Hackaday.io上的树莓派项目-Fly Wars:黑客解决世界饥饿问题的方法
收藏
分享
脑图
Hackaday.io上的树莓派项目-Fly Wars:黑客解决世界饥饿问题的方法
关于项目
项目描述:将张贴在那里黑客解决方案的世界饥饿,黑客将如何解决这个问题。一组详细的教程,详细说明了如何建立一个自我营养来源的水瓶座单位,并充分利用传统的食品输入使用计算机控制。学习如何从你父亲那里耕种,就像和祖父一样,它不再会减少,世界正在改变,需求在增加,方法也保持不变。成为变革的一部分。这个项目就是把技术带到农业和粮食生产的世界。带来真正的技术飞跃
项目图片

项目组件
1X 树莓派
1X Arduino
1X USB 摄像机
1X 继电器
1X 919D 电机 [50:1]
关于我: 毕业于机械工程学位和电气工程硕士学位, 目前正在完成我的空档年, 并花一些时间设计一个自动化温室和小型分配类型的花园, 提供为期一年的无忧无虑的食品供应和测试床, 为新颖的营养来源水波尼奇种植系统。
直到21岁,我会认为自己是一个电脑菲比,用我的笔记本电脑主要作为咖啡哑光,然后我看到一个导师飞行四轴飞行器,并迷上了!在导师(兰开斯特大学的鲍勃·麦金)的很多帮助下,我克服了恐惧症,五年后,我自动化并优化了农场和房屋上许多耗时的工作,把我的专业领域从机械工程转向控制系统工程[它更有趣]。
喂鱼是一项非常耗时的任务,每天需要熟练的操作员多次访问站点,并且容易出现人为错误或实施低效的喂养程序以节省时间。计算机可以日复一日地执行这项任务,无需人工交互,从而节省时间、食物和大幅提高系统的产量。
如果潜在的好处这么好,那么为什么没有人已经这样做呢?我只能给你我的看法。喂鱼的任务很复杂,许多变量和环境因素影响鱼类的喂养(见下文),养鱼是一个相当枯燥的话题。
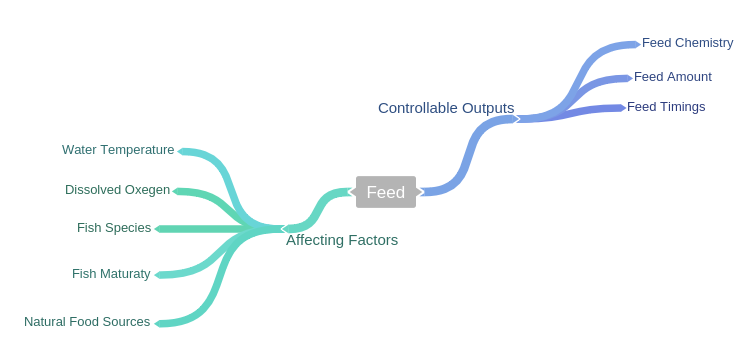
正如您从上面的图表中可以看到的,变量很多,有时很难衡量。幸运的是,其中很多都可以定义/测量和表示数学。
进给间距/时间:喂鱼之间的最佳时间取决于鱼的胃的大小,当他们年轻时,他们需要定期喂养,随着它们变大而减少。
进给量:每天喂鱼的体重百分比受水温和鱼的年龄影响。这些是开环控制器所需的输入。基于视觉的反馈不需要知道这一点,它会使用食物的消费率来模仿熟练的人类喂食者。
饲料化学:你喂鱼的蛋白质百分比与鱼的年龄和水的温度有关。
注意 DO :溶解氧测量费用昂贵,测量探头需要不断校准,因此我们将假设池塘有足够的氧合用于生长的鱼。将饲料在一天中传播也会将 DO 的需求分散到一天。因此,简言之,每天多次进食会降低系统溶解氧的峰值需求。
当今世界有很多人挨饿,这可以通过技术的应用来减少。许多粮食短缺的主要地区有大量的阳光和令人惊讶的井水(甚至撒哈拉沙漠)的丰盛,限制因素是贫乏的养源和土壤。嗯, 我已经和水瓶一起成长很多年了, 问题解决了吗?
也许不是,在水族中,喂鱼的食物对于一个靠每天靠两美元生存的人来说相对昂贵。我们还能用什么作为营养来源,而不是鱼食,人类尿将是一个很好的来源[它的自由,容易获得]。这是可能的, 也许被认为是恶心的西方, 但如果你饿了, 你对恶心的定义变化相当快。
使用尿液的问题是,一个人永远不会输出比他吃更多的营养,所以我们真的只是减少营养循环浪费,没有真正的投入。这是一个很好的开始,但我们需要添加到这个解决方案。什么是丰富和自由的营养来源?[后来的博客将覆盖这一点]
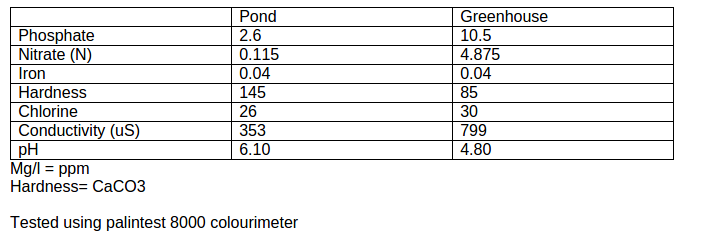
我无法进行全谱人体尿液测试的概念证明,缺乏一个体面的标准,我也可以比较,但这里有一些基本测量相比,一个自然健康的池塘:
这个博客是关于制作一个营养量给水培系统是即插即用, 我不太得到它到这个版本的即插即用的完整阶段。但它几乎在那里。由于我们系统的营养强度的变化可以建模为一个线性系统,在营养输送方面,应该可以实现一个基于系统模型的非常简单的自我调谐控制系统。为什么选择自学系统:
适用于泵磨损
适应营养源强度的变化
即插即用,适用于各种系统
处理交付与稳定读数之间的滞后没有问题
我制作了这个控制系统,尿液作为营养来源,因为尿液的浓度可能不同,我们需要一个系统,可以考虑到这一点。传统的PID控制器将挣扎在这里[或至少我会难以实现一个很好的],因为输入和输出测量之间的较大滞后,由于在系统中的营养物质混合[坦克混合[生长床填充[排水时间]。它也将工作为传统的液体增化剂。
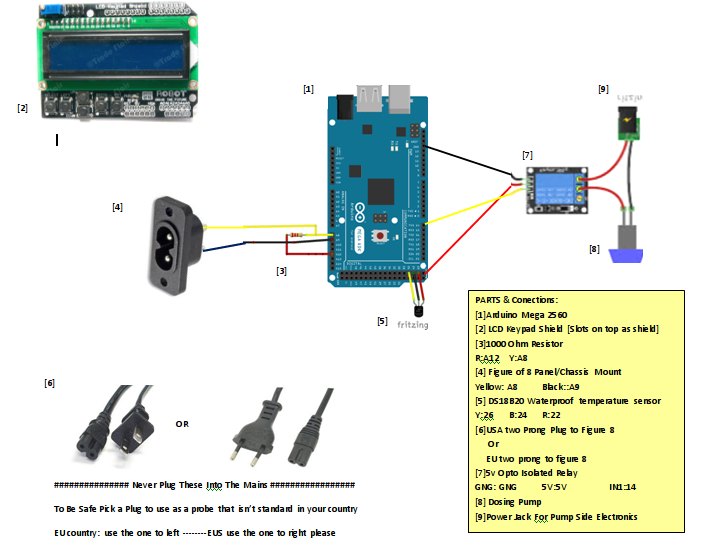
引脚输出:
三美元 EC PPM 仪表的更新代码为 MCU [Arduino]
此代码是上一个代码的轻微更新,已更新:
更好的正常运行时间计数器
LCD 护盾
新引脚出图
重新启动受保护的校准详细信息
欧盟及美国插头校准探头
此外,快速更新代码,使校准值在断电后,我们将单元常数 K [一个浮子] 存储到 EEPROM 中作为缩放 int,因此重新启动后的值可能会略有变化 [但很小,它不会产生太大的影响]。
单元格常量
我建议校准您的探针,但如果目前这不是一个选项,以下单元格常数 [K] 将给出一个很好的估计读出:
欧盟插头: K = 1.76
美国插头 K= 2.88
校准
如果它需要说明操作有人设计错了, lcd 应该解释自己给你在启动。如果你仍然卡住观看 YouTube 视频, 看看我如何校准它。
校准与EC约50%的最大预期读数,以获得最佳效果。
新引脚:

步骤 1
选择要构建的喂食器类型 [如果您有一个巨大的湖泊,请选择喂食器
步骤 2
选择要构建的控制系统类型:
-视觉适用于使用浮动食物小于 20mx20m 的清晰定义的池塘
-温度适用于任何大小池塘与任何类型的食物
步骤 3
计算进纸器的进给速率
步骤 4
将详细信息输入控制器 [目前通过 usb 和计算机]
并运行一些板凳顶部测试, 以检查它的工作原理, 如预期的那样
步骤 5
放置位置并使用拨号来微调
步骤 6
考虑向控制器添加额外的功能,更好的时间进给周期,读取水 ppm。它的所有开源, 所以你可以添加到这个任何你喜欢的。
相关列表
评论
0 / 100
查看更多
2020-08-27
716

Copyright © 2023 苏州硬禾信息科技有限公司 All Rights Reserved 苏ICP备19040198号