Hackaday.io上的树莓派项目-终结者Wall-e 树莓派/OpenCM9.04/Dynamixel
收藏
分享
脑图
Hackaday.io上的树莓派项目-终结者Wall-e 树莓派/OpenCM9.04/Dynamixel
关于项目
项目描述:终结者 Wall - e 是我的私人助理基于树莓 Pi3 和移动 5 Xl - 320 机器人伺服由机器人。所有机械部件都使用 FlashForge 创建者 PRO 进行3D 打印,我选择使用 XL-320 伺服器,因为它们体积小,能够使用 Robotis openCM 控制器进行链式连接。他们执行非常流畅的动作你可以欣赏我上传的视频。这是 Wall-e 的终结者版本,因为他使用 PiCamera 捕获的视频输入通过 OpenCV 进行处理,并且输出使用终结者样式视图显示。终结者 Wall-e 使用 Python 和 PyGame编程。
项目图片

项目详情
到目前为止,考虑到体内的空间非常狭窄,我想在里面的东西的所有电子产品都相当具有挑战性。使这个项目变得困难的另一个原因是,我不想破坏我的墙-e的方面,这意味着我不喜欢看到任何钻孔从外面可见,也没有可怕的塑料片粘在身上。

当然,也有一些限制,这是相当有限的扭矩量,这些伺服可以承受。我已经 3D 打印所有伺服支持和齿轮使用我全新的 Flashford 创造者 PRO 。

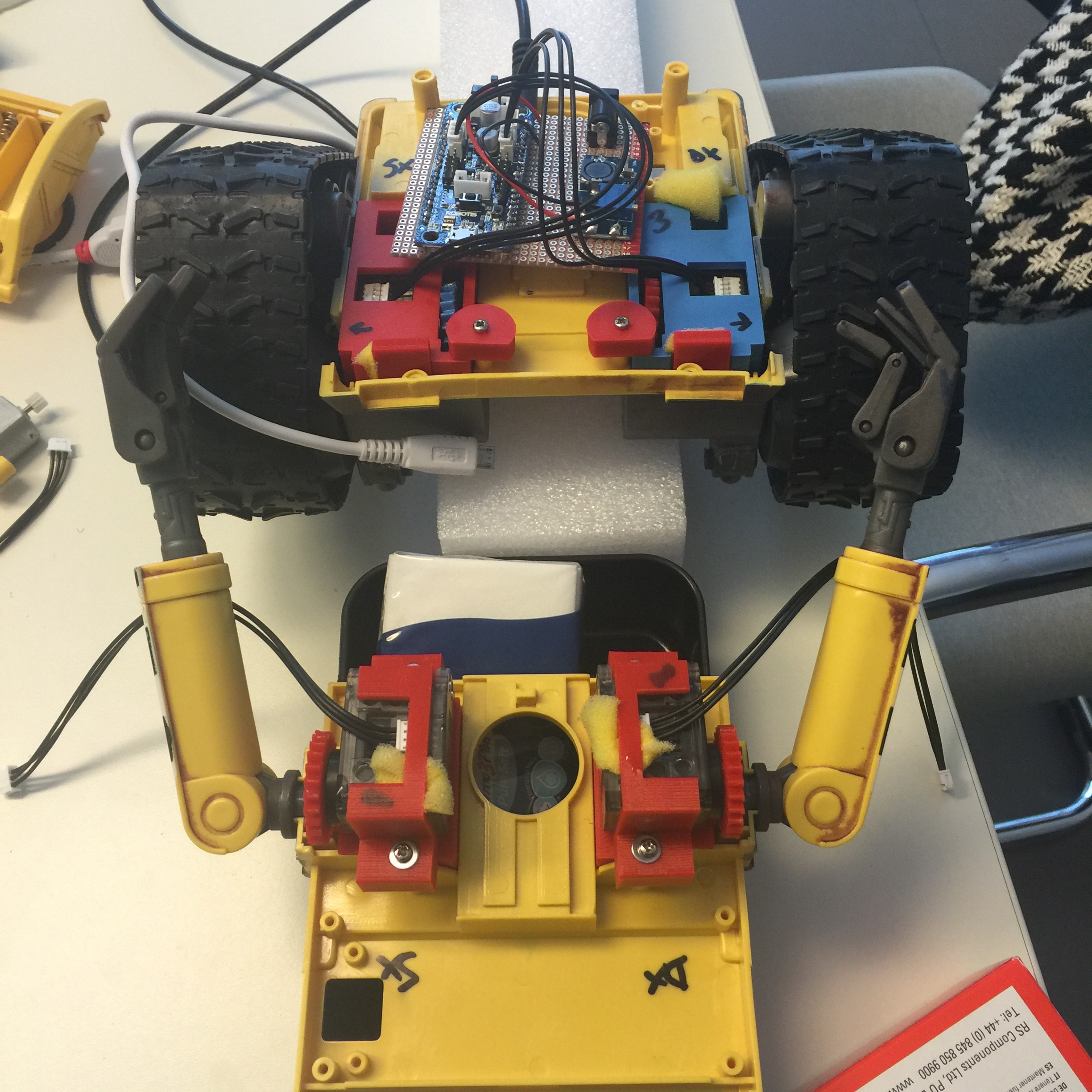
要解决的第一个问题就是在 Wall-e 内布置所有 5 个伺服,以便车轮、手臂和头部的移动。再次 - 不允许可怕的钻探。我几乎满意的结果,我获得,你可以看到下面的图片
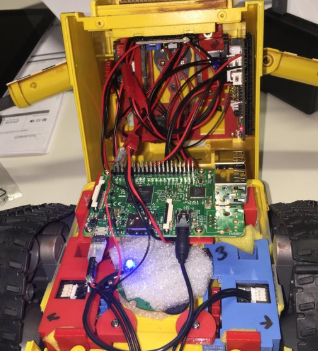
在我把所有的伺服器放在体内后, 我不得不为以下电子产品找到空间
音频板
- 打开CM 9.04(伺服控制器)
- 从 5V 到 7.4V 的步进(伺服需要 7.4V)
- 树莓派3
这是我的墙内与所有的电子产品里面(但仍然缺少,HDMI电缆,相机灵活,声纳布线)

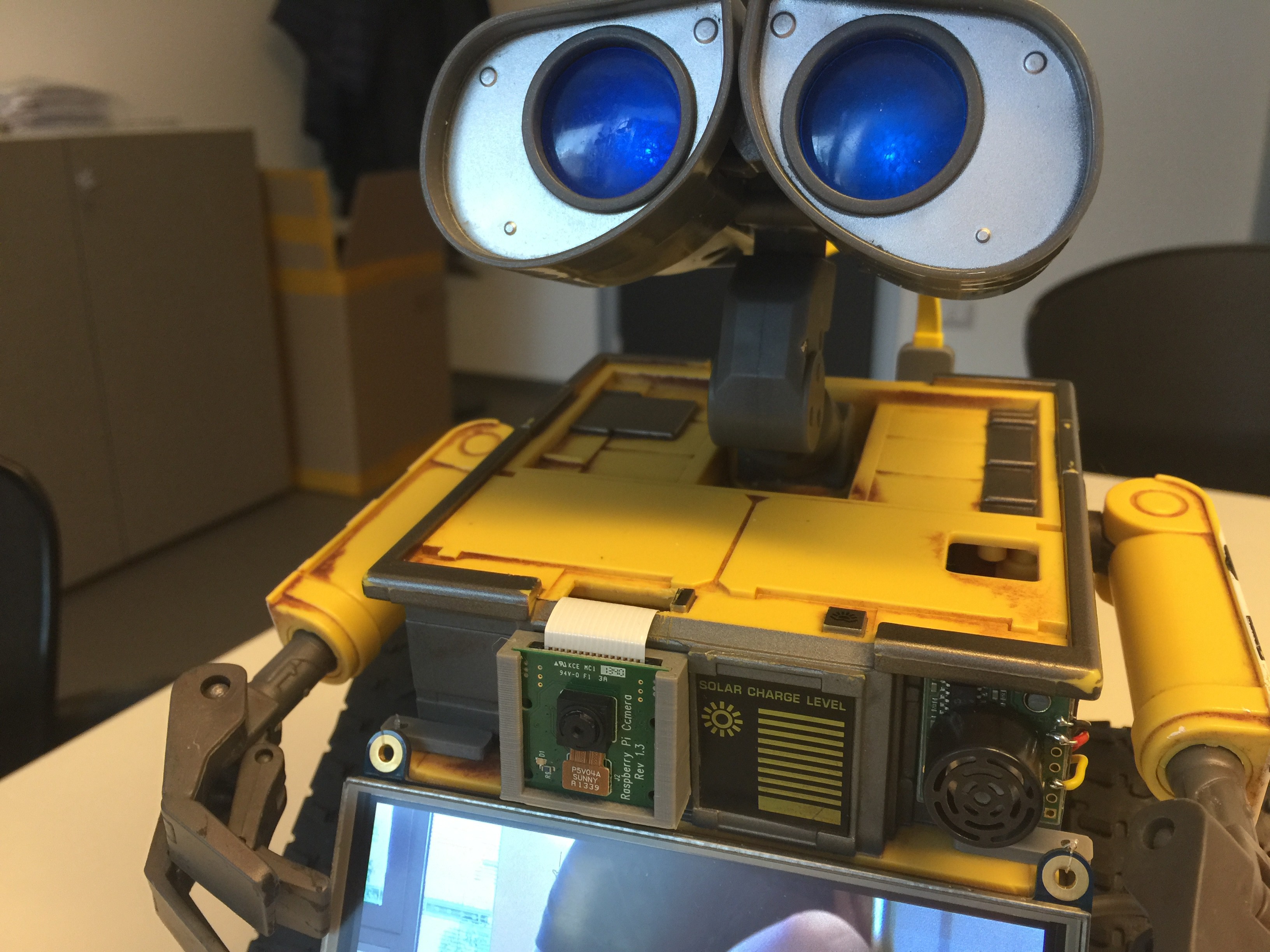
最后一个挑战是将 HDMI 显示屏与 PiCamera 一起布线在机器人前面。我使用 5" Hdmi 触摸由 Adafruit 和 I 3D 打印显示支持使用灰色, 已经存在于一些其他部分的 Wall - e 身体

PiCamera 和声纳已放置在显示屏的顶部。我看到其他黑客把相机放在 Wall - e 的眼睛里, 但我不喜欢最终结果的动因, 因为我想保持两只眼睛的光线
Wall-e 目前背包装有 9000mAh 电池,在打开所有设备时提供 5 小时的足够电量(请注意漂亮的黄丝带电缆:)我将很快重印电池支持 - 这只是一个原型。

需要付出一些努力来安装机身内部的 HDMI(和 USB 电源)电缆(很难找到纤细的柔性电缆)。此外, 我不得不把一切的方式, 不会干扰伺服时刻

项目文件
评论
0 / 100
查看更多
2020-08-27
834

Copyright © 2024 苏州硬禾信息科技有限公司 All Rights Reserved 苏ICP备19040198号