Hackaday.io上的树莓派项目-R.Ian,简单易用的教育机器人
收藏
分享
脑图
Hackaday.io上的树莓派项目-R.Ian,简单易用的教育机器人
关于项目
项目描述:R.Ian 是以著名的 Linux 发行版 Debian 的创始人伊恩·默多克的名字命名的。这个机器人是简单的构建,组装和开始编程。这意味着,在没有时间,一个人应该能够建立机器人,并编程它运行简单的障碍避免障碍。但是,我想设计它,以便它可以升级,如果用户想要,也可以(即使没有升级)运行更先进的算法。目标是有一个相对便宜的教育机器人,学习的人可以由她/自己组装,以便更好地了解它是如何工作的(但也可以使用完全组装,如果他/她只想专注于编程),并很容易编程,即使很少或没有编程经验。它用于学习编程。
项目详情
这个机器人意味着便宜(小于50美元),简单构建(3D打印大部分),易于组装(只是拧的东西在一起),易于编程(使用Arduino开始),易于改进(固定点是所有在机箱添加的东西),易于修改(一切都是开源的,所有的原理图都可用,并提供免费开源软件,可在linux上可用的开放格式、窗口和 mac)。
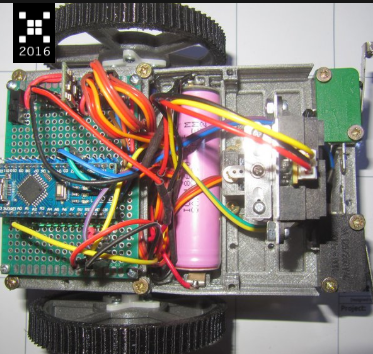
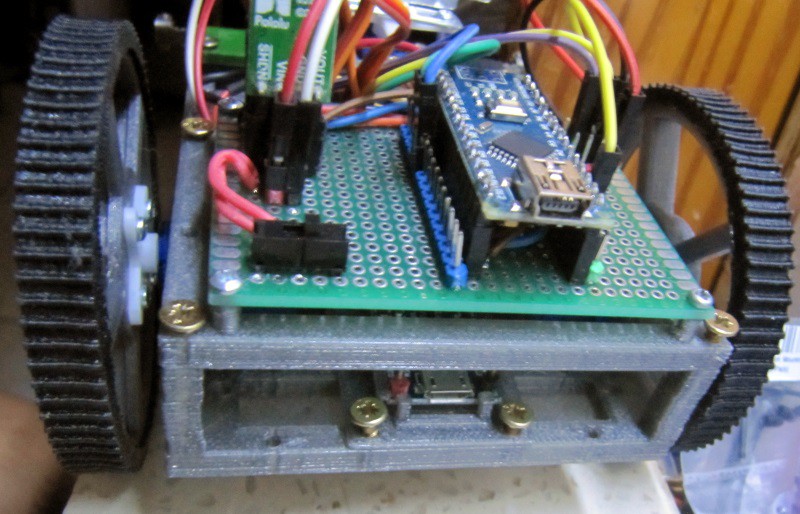
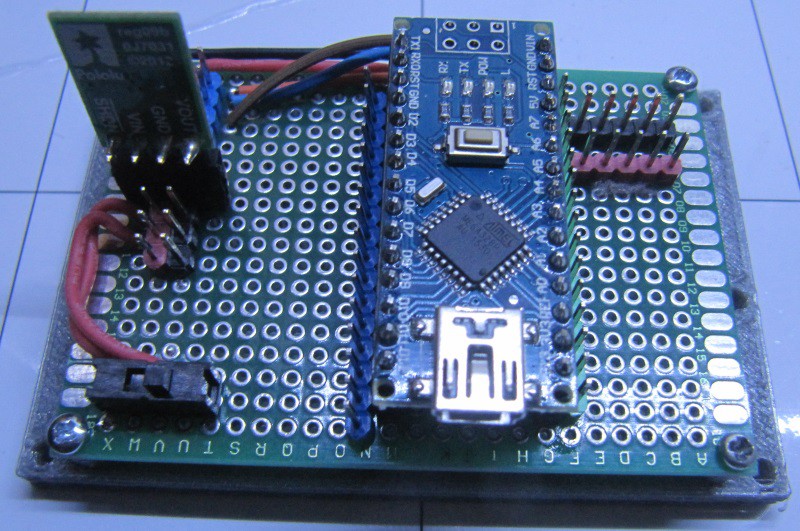
机器人的底座是 Arduino nano,控制两个连续旋转伺服电机进行运动,以及几个接触开关、第三个伺服器和红外测距仪。这使得机器人能够简单的避障程序。这是最便宜的机器人版本。但是,可以添加第二阶段,使用树莓派零和 wifi usb 密钥。pi 和 Arduino 通过串行与逻辑级转换互连。
在此配置中,Arduino 被编程为应答串行命令。可以要求它做一些事情(移动、转动传感器等)或返回信息(传感器值、电池电量等)。然后树莓派零通过一个小库通过串行发送命令,机器人可以通过 wifi 在空中编程。
如果机器人是孤独的,它创建一个热点用于编程它。如果检测到另一个机器人热点,其他机器人将尝试连接到它,允许协作工作。我计划制作一个小型基站生成第一个热点,并包含 wiki、文档、源代码等。
与Raspi和wifi键,我们仍然低于50美元:
35-40美元的基础机器人;
5$ pi 零;
2$ usb 密钥;
1$ 微型 usb-usb 转换器;
3 美元微型 SD 卡。
项目图片
功能和特性(Markdown备注)
外部连接方式(图片)
制作流程
注意事项
2 X 带杠杆的微动开关
2 X 脚 F90R
1 X 9g 塑料齿轮伺服电机
1 X 18650 锂电池
1 X 马鲁卢 5v 加强调节器
1 X 锐红外测距仪
1 X 用于焊接的公头
1 X 杜邦电线地段
1 X 摇杆开关
1 X 机箱(3D 打印)
1 X 电子板(3D打印)
1 X 伺服支架(3D 打印)
2 X 车轮(3D 打印)
2 X 轮胎
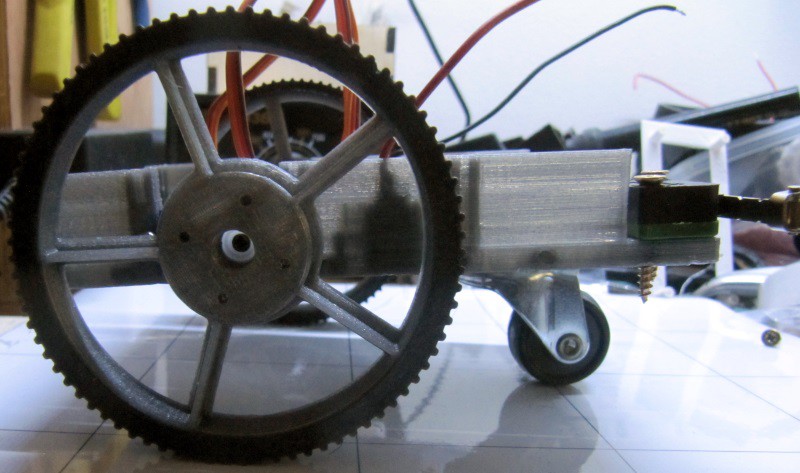
对于这个项目,我不得不开发车轮和轮胎的3D打印。我想走得更远,使轨道,增加如何可配置的一切,使一切更清洁,更模块化,更功能。
因此,我决定创建项目OpenWheel,即开源的这个,并扩展到超出原始项目的范围。最后,我会用这些轮子而不是旧轮子来生成一个新的底盘。
虽然这意味着这个机器人没有直接的进展,但它宣布了即将到来的进化。对于R.Ian来说,这将是一个强有力的演变。
在下一次迭代中,它将更加模块化,这意味着您将能够以更简单的方式更改机器人的配置(我的意思是,打印机箱,并决定所需的任何配置,打印相应的部件,并把它们放置到位。当您想要更改时,请删除该部件,并将其替换为变体)。
我们还将解决R.Ian目前遇到的主要问题(主要问题是由于伺服轴的轴是脆弱的,所以车轮的脆弱)。
这也可能导致项目成本的轻微增加(更多的3D打印做),但我想提供一个强大的基础,使其功能齐全,和孩子抵抗第一。从那里,我们将努力降低成本。
树莓派会去哪里?为此,有两种解决方案:在电子,或在它下面。
如果过去,我们将不得不为机器人做另一个阶段。它会导致它再打印一件,但它使得以后升级更加容易。构建基本机器人,如果您想要,则添加另一层额外的东西。
第二个解决方案是让电子板下。在这种情况下,我会使用 2*20 连接器,这样电子板将直接插入 pi,这将进入其当前位置。有利的一面是,连接两个板很容易。这是我为R.Hasika选择的解决方案,因为这个另一个机器人在所有情况下都有一个Raspi。在这里,raspi是选项,所以我们必须找出这个解决方案。
此外,我们希望尽可能降低成本,因此我们选择 Pi Zero 作为主要解决方案,因此我们可以考虑优化空间,同时保持轻松的维护、黑客攻击和配置。
在所有情况下,我计划使有可能使用每个型号的树莓派外形(B+/2/3,A+,零),所以两个或三个托盘模型。
我认为 pi 零和 A+ 对于这个机器人来说最有意义 (低功耗和更便宜), 但我想为用户提供选项。无论如何,我会从零托盘开始,然后是 A+,然后以 B+ 格式结束。
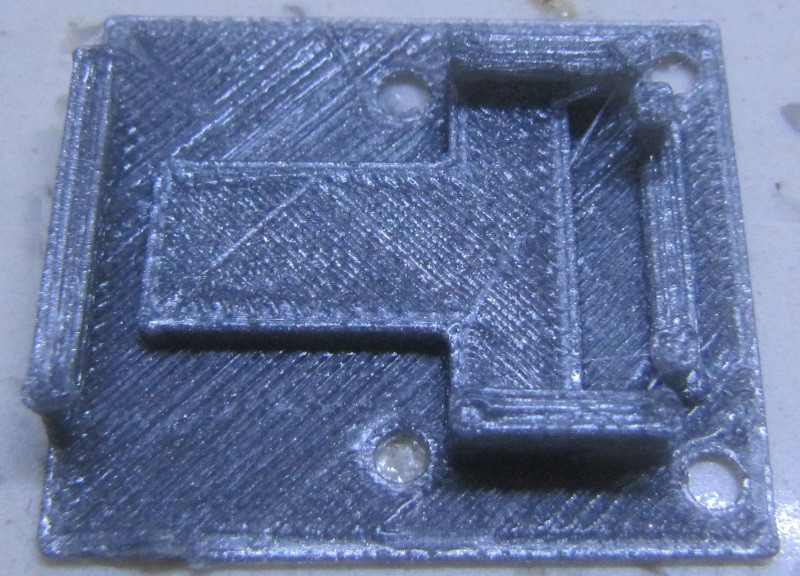
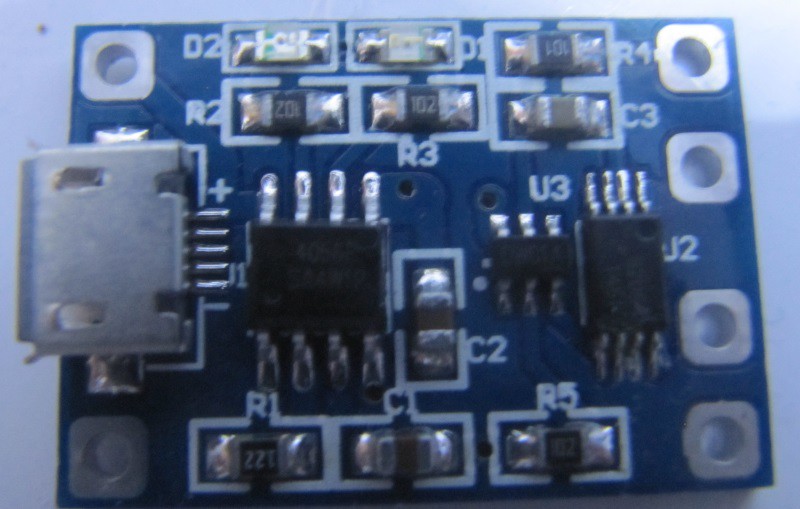
我为此机器人做了一个新的部件,以容纳上一个日志TP4056中显示的脂带充电器板。它有爪子固定板到位,不像以前的版本,只是一个平的零件与螺丝孔,并使用双面胶带,以确保它。
这里是它看起来像当我打印在我的 meh质量灰色Pla (足够好的结构的东西, 但打印丑陋) :
你滑动板的地方使用一点点的力量,小心不要打破爪子(我打破了一个,我将不得不改善设计):
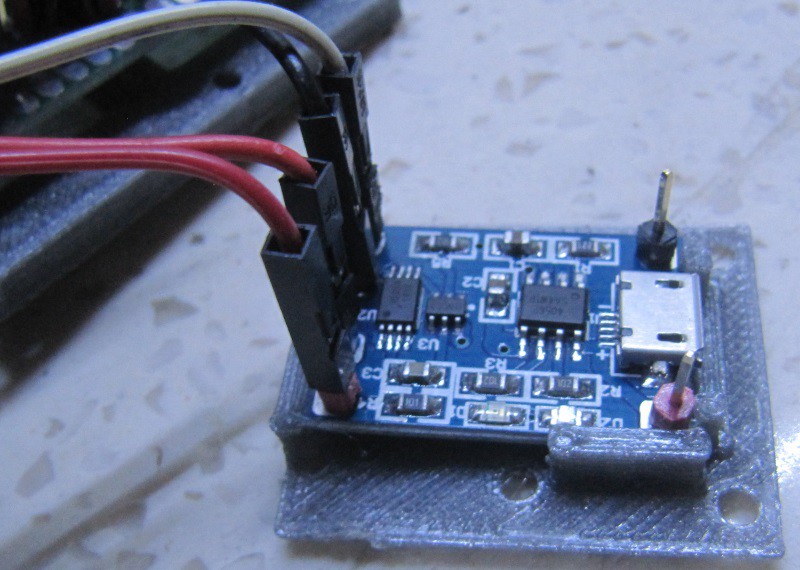
然后,您可以使用四个 3mm 螺钉将它固定到位,USB 端口朝向机器人的背面:
然后,您可以再次固定电子板:
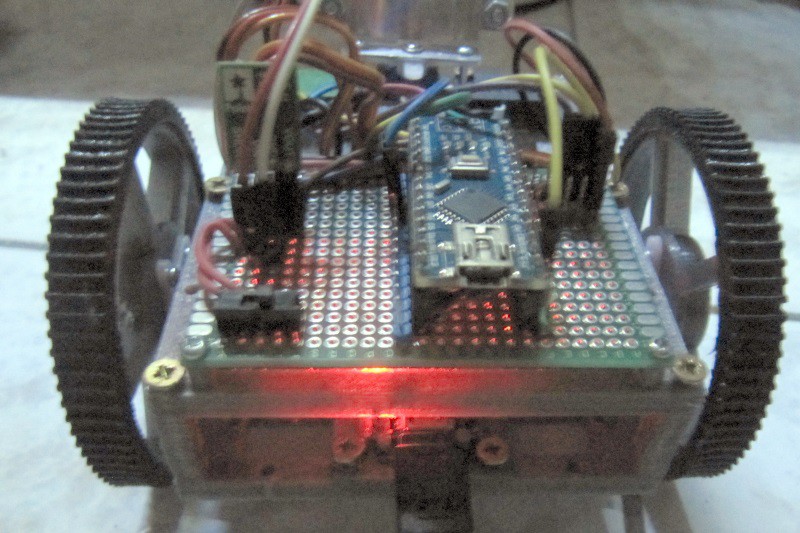
USB 端口可访问,一旦插入电源,它开始为电池充电,并带上红色 LED:
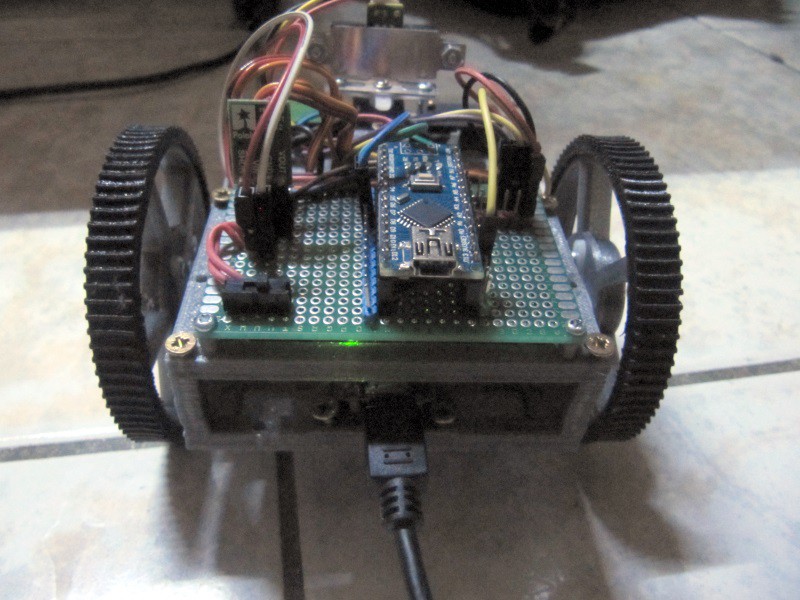
在充电结束时,带电变为绿色:
也不太显眼。无论如何,有输入引脚,如果需要提供5V的另一个平均比USB端口(太阳能电池板,充电站等)。
现在,机器人可以方便地使用,而无需拆卸任何充电。
为了使机器人尽可能无忧无虑,我希望它充电,而无需取出电池。
我用马鲁 zumo 机器人教计算机科学, 那些有 4 个 Nimh 电池。我使用的单个脂质电池不仅提供大致相同的能量,质量的一半和更低的价格,但LiPo充电简单,因此大量的廉价LiPo充电板。我选择的不是最便宜的,但仍然是一个便宜的板,在不到1.5美元一块,与过度放电保护
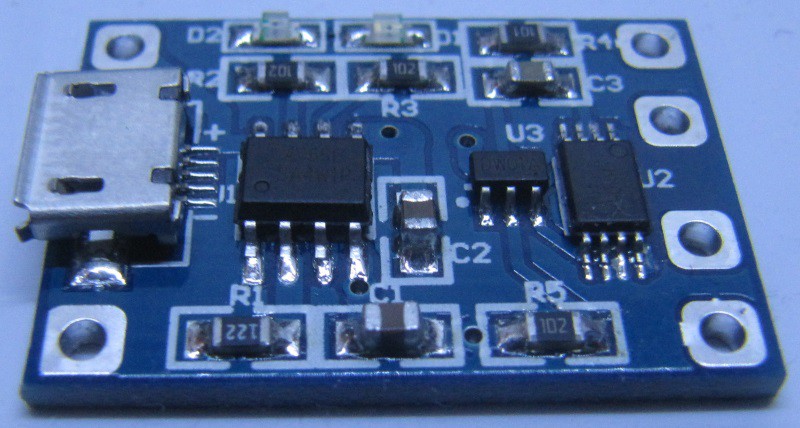
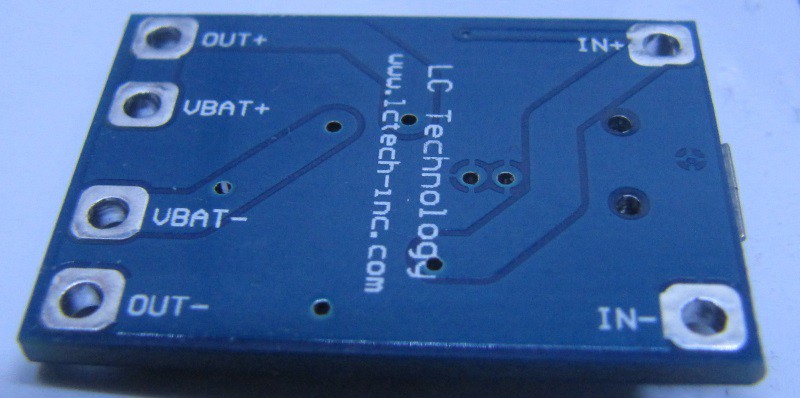
电路的变化,以添加这个板很简单:电池线去充电器,和出 + 和 - 去电池电线以前去的地方。
因此,没有修改电路板(这就是计划)。此电路板位于机箱底部的电子板下。房间已经规划,固定孔可用。然而,我将不得不设计一个小板与爪子,以举行充电器,并相应的螺丝孔,以固定到机箱。
如果一个机器人的一个版本想要多个电池,则无需增加充电时间,即可在输出引脚上添加多个充电器和二极管。更多关于R.Hasika项目,它有4个锂电池并行。
无论如何,它也有输入垫,所以很容易添加桶插孔,为什么不是一个5v调节器,使机器人可以充电与各种电源砖与更广泛的电压范围。这不是我要包括在默认机器人(以降低成本),但肯定是一个选项或模组,可以做到。
下面是板底的外观:
输入垫的另一个用途可能是在机器人上安装某种焊盘,以便它能够自己进入充电站。我会设计这样一个站,并在以后的工作。
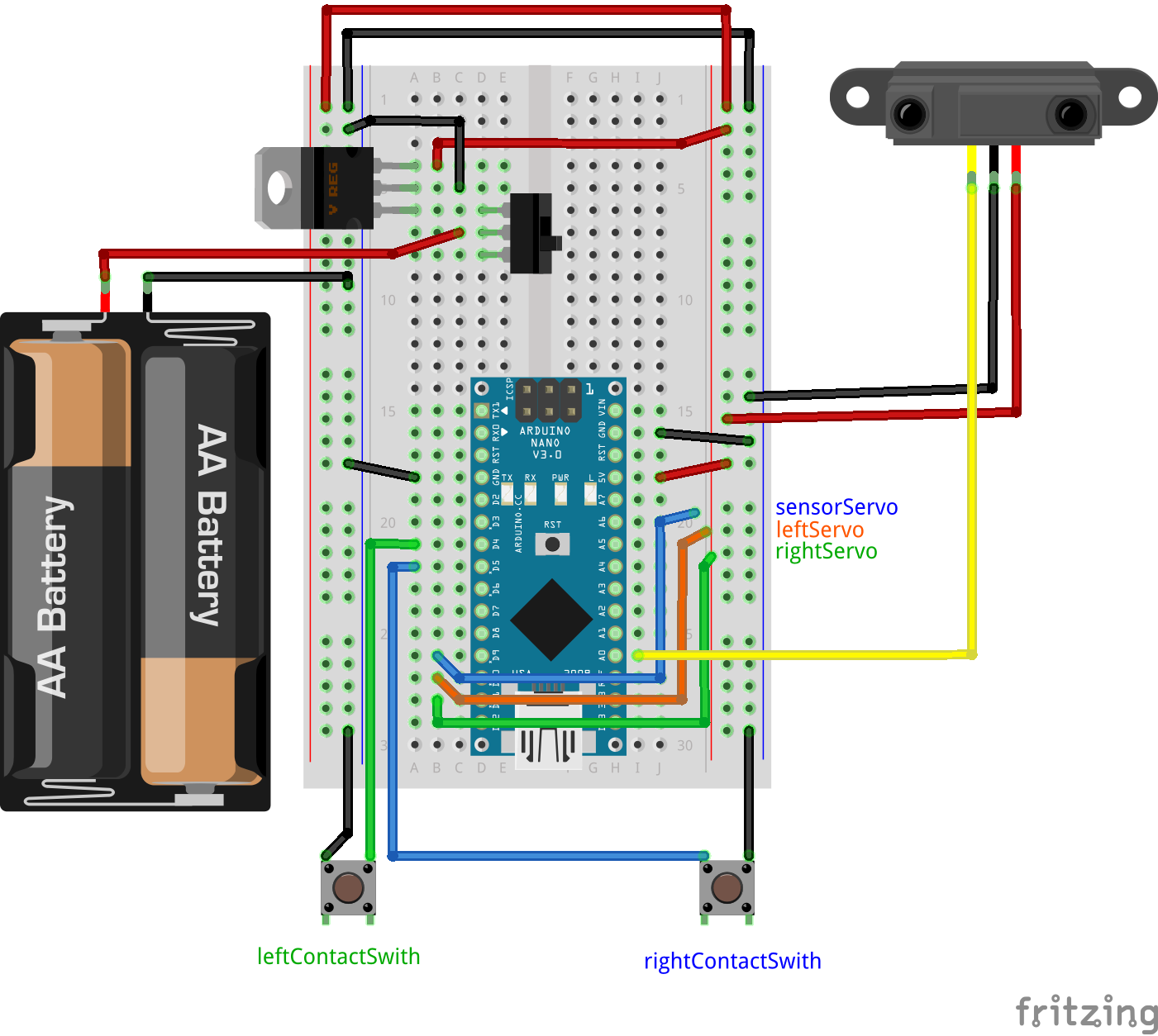
如果你不想要或不能焊接电子板,我已经做了半尺寸面包板版本的示意图:
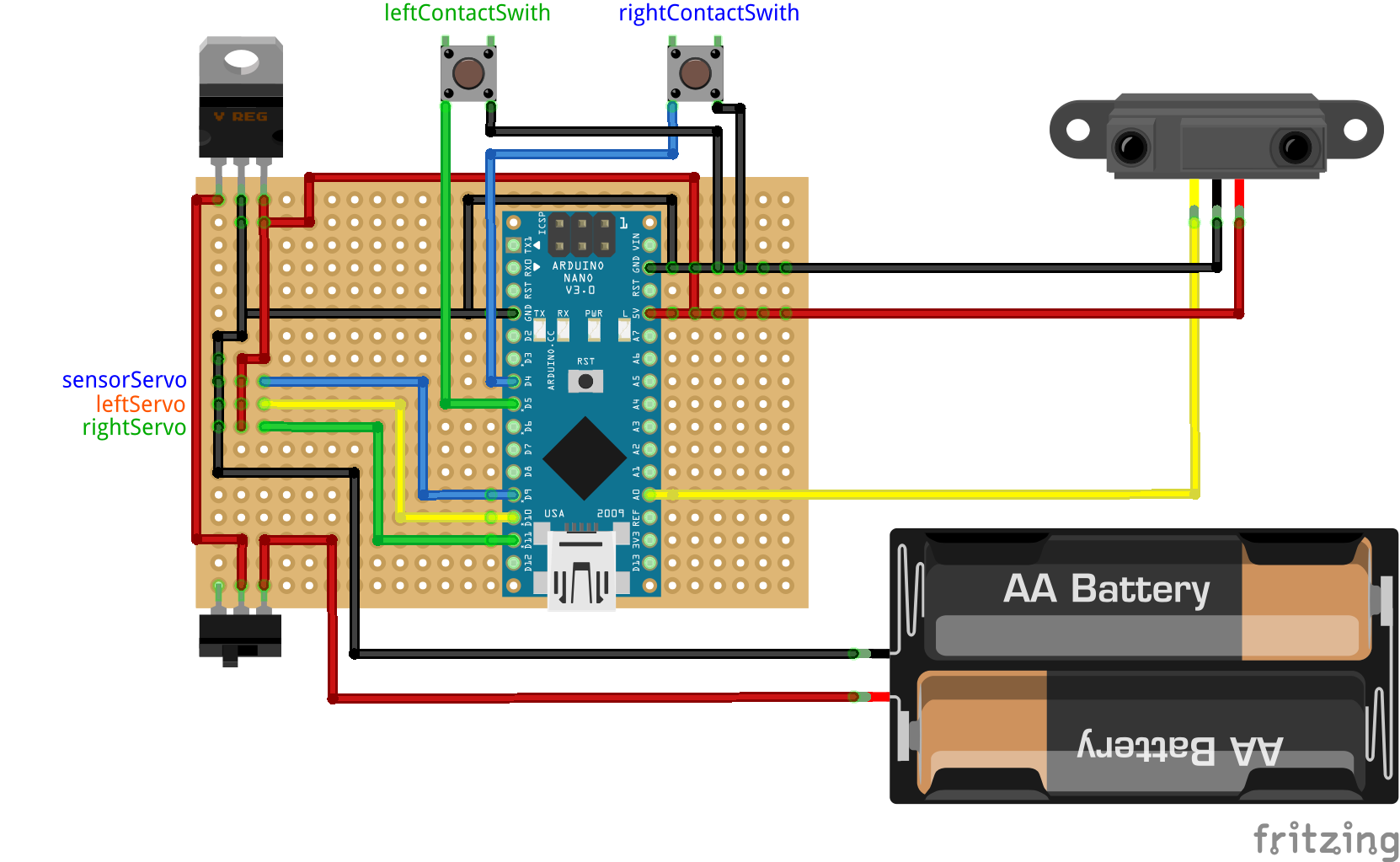
这里是我用于第一个版本的电路板的示意图:
在做一个适当的教程,这个主题之前,我将在这里介绍R.Ian的组装。
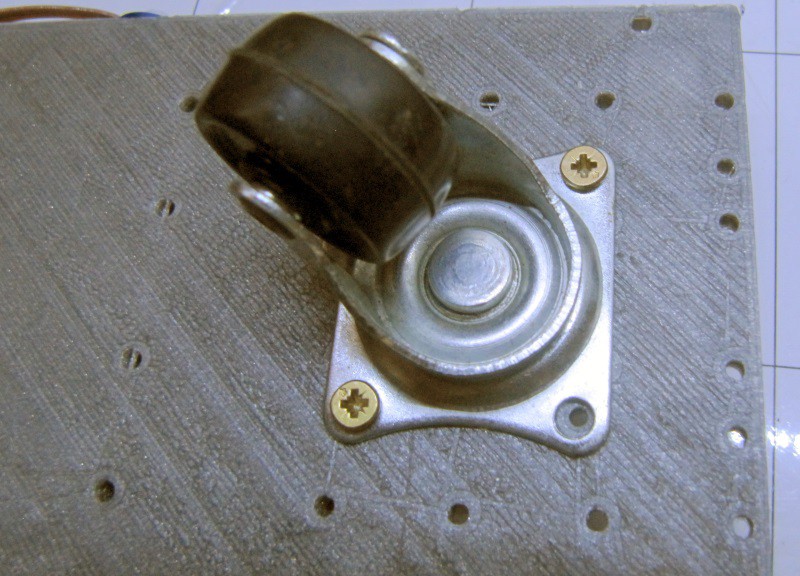
首先,我们使用 4 个螺钉在机箱上安装自由轮:
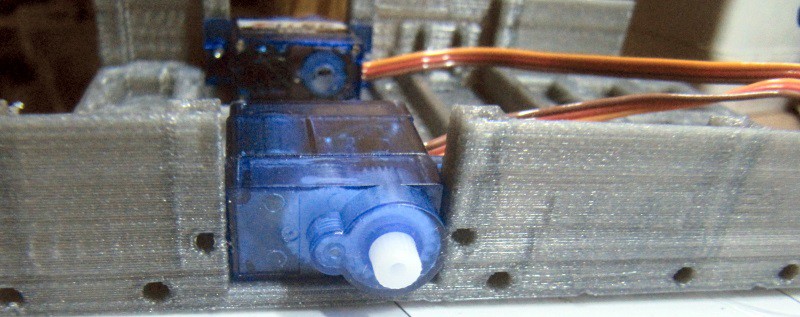
接下来,我们将安装前传感器伺服(这是可选的),为此,我们将伺服器放在伺服支架中并固定到位。然后,我们将支架固定到机箱:

我选择将伺服轴朝向中间而不是朝前,这样传感器在机器人的前面不会太多(为了保护它,红外传感器具有最小范围,通常为 10 厘米)。然后,我们可以使用支架将传感器固定到传感器上:
安装传感器时,尽量使支架靠近 90° 角(或伺服最大旋转的一半),以便其轻松居中。在这种情况下,传感器是一个锋利的红外测距仪
之后,另一个可选阶段是将触点开关固定在前面。它只是用螺丝完成。这些传感器连接到一个引脚的接地,以及另一个引脚的上拉模式下的 GPIO。
将电机放置到位
在固定电机到位之前,应对其进行校准,使中性点处于 90° 角(因此不可移动)。为此,将它们连接到 Arduino,然后将位置设置为 90°,然后调整小螺钉,直到它们静止。
完成后,伺服器可以固定到位:
机箱上的孔应与伺服耳正确对齐,只需 4 个螺钉来固定两个电机。
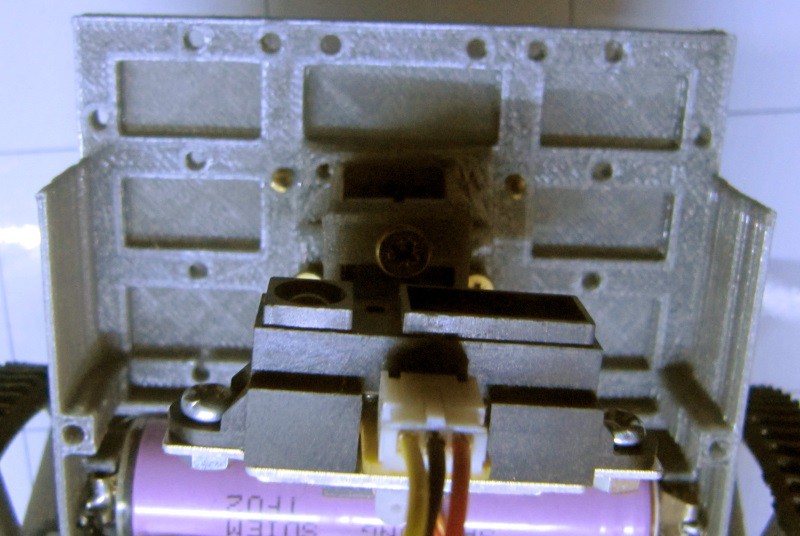
此时,必须安装电池,但在安装之前,必须安装电池卡舌。为此,请按照 R.Hasika 关于此主题的详细说明操作(这些说明也有图片)。然后电池应该留在原位后,施加一点力量,得到它的插槽。
电池的 + 转到电压调节器的 Vin, - 转到接地。开关是一个好主意,能够关闭机器人。
然后,缺少的只是电子板。为了安装它,必须使用 M2 螺钉将其固定在电子板上:
然后,我们使用 3mm 螺钉固定机箱上的电子板,USB 端口在后面发出蜂鸣。
我们还使用伺服提供的小螺钉将车轮拧到位:
将电缆连接到位后,一切准备就绪:
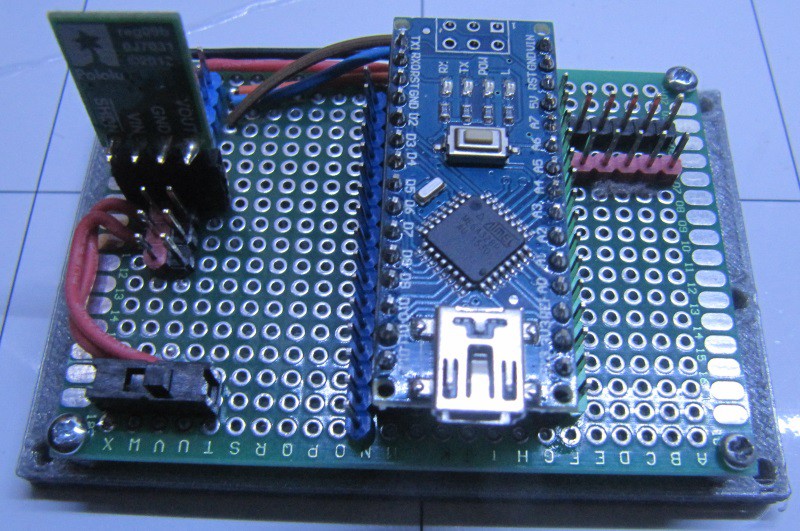
现在,使用USB可以正确编程机器人。我稍后将登录电子板并布线。
打印之前部件后,缺少的就是将电子设备固定到机箱的方法。为此,我设计了这部分印刷在PLA,ABS,尼龙或类似材料。
它通过 3mm 螺钉拧到机箱上,主板用 4 m2 螺钉拧到机箱上。
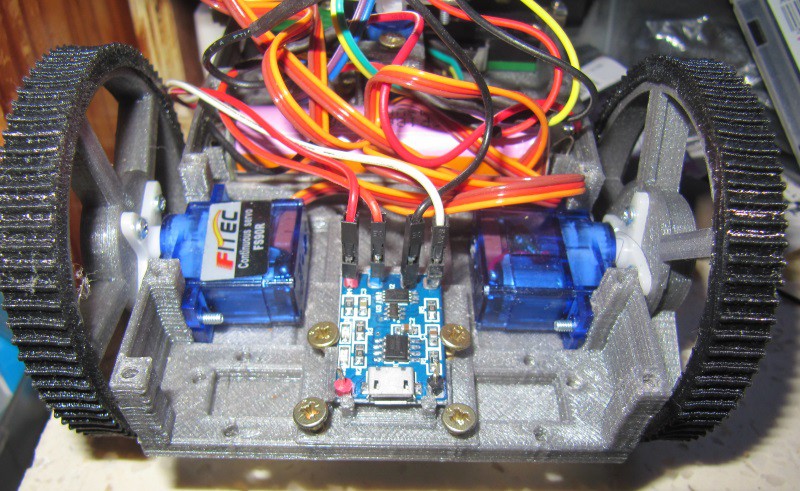
以下是打印时的外观:

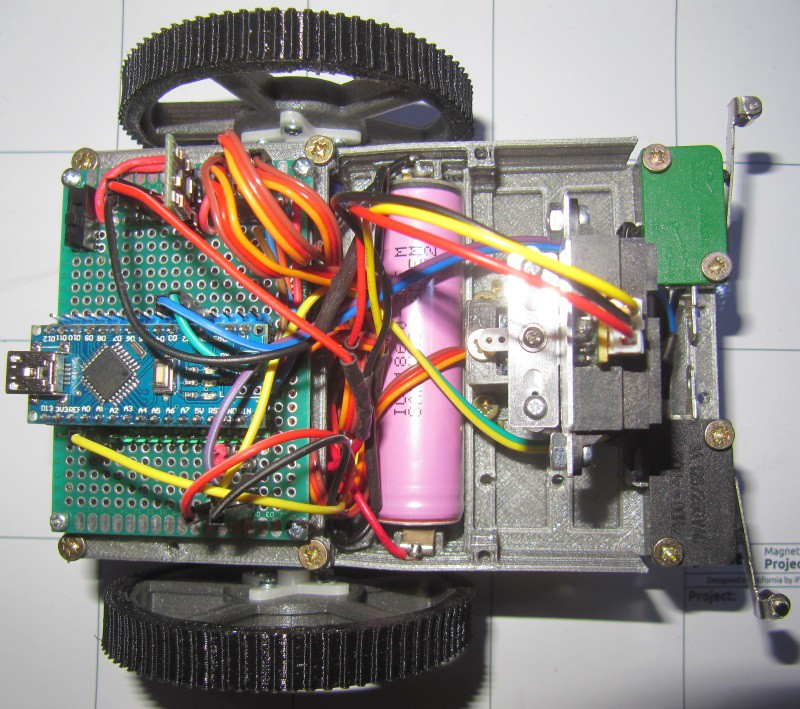
这里没有什么太花哨的,但有了这部分,我们可以组装一个功能齐全的机器人。以下是安装电子元件的结果:
评论
0 / 100
查看更多
2020-08-21
837

Copyright © 2024 苏州硬禾信息科技有限公司 All Rights Reserved 苏ICP备19040198号