Hackaday.io上的树莓派项目-YARRM - 7-DOF 低成本机器人臂
收藏
分享
脑图
Hackaday.io上的树莓派项目-YARRM - 7-DOF 低成本机器人臂
关于项目
项目描述:这是一个类似于巴雷特 WAM 的机器人手臂(基于差分)。然而,我的机械臂在所有臂关节都有差分。因此,臂可以配置为 4、5、6 或 7 DOF 机械臂(具体取决于电机的驱动方式)。底座旋转,这是轴之一,后跟 3 对差速器。
项目图片


开始组装新的重新设计的机械臂!
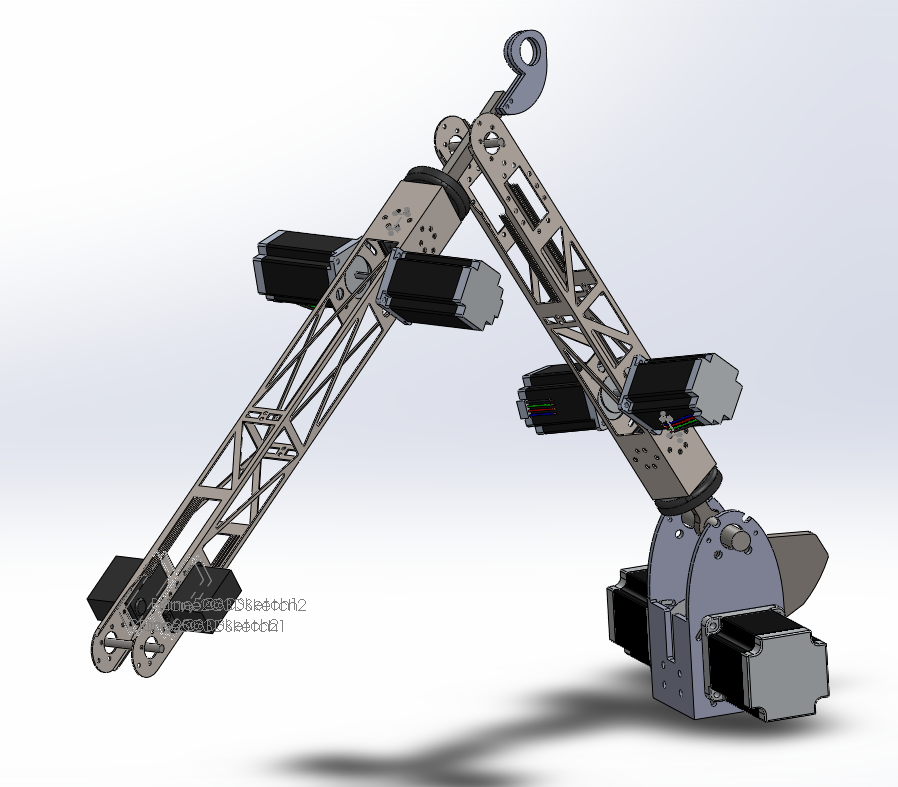
构建了前两次迭代后,我意识到我需要更好的基础设计。我不满意的精度或刚度16ga钢折叠在90度,所以我已经决定移动电机永恒的手臂结构,这最终使它相当紧凑。它也有点类似于波士顿动力 "迷你猎豹" / 电动迷你狗手臂现在使用的设计。
在这里,电机仍然是NEMA34齿轮+4:1或5:1到20mm轴。
我保留了原来的可调基张力器:
现在也把它们加到项目里:
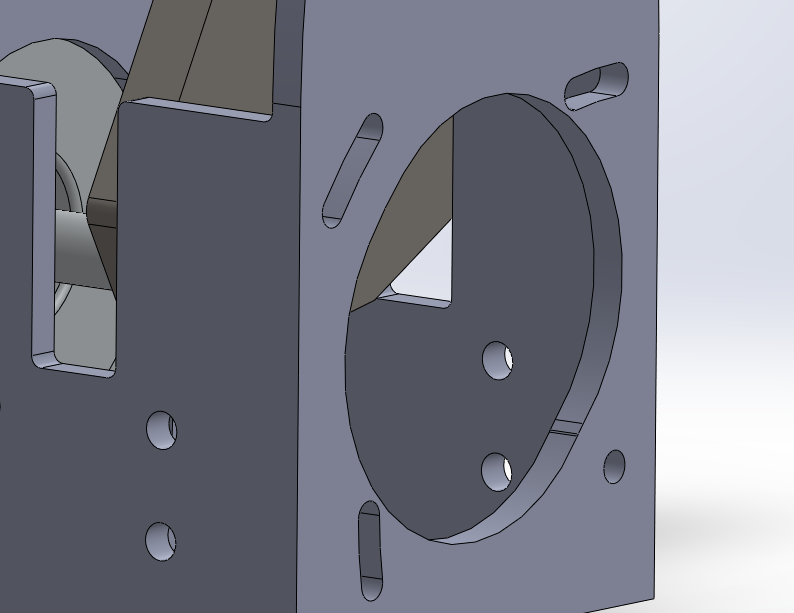
在这里,您还可以看到我为装配所做的修改之一 - 电机安装在对角线上(小孔 + 插槽)。较大的孔是能够组装相反的电机。
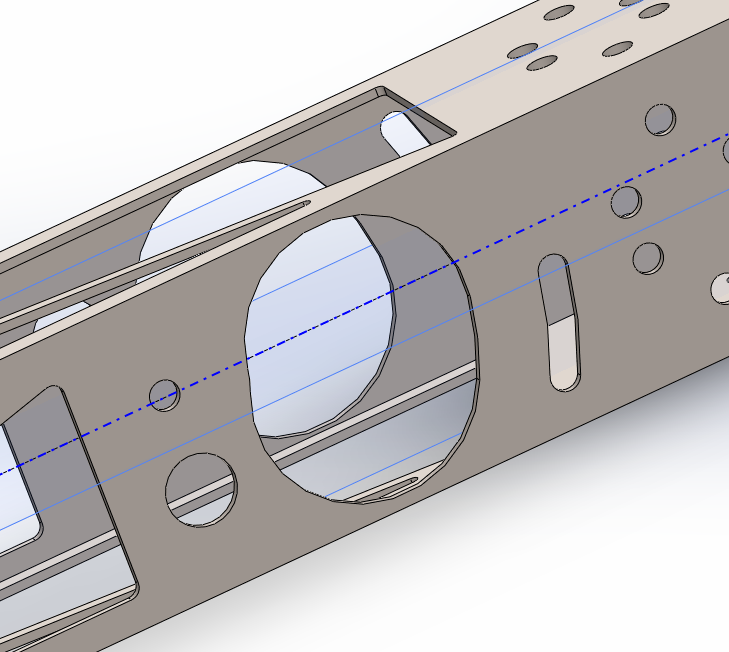
激光切割绝对有优势。一是钢是极好的弹簧材料。为什么不一石二鸟呢?我现在已将可调叶弹簧直接集成到我的激光切割管中。
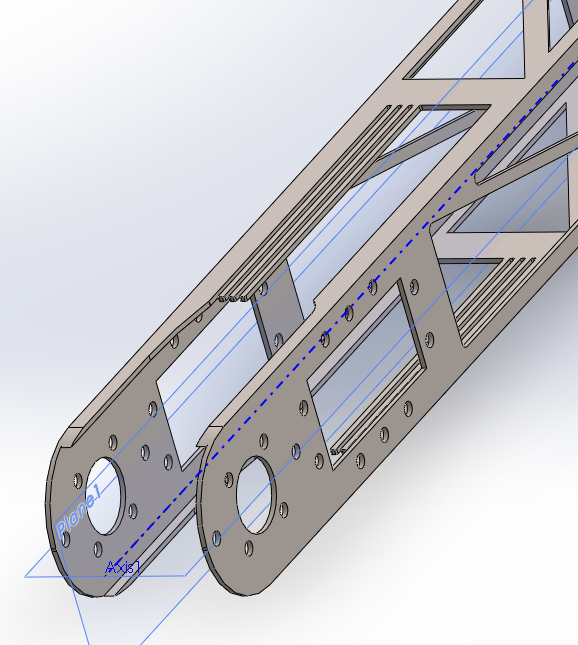
弹簧是三条"线",它们不是直接镜像的,而是彼此设定的180度。通过改变印刷的"平衡"的厚度,我可以"参与"一个,两个或三个弹簧。此外,我可以通过重整打印部件或在整个管周围添加 u 形螺栓(类似于卡车悬架)来更改预装量。
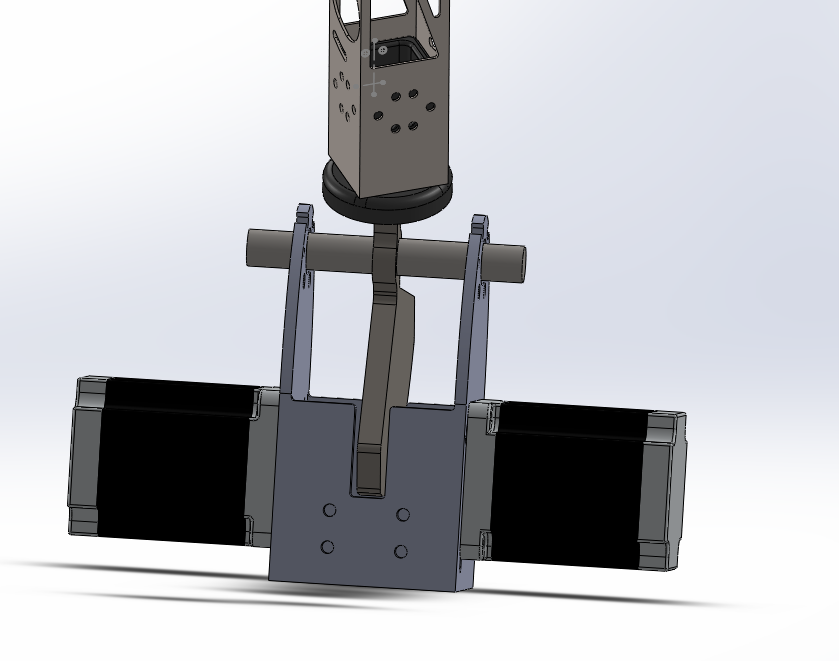
这是我一直在考虑的可堆叠"推手"的可能设计之一。如您所见,它螺栓固定在 8mm 轴枢轴上(现在它是实心铝棒,而不是带轴承的印刷零件)。

在第一张图片中,您还看到对旧管设计的一些修改(这是方形的,在旋转器/枢轴上卡住)。结束现在都是弯曲的,让枢轴四处走动。此外,我添加了IGUS igubal自对齐轴承装置的孔。
在基地,我增加了一个非常大的(巨大的)反重量,以平衡手臂。请参阅下一篇帖子,了解更多详情,以及其余实质性重新设计,所有这些都源于构建原始手臂。
组装第一个,然后第二只手臂后,我真的厌倦了在塑料中手动敲击所有这些螺纹。我想只使用热插页点击插入, 但它将是另一回事买给大家。此外,螺栓电机和接头需要太多的时间(特别是使用尼锁螺母)。有什么建议让事情变得更容易吗?
这是两人的照片在一起。
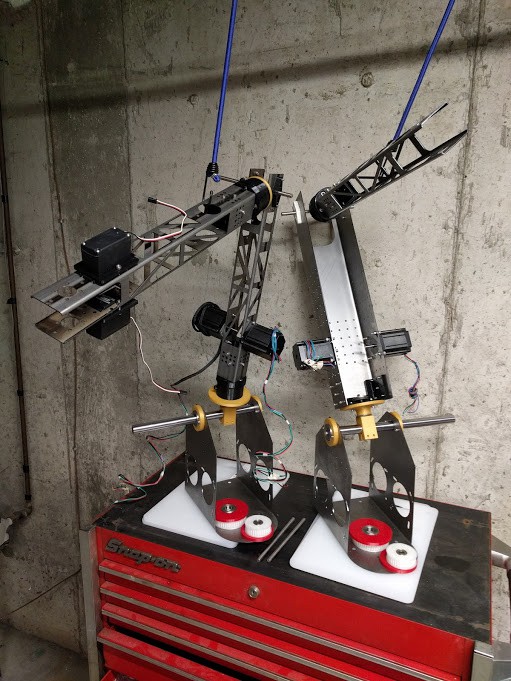

已经这么多的部分需要一些重新设计, 我将更新 Github 上的 Ssl 希望在周末之前。
机器人手臂的最初目标是有一个高精度的4-DOF托盘机器人。
然而,在过去的几个月里,我一直在研究一些适应性更强的东西——一个1米远的协作机器人手臂与7 DOF。当与视觉伺服与相机在机器人上方的棍子上和手腕上的相机结合使用时,手臂应该同样准确。
手臂的主要设计架构是底座上的 NEMA17 步进器来旋转它,之后每对接头 DOF 上的差速器驱动器 - 底座上的 NEMA34,第一臂上的 NEMA23,最后臂上的超大伺服器(±30 kmcm)。
端效应器连接器是 ISO 标准安装(与通用机器人 UR3/UR5/UR10 机器人相同)。
在 github 项目链接上,您可以在 STL(3D 打印部件)和 SLDPRT 中找到金属零件的文件(Solidworks 设计,但我会尝试在 Solvespace 中重新设计它们)。问题跟踪器也有实时。
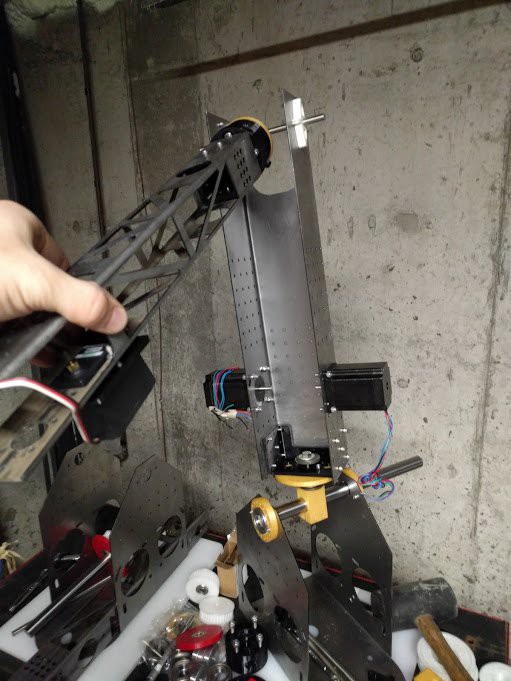
请参阅下图,了解第一个臂构建(已修改以节省重量)

为了更好地了解所涉及的机制,我订购并组装了一个 MeArm。我必须说,以这个价格,这是令人难以置信的!这里有几张照片。
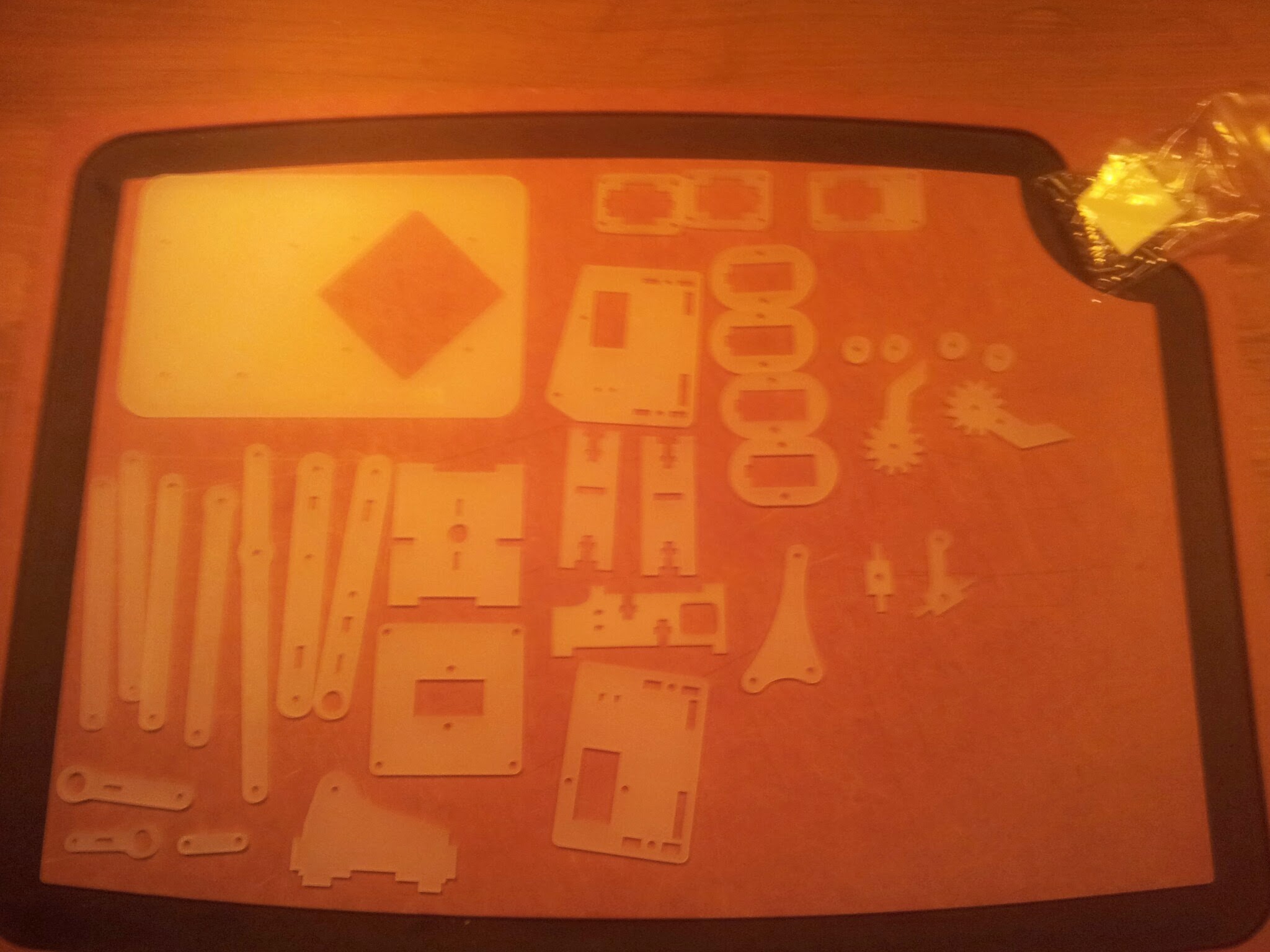
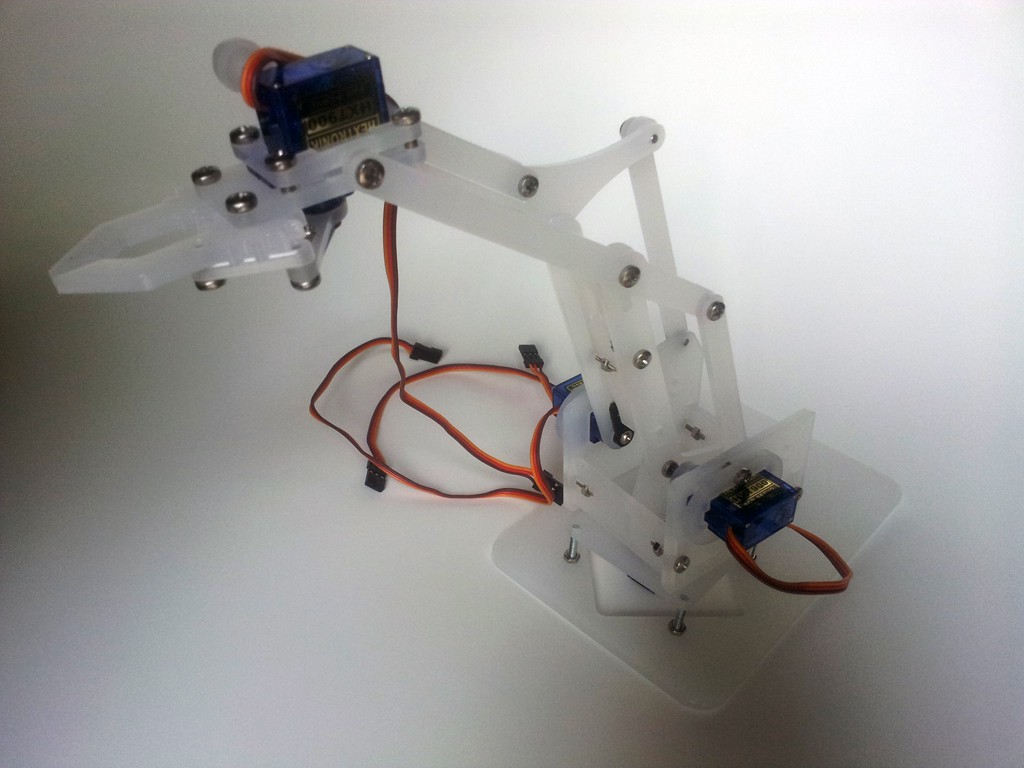
我会做一些改进。第一, 我不会尝试支持手臂的整个质量一个小 9g 伺服。我会尽量支持它在轴承板上, 或推力垫圈或类似的东西。它甚至可以是一块塑料。二,其实没有二!效果很好!
评论
0 / 100
查看更多
2020-08-20
1059

Copyright © 2024 苏州硬禾信息科技有限公司 All Rights Reserved 苏ICP备19040198号