Hackaday.io上的树莓派项目-CORE2 - 机器人计算机
收藏
分享
脑图
Hackaday.io上的树莓派项目-CORE2 - 机器人计算机
关于项目
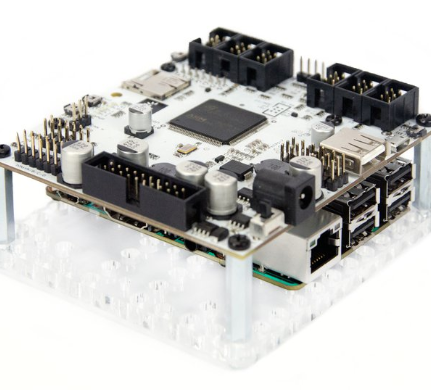
项目描述:Husarion CORE2 旨在帮助创作者构建联网的机器人和无人机。它提供 2 种配置:a)CORE2 - 一台低功耗、云连接的实时计算机,带Wi-Fi b) CORE2-ROS - 一台 ROS 供电的云连接计算机,其 Wi-Fi 结合了 ARM Cortex-M4 微控制器的实时功能和 RaspberryPi 3 或华硕小叮当板的高计算能力。非常适合自主机器人。
项目详情
硬件:
实时微控制器:ARM Cortex-M4 @168MHz,192 KB RAM,1 MB 闪存
CORE2-ROS: 主板计算机: ARMv8 @1.2GHz, 1GB RAM, 16 GB 闪存 (树莓派 3 或华硕叮当板)
CORE2(基本):基于 ESP32 的 Wi-Fi 模块
4 DC 电机输出 = 4 个四边编码器输入
6 个伺服端口,具有可选电压电平(5 / 6 / 7.4 / 8.6 V)
6 个传感器端口(4 个 GPIO、ADC/分机中断、I2C/UART、5V 输出)
扩展端口(12 x GPIO、7 x ADC、SPI、I2C、UART、2 x 分机中断)
可与板载收发器接口
微型 SD 卡接口
USB 串行端口(FTDI 芯片)
电源电压输入:6 - 16V 直流(带内置过流、过压和反向极性保护)
嵌入式软件框架:
C++ 11 API
基于实时操作系统
使用 DMA、中断、RTOS 功能处理通信接口并节省处理能力
并行处理多个 2D
SDK = 用于脱机开发的可视化工作室代码扩展
用于在线开发cloud.husarion.com的 Web IDE
阿尔杜伊诺· 康帕蒂比勒
支持ROS(机器人操作系统):
一个专用的基于 Ubuntu 的图像与 Ros 为核心 2 - ros
云:
您列出的所有cloud.husarion.com
轻松为每个机器人创建自定义 Web 用户界面
通过链接或电子邮件共享机器人
使用 WebRTC 流式传输视频 - 例如,用于网真机器人
项目图片
你的机器人只需连接到互联网是不够的。它应该安全连接,所以未经您的批准,没有人可以访问您的设备。在Husarion,我们在几个不同的领域解决您的机器人的安全性
a) CORE2 和云平台之间的连接 - 每条消息都经过加密,并且为 CORE2 和 CORE2-ROS 实施了完整的 SSL 协议。
b) 您的云帐户和代码执行 - 为用户界面提供电源的 JavaScript 代码在每个机器人的单独沙盒中执行。在 Web IDE 中编译代码时,编译也会在沙盒中进行。在沙盒中工作可确保用户不会影响服务器或其他用户帐户的操作。
c) 机器人共享设置 - 安全并不意味着只有你可以使用你的机器人。由于共享设置,你可以与你的朋友共享你的机器人在固定的时间量(几分钟,几个小时,几天,...或永远),并具有指定的访问权限(只读、完全控制等)。选择访问权限后,您可以决定如何共享机器人。
有两种方法:
通过一个"神奇的链接" - 任何人谁有链接可以访问机器人 - 即使没有帐户在cloud.husarion.com。
仅与cloud.husarion.com共享。使用此选项,您的好友会在他们的机器人列表中看到您的机器人,如果您给予他们自由访问权,甚至可以更改其固件。
d) 到 CORE2-ROS 的 Web 控制台:您可以通过您的用户帐户访问 CORE2-ROS的 Linux cloud.husarion.com控制台。您的机器人连接到哪个网络并不重要。连接是使用计算机和HTTPS://WWW.ZEROTIER.COM/2-ROS之间提供安全、轻松的 VPN 设置的新项目项目完成的。
e) 运行气隙机器人:由于我们的离线 SDK,最安全敏感的机器人无需访问互联网即可运行。
您不需要成为互联网技术专家,即可在线管理基于 CORE2 的机器人,而不必担心未经授权访问您的设备。您可以只关注您的机器人应用。
我们经常听到的一个问题是"我需要胡萨里翁云来使用 CORE2 吗?答案很简单:"不,别担心,我们同时提供离线开发工具。
为此,我们为 Visual Studio 代码创建了一个"Husarion扩展",该扩展为您准备开发环境、安装工具链并下载 SDK。这样,您就可为机器人完全脱机开发代码。
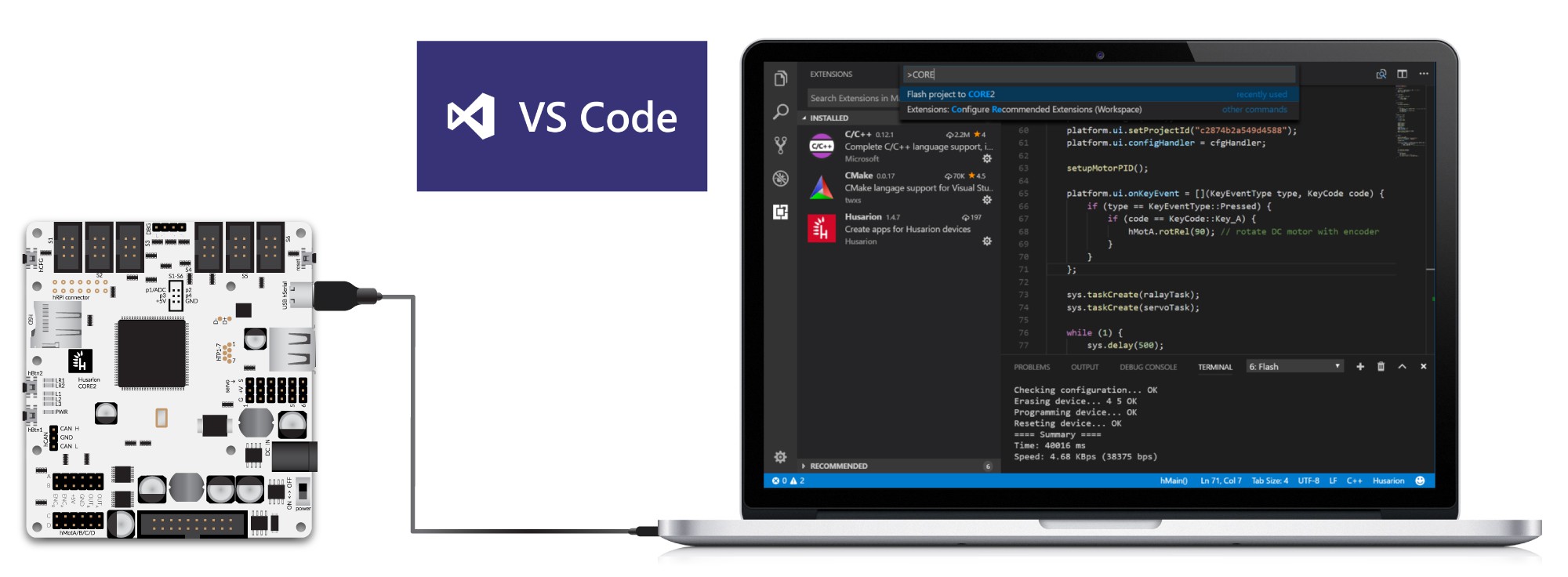
安装和使用"Husarion 扩展"非常简单:
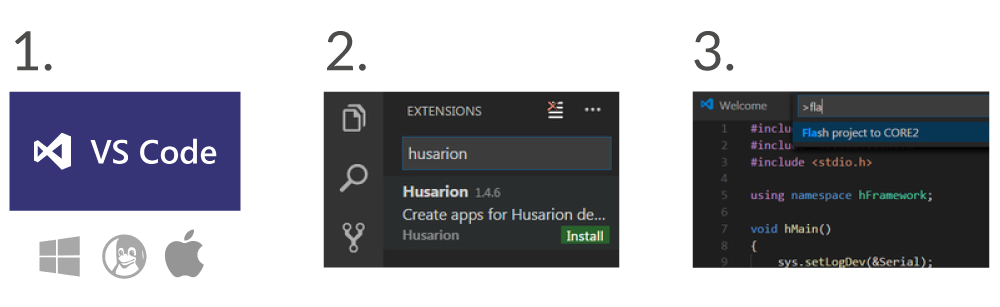
下载可视化工作室代码
安装 Husarion 扩展
使用 USB 电缆编写代码和闪存 CORE2
如果您是 Emacs、Vim、Eclipse 或任何其他代码编辑器或 IDE 的用户,您可以下载我们的 SDK 并配置您最喜爱的开发环境。
如果您有 3D 打印机或其他制造塑料外壳的可能性 - 我们有一个好消息给你!我们为不同的电路板配置设计了简单的外壳:
仅 CORE2
CORE2-ROS(顶盖相同,但底盖已扩展,以满足 BC 大小)
CORE2 带 CORE2 砖屏蔽(底部盖与 CORE2 相同,但顶盖已扩展以满足护罩尺寸)
CORE2-ROS 带 CORE2brick(顶部和底部盖已扩展)
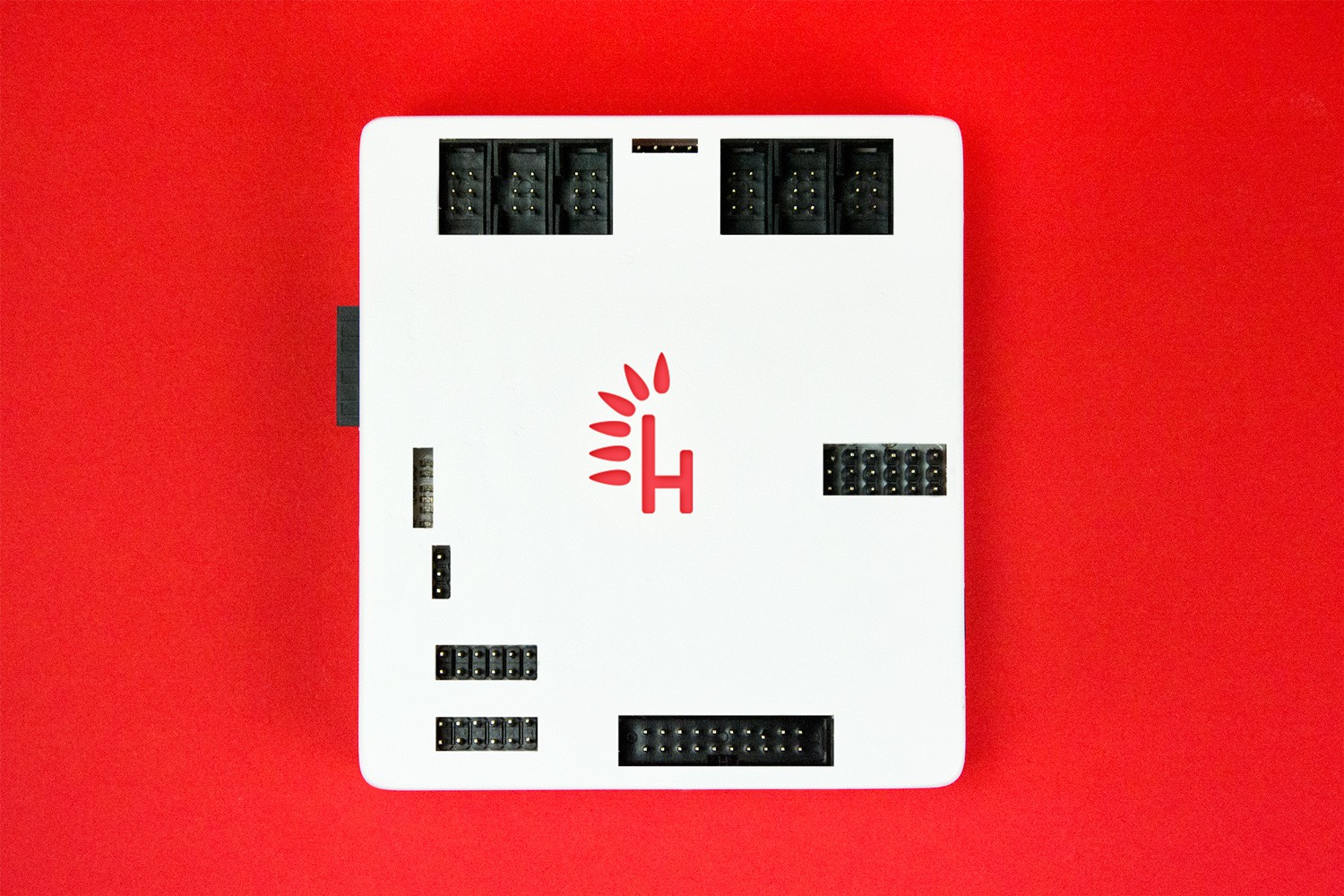

机柜是开源的,可在 GitHub 上提供
涵盖的主题包括:
罗斯介绍
创建节点
移动机器人的简单运动学
视觉对象识别
在多台计算机上运行 ROS
大满贯导航
路径规划
未知环境探索

评论
0 / 100
查看更多
2020-08-19
744

Copyright © 2024 苏州硬禾信息科技有限公司 All Rights Reserved 苏ICP备19040198号