它能够将图片(如 JPEG 或 PNG)转换为树莓派可以执行的指令文件。其次,Pi Pi 将能够执行指令文件来驱动两个步进电机,并在两个轴中移动笔架,而笔架具有一对线性执行器,使笔能够向上或向下。第三,这两个系统将足够准确,Etch-A-Whiteboard能够绘制图像,不仅准确和可识别,而且看起来也很好。第三个目标需要仔细规划、工程和施工才能完成。
Etch-A-Whiteboard 最大的限制之一是它缺乏前身。由于我们正在制造有史以来第一台大型自动化原型设计和绘图机,因此几乎没有工作、研究或零件设计用于我们尝试完成的工作。许多问题似乎只有我们独有,解决办法很少是直截了当的。
文学评论
由于我们的项目被设计为一种独特的创新,因此没有与我们的工作相关的预想文献。我们检查的文献大部分以数据表、编码网站和在线论坛的形式出现。其中,我们发现麦克马斯特-卡尔、SparkFun电子和Python软件基金会最有帮助。这些站点的信息几乎总是准确、编写良好且易于查找。另一方面,Firgelli Technologies 的文献功能最不一,我们不得不去外部的第三方网站,甚至找到我们操作的线性执行器的类型。
灵感
我们俩都不擅长画画。我们注意到房间后面有一块未使用的白板,想也许我们可以做一些可以吸引我们的东西。从那里,在我们的研究表明,没有这样的设备存在后,我们开始思考自动化原型机的所有潜在用途,蚀刻-A-Whiteboard诞生了。
硬件采集
由于大部分项目是定制的,许多零件是制造的,而不是购买的。对于那些,我们主要使用三个网站。我们从制造和工程基地麦克马斯特-卡尔公司购买了正时皮带和铝滑轮。从一家电子网站阿达夫鲁伊特(Adafruit)收购了树莓派,从另一个电子网站纽格(Newegg)收购了两座H桥。最后,我们从位子购买了两个磁力驱动步进电机。其他硬件,如钢棒或晶体管,从机器人、电子和原型实验室的供应箱中被征用。
方法和结果
这个项目成功实施的关键就是像我们希望通过树莓派的方向在棋盘上移动笔。从 3D 打印机和激光切割机中汲取灵感,我们决定使用图 C.1 绘制的两个导轨系统,并添加一个笔架来控制它移动时是否绘制。两个轴是水平的,穿过白板的顶部,垂直的,它移动整个板,并移动笔架上下。最终产品与图非常匹配,如图 C.2 所示。
材料清单
完整的物料清单可以在附录 B 的表格格式中找到。此物料清单按系统划分,电子、框架和轴都有自己的物料分配。许多系统组件,特别是那些三:D打印、激光切割或其他手工制作的组件,仅由设计它们所用的原材料来表示。
水平轴
在图 C.3 中看到的银槽,其中车轮被包含,沿白板顶部运行。它由两个铝角制成,在固定距离处被 Vex 零件弯曲成 U 形(如图 C.3 所示)。然后,角度和 Vex Us 牢固地连接到框架上,图形 C.3 中可以看到钣金螺钉。这些螺钉还用于固定一系列刮塑管。这些管子被发现是偶然发现,在图C.3的车轮之间的空间宽度,因此被用作一个轨道,以保持车轮在行。这是必要的,因为我们的铝槽的额外空间,使车轮滑来滑去太多。
图 C.3 和 C.4 中显示的绿色部分将水平轴连接到垂直轴,并允许垂直轴移动。它通过通过图 C.4 中看到的三个孔拧紧螺栓,从而抓住垂直轴的杆,让我们精确调整杆的高度。另一边,它容纳三个小 Vex 四轮与自定义打印插入,以举行他们到位。这部分和它的车轮单独支持整个垂直系统的重量。
尽管其重量和惯性,垂直轴和持有它的零件很容易在铁轨中滑动。系统由单个皮带移动,如图 C.3 所示,由红色 3D 打印件连接。该皮带在两端的滑轮上循环,滑轮可自由旋转,车轴上有一个齿轮,由下方的步进电机驱动,如图 C.5 所示。
垂直轴
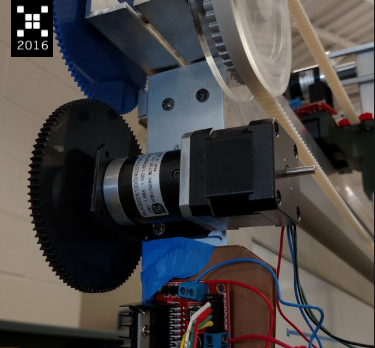
垂直轴(如图 C.2 所示)通常由一个长铝杆组成,两端各有一个滑轮,两侧有一个皮带,它们连接到笔架上,以及一个与其中一个滑轮连接的步进电机。滑轮在 3/8" 轴上自由旋转,衬套穿过杆。顶部滑轮有一个步进电机同轴连接在后面,如图C.6所示。一个孔钻入一个3/8"轴的中心和侧面,使步进电机可以容纳在里面,并可以使用固定螺丝固定到位。一个德尔林板被拧入极点,另一个被拧入步进电机,然后它们被连接到一个固定的长度,使用图C.7所示的空格。电池组和 H 桥模块坐在车轮顶部,将在下面更详细地介绍。
在垂直轴的底部是一个自由旋转的滑轮和另一个轮式保持部分(见图C.8和C.9)放在底部导轨上,支撑一些重量,并防止太多的摆动。它必须有一个洞穿过它为轴,和一个额外的缩进,以适应衬套。最后,车轮被拆下,使图 C.8 中的蓝色塑料片只靠在板的底部。之所以做出这一选择,是因为我们发现车轮接触底部导轨,使杆移动毕竟不那么平稳。
笔架
笔架的核心是两个定制的三:D 打印部件。这两个部分设计用于使 Y 轴上下平滑和流畅的运动,并实现笔的提升和下降。
第一个三-D 打印零件设计用于在 Y 轴上下平稳滑动。如图 C.10 所示,方形切口允许将 Delrin 板插入塑料部件和金属轴之间。这有助于减少笔架和 Y 轴之间的摩擦量,因为 Delrin 具有非约束性。此外,此部件还有空间容纳两个线性执行器,一个在孔的两侧,通过该孔,世博标记可以自由移动。这些线性执行器通过螺钉和螺栓固定在塑料上。在距离Y轴最近的这一部分的一侧设计了几颗牙齿,如图C.11所示,它允许皮带夹紧到零件上,并操纵男人上下金属棒。最后,有三个小孔,其中放置螺纹孔,其中连接到小弹簧,拉下张力。
图 C.12 中的第二个三-D 打印部件设计用于刻板地保存世博会标记。零件的内部腔室足够宽,可以平滑地安装标记,使其在紧固螺母和螺栓之前精确对齐,以牢固地将标记固定到位。与第一部分一样,设计了三个小孔,以允许螺纹孔。最后,两侧的两个大机翼允许线性执行器推动笔架上,提高和降低笔架。
这两个部分通过使用弹簧协同工作。当线性执行器脱离时,弹簧将标记与白板保持紧密。当执行器接合时,标记从白板上抬起。该系统高效工作,允许沿 Y 轴进行运动,并在 Z 轴中保持有限运动。
电子
在图D.1中显示了电子配置的简化图。
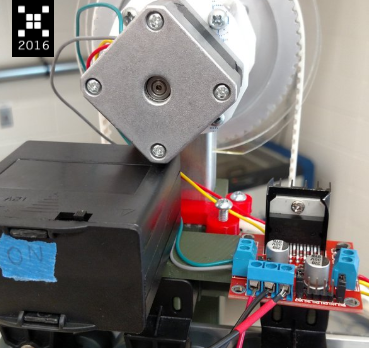
步进电机需要的电流比树莓派可以供应的电流要高得多,超过 2 安培,这意味着我们需要一个电源和控制模块。图 C.6 中的红色电路板是一个这样的模块,其核心功能是作为 H 桥。此模块允许我们将 Pi 的单独电源与 Pi 连接,以便我们从墙壁上获得所有电源,但 Pi 仍控制步进电机内激活的磁铁,以及按哪个顺序激活。要迈出一步,有四组引脚必须按正确的顺序触发,见附录一中的代码。
线性执行器还需要 12V 电源,但我们没有相当于步进电机的 H 桥的集成电路。不同晶体管电路的许多迭代在电压从3.3V到5V之间进行测试。Pi 也不够强大,无法驱动执行器,也没有 3.3V 逻辑适合作业的电压。不幸的是,我们没有完成电路来控制执行器,但当我们这样做,它可能会类似于步进电机的设置,虽然有一个更简单,自制电路。
代码
有两个不同的过程需要编码:找出要绘制的,使步进电机以这样一种方式移动,以绘制计算结果。由于这两个任务与生机没有任何联系,我们再次从 3D 打印机中汲取灵感,并决定通过引入指令文件来将两者完全分离。指令文件只是一系列命令,白板可以不公开执行任何次,而无需计算任何内容。我们确定了一个新的文件扩展名.eaw,并选择了每行的约定,其中包含首先方向,然后选择该方向的步骤数。方向如下: 0 上升, 1 向上和右 (45 度), 2 右, 等等, 高达 7 向上和离开, 8 是笔向上, 9 是笔向下。我们使用的纯文本甚至不接近存储此数据最有效的方法。但是,鉴于我们的时间限制以及额外的计算和存储可以忽略不计,我们选择使用此约定来简化编码。
生成指令文件
生成指令文件是计算密集型任务。首先,必须将要绘制的图像转换为 .ppm 文件,该文件可以在 linux 终端上轻松内接完成(图 H.1 用作示例)。然后运行findEdges.py(见附录 G)提取所有边缘,并将它们放在另一个 .ppm 文件中。此程序立即将图像变为灰度,使数学更简单,而不会丢失很多有用的信息,然后模糊图像以删除任何不是真实边缘的随机点(如图 H.2 所示)。接下来,它执行一个 Canny 变换,从在每个点的颜色渐变开始,即它的变化多少;颜色变化非常快的地方可能是图像中某部分的边缘。如果点满足特定阈值,则将它们标记为边,则将所有边与附近的边进行比较,仅保留具有最高渐变的边(如图 H.3 所示)。我们之前编写的代码,这一切,但我们发现,OpenCV是快得多,所以我们切换到。
一旦我们有一个 .ppm, 只有检测到的边缘, 我们仍然需要跟踪他们像一支笔, 因为我们不只是把一个点在每个像素。这就是instructionGenerator.py(见附录G)的用。这个程序被设计成能够处理复杂的边缘跟踪方法,但我们最终使用的是一个简单的贪婪方法。它扫描图像的边缘点,然后当它找到一个边缘点时,它会选择离其相邻像素最近的下一个点(优先级为角上的边)。找到下一个像素后,它会向指令文件输出一条线,其中包含指向像素的方向和指向像素的距离,擦除图像中仅位于边缘的边缘,并更新其当前位置为新像素的位置。重复此选项,直到图像中不再有边点。
解释指令文件
让白板移动被证明是一项具有挑战性的任务,因为我们必须弄清楚步进电机的哪些引脚一起触发,按什么顺序触发。一个单独的测试文件,现在被弃用,用于试验和错误调整我们的代码到正确的顺序。一旦我们完成了测试,我们就可以编写Movement.py(见附录一),它主要是一个资源文件,其中包含所有方法,您可以调用,使其向给定方向移动。它还包含树莓派 2 运行步进器的设置命令和分析给定方向和步骤数的方法。为了在绘图之前简化测试和校准(即将笔移动到左上角),我们Movement.py给出了一种主要方法,该方法将采取一行命令并进行执行。例如,在 3 1000 Movement.py python3 会将笔向下移动 1000 步。
实际读取指令文件的驱动程序 draw.py(见附录 I)非常简单,因为它只需要在 .eaw 指令文件中读取并Movement.py执行。
讨论
遇到的问题
在工程建设过程中遇到了许多问题。在这些问题中,有五个显然是最主要的。
Etch-A-Whiteboard遇到的第一个严重问题是初始运动系统。起初,链条似乎比皮带更容易选择。然而,当链条被证明太重时,决定改用打火机,最终更好,皮带和滑轮系统。
第二个问题发生在底部车轮上(图 C.9)。最初,Y 轴设计为在顶部和底部的一组车轮上进行平衡。然而,这种设计被证明是迟钝的反应和不平衡在实践中。解决这个问题最简单的解决方案就是简单地拆下底部车轮。这是迄今为止我们能够对问题实施的最简单解决方案。
第三,笔架组件最初有一个致命的缺点:任何试图上下移动它 Y 轴导致它扭矩,有效地锁定它到位。此设计以两种不同的方式进行了修改,包括非绑定 Delrin 板和将旋转中心移近柱线。一旦这些修改完成,笔架移动平稳,响应迅速。
我们的第四个问题发生在去年年底,这种迟到是随之而来的一系列小问题中的一大部分。事实证明,原始步进电机太弱,无法在承受负载时移动皮带和滑轮。为了纠正这个错误,我们只是购买了齿轮步进电机,但大部分的蚀刻板必须迅速重新设计,以适应不同的尺寸。
我们的第五个问题也是新的步进电机的结果,但被证明是我们遇到的最持久和最严重的问题之一。新的,更强大的步进者试图画太多的电流。起初,他们分裂和破裂的电池,引起爆炸的担心。然后,一旦电源被切换,它们大量的电流导致H桥散热器过热过多,导致千分之一变化和树莓派控制逻辑的电压不平衡,导致其崩溃。这些问题通过限制步进器的电流量得到缓解,但散热仍然是一个问题。
更广泛的应用
如介绍所述,该技术的应用范围很广。Etch-A-Whiteboard自动绘图机原型证明,自主艺术辅助的概念不仅可行,而且合理。自动绘图机在教学和原型设计领域具有令人难以置信的积极潜力。将来,我们希望看到更模块化、更坚固、更容易实现的绘图机。有了正确的材料和足够的需求,任何白板可以便宜,轻松地变成先进的,自动化的绘图和绘图机。随着3D打印机数量的增加,相关技术领域的爆炸式增长不会出人意料。
结论
项目以令人满意的功能状态终止。Etch-A-Whiteboard 可精确呈现指令文件,以精确线条跟踪图像的边缘。持续的问题包括散热和逻辑电压差异。展望未来,我们方希望使该项目拥有更坚固的电子系统,也使电源更加便携。
最终评论
蚀刻-A-白板是成功的。它的表现几乎完全按照我们的预期,尽管速度较慢。这个项目取得了罕见的成功,我们要感谢所有成功的人:华盛顿特区先生、贝林先生、贝尔先生、科萨克先生、皮乔内先生、我们的父母和我们的同学。非常感谢您的时间和帮助。
物料清单

项目组件
2X 双极步进电机
1X 树莓派 2 型号 B
2X SparkFun 的双 H 桥电机驱动器
2X L12 Firgelli 技术线性执行器
评论
0 / 100
查看更多
2020-08-27
836

Copyright © 2024 苏州硬禾信息科技有限公司 All Rights Reserved 苏ICP备19040198号