Hackaday.io上的树莓派项目-机器人神话学树莓PI模块
收藏
分享
脑图
Hackaday.io上的树莓派项目-机器人神话学树莓PI模块
关于项目
项目描述:机器人树莓派零的传说开始写作。我不只是为树莓 PI 创建扩展板步进驱动程序。我会创建更多的模块板的章节, 如核心少电机为微型迷你无人机伺服等。所有我想要的制造商可以建立机器人与相机覆盆子 pi 很容易使用计算机视觉或需要高处理的东西。
项目细节
第 1 章:树莓派零 W步进电机
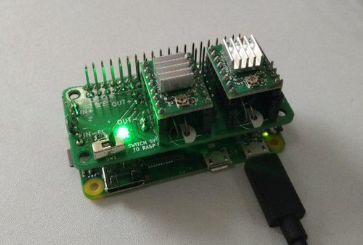
树莓派零W是如此小的4步进电机驱动器 a4988 模块,所以我分开的故事2部分。第 1 部分用于 2 个模块驱动器和电源,第 2 部分只是模块驱动器 a4988。
第 1 部分:机器人自平衡
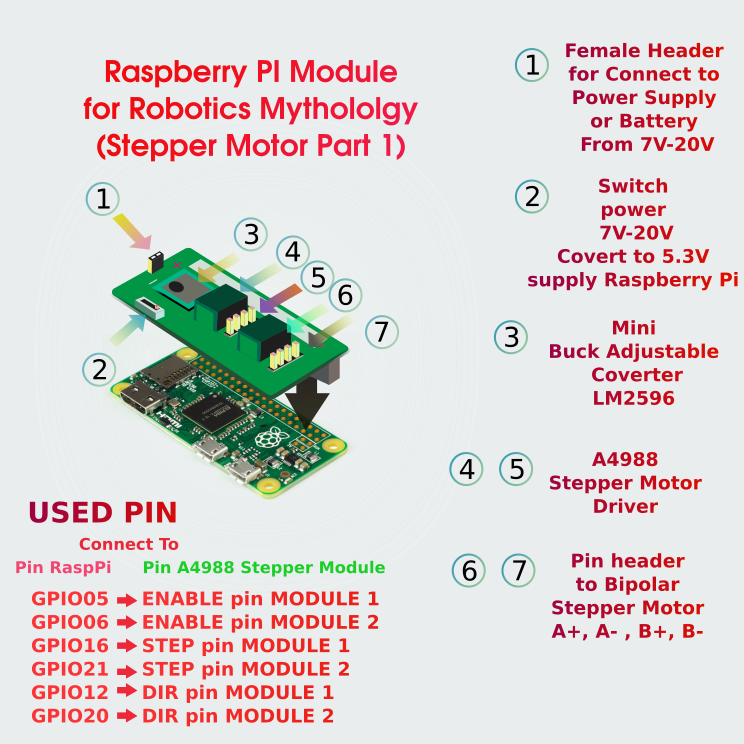
机器人自平衡具有出色的步进电机性能。因为步进允许我们计算步进,精确和高扭矩没有齿轮箱。自平衡机器人需要电池轻量级,陀螺仪和电机,我们可以计数步进像步进电机。该板模块具有 lm2596 迷你稳压器电源模块可调。因为电池的电压不稳定(电池总是过电或每次都变低)。当我们要把它插入树莓派零 W, 我们需要插入电池(!!不要使用超过20V的电池,并关闭板模块步进器关闭,并打开电位计内部电源到5.3V-5.5V测量它用万用表之前,你把它超过40针树莓派零W。然后在插入步进电机后再次使用万用表检查功率电压。而A4988驱动步进电机,我们只能使用3A步进电机。
该驱动程序中使用的引脚:
GPIO05 -> 启用销模块 1
GPIO06 -> 启用引脚模块 2
GPIO16 -> 步进针模块 1
GPIO21 -> 步进针模块 2
GPIO12 -> DIR 引脚模块 1
GPIO20 -> DIR 引脚模块 2
电源:
In=LM2596 连接到电池 |
In -LM2596 连接到电池 -
OUT=LM2596 连接到树莓派 5V 引脚 (!!!如果打开指示灯 LED 的开关)
出 -LM2596 连接到 GND
第 2 部分:数控机或 3D 打印机(敬请期待)
我将继续写作后, 我设计下一个 Pcb
请给我一个大拇指, 激励我继续设计第 2 部分
项目图片
文件下载
4 X A4988 步进电机驱动模块
4 X 电容器 100 微法拉特
1 X 螺丝刀
1 X 树莓派零 W
2 X 电池锂
1 X 头 女性和男性 40 针
1 X 连接器 2 端口
4 X 接头公 4 针
1 X SMD 保险丝
1 X smd 领导
1 X res 330
1 X lm2576 迷你模块
项目日志
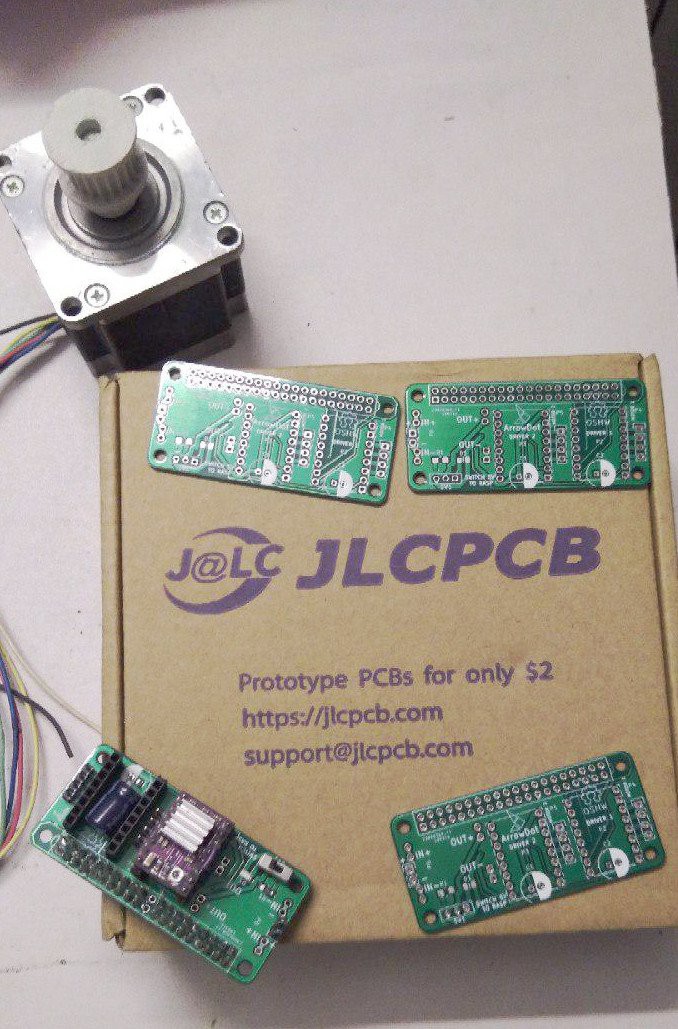
这么快到达!PCB只是花2美元pc8美元的航运总10美元,他们为我10板,我只是等待只有10天。10- 10 -10 !现在我的另一样东西没有到达, 只是等待它。降压转换器 lm2596 和头销 2x20。
我很快就会展示出来后,我得到我的PCB板第1部分jlcpcb.com我修改它,我发送它两个得到低价格航运事业板只有2美元和航运价格7美元。
我派格伯jlcpcb.com2018-03-15 16:19:35。 我花了2美元pc和7美元的航运,它退出便宜。现在等3周才能拿到。
评论
0 / 100
查看更多
2020-08-19
1043

Copyright © 2024 苏州硬禾信息科技有限公司 All Rights Reserved 苏ICP备19040198号