Hackaday.io上的树莓派项目-自动割草机
收藏
分享
脑图
Hackaday.io上的树莓派项目-自动割草机
关于项目
项目描述
自动切割是一个自动割草机。目标是:
- 全自动操作
- 换电池站而不是
充电 - 长期:不要随意开车穿过花园,但要有计划
项目细节
机器人本身的系统设计

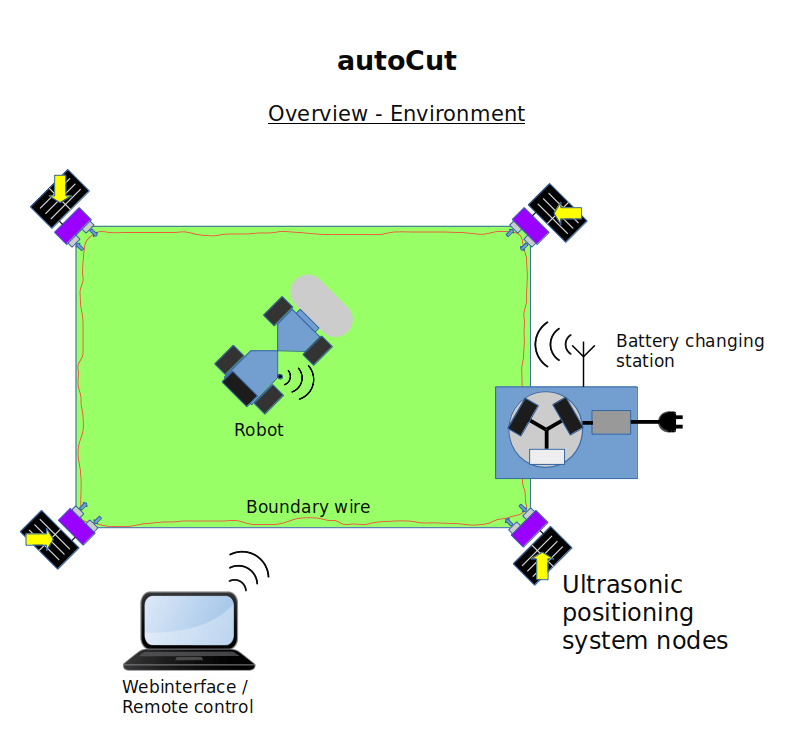
整个系统的概述
项目图片

项目组件
1 X 12VDC 齿轮电机,用于设置割草高度
1 X 从铝棒上手工制成的底盘
4 X 车轮
1 X [注]这些只是主要组件。有关详细信息,请参阅 GitHub 链接 ( https://github.com/schuhumi/autocut )
1 X 树莓派 B (第一版)
1 X 带宽范围天线的 TP-Link USB 无线加密狗
1 X 电源模块
1 X 驱动模块
1 X 割草模块
2 X 14.8V 5Ah 可充电 LiPo 电池
2 X 5V USB 电源
4 X 6-24VDC 减速电机,用于驱动 (CHM-2435-1)
2 X 12VDC 割草电机 (CHM-2435-1)
"Angstwiderstand"(字面意思"恐惧电阻器")是德国用于在设计中不执行任何操作的电阻器的德语表达式。以下是您无论如何都应该将它们放在其中的原因:
今天,我在控制高度调整的h桥方面遇到了一些问题。后来,我愚蠢地把机器人放在车库里,打开大功率电路,让usb电源银行充电。一段时间后, l298 h 桥疯了:

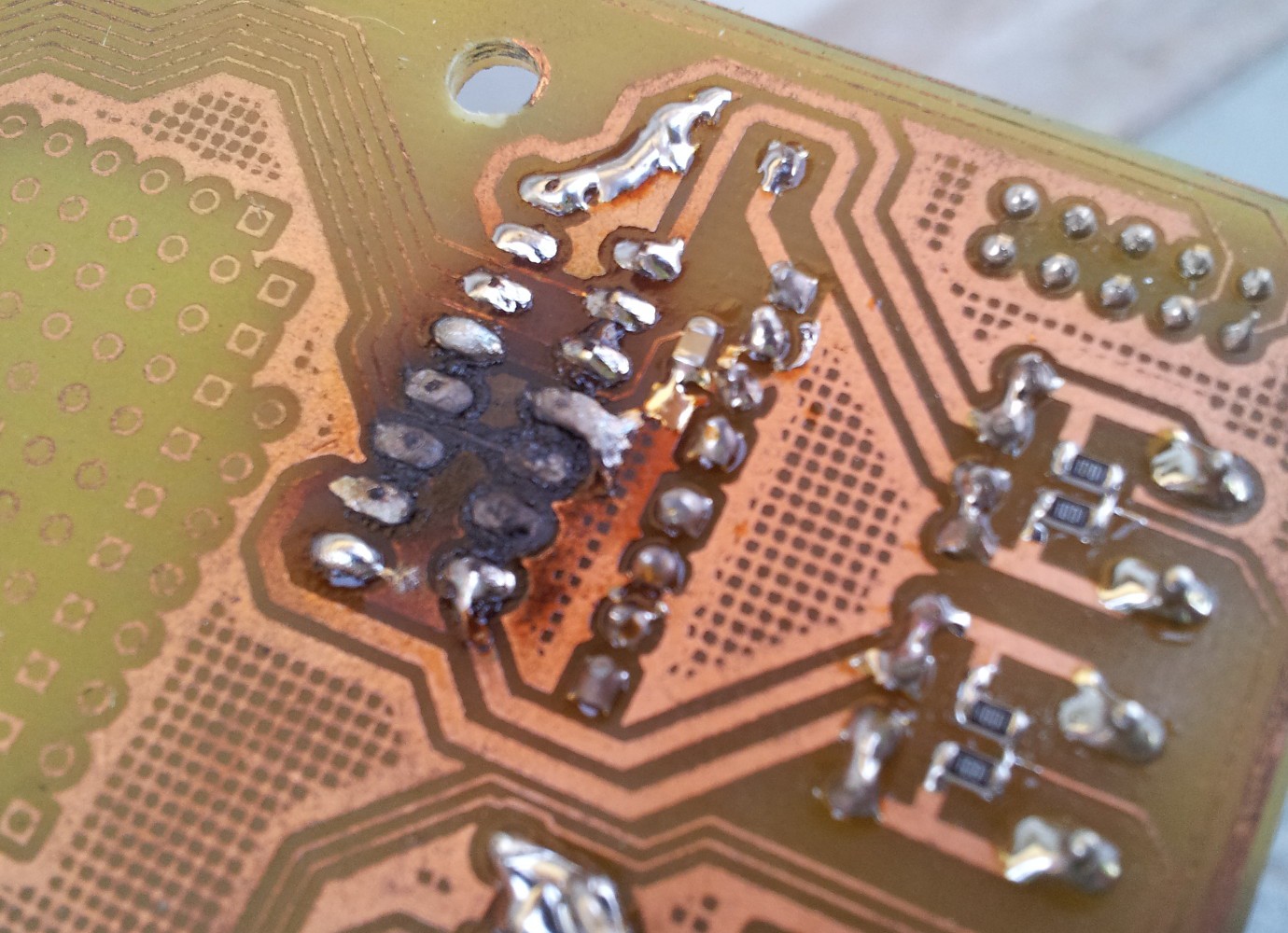
现在,这是吐司。在高功率侧,l298 连接到 14.8V 电源轨 (+BATT),输入引脚连接到微控制器:

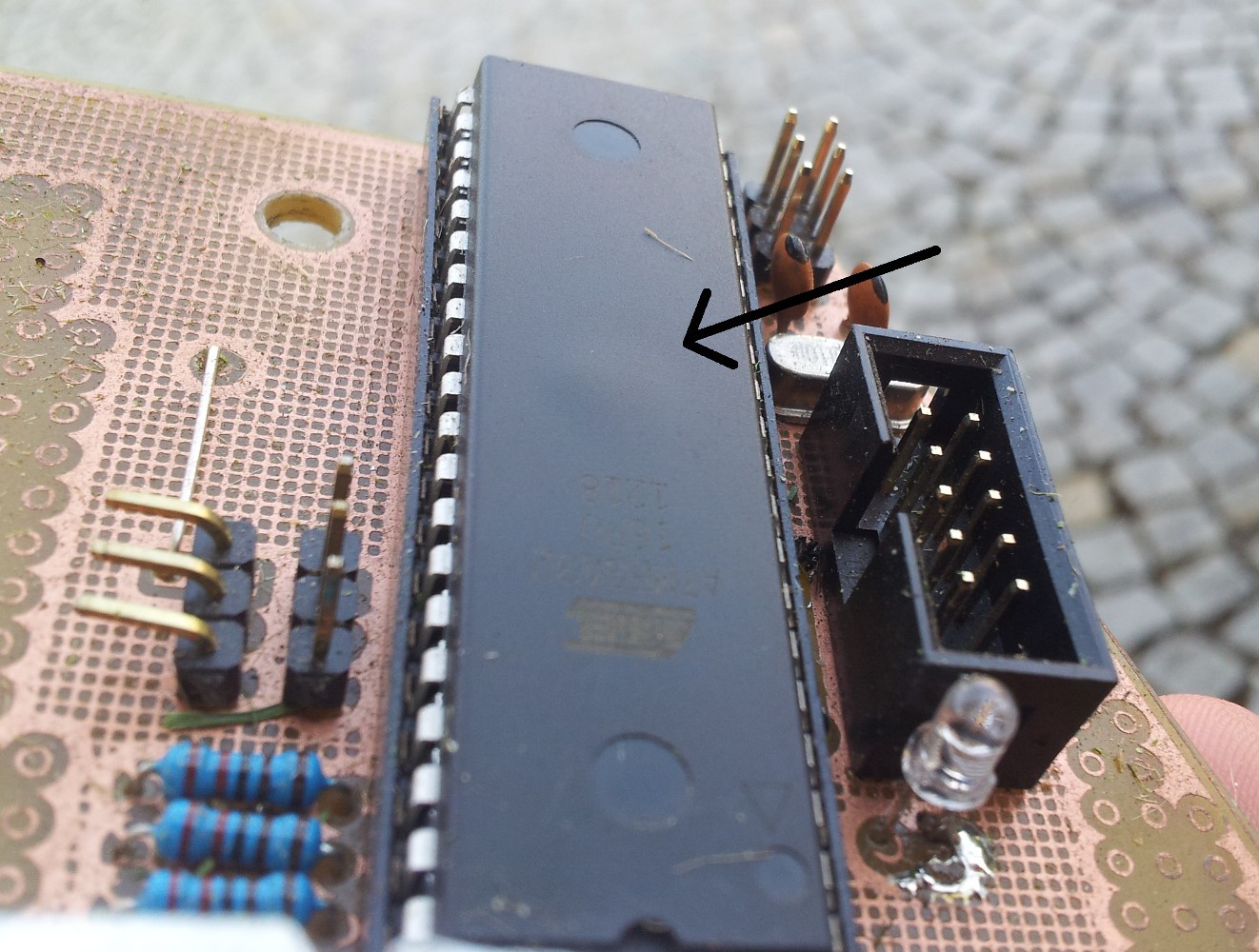
似乎当烟雾中爆裂时, l298 短路了 298 到微型, 这摧毁了它。看看那个凸起:
正如你在原理图中看到的,微型还控制4个FET,其中两个为割草电机提供动力。
因此, 我有一个吸烟的机器人运行它的全速割草刀片, 尽管所有的控制器都关机。当我发现那一幕再次获得控制时,幸运的是,就像翻转高功率电路的开关一样简单。从中学到的东西:
将电流限制电阻器放入数据线(Angstwiderstand)中,以保护元件彼此免受相互损坏的损坏。在这种情况下,l298 和微控制器之间的所有连接中的 1k 电阻器都可以防止这种情况
不要让奇怪的装置无人看管, 只有一个摩斯费特, 防止它们变得危险
防雪防护和翻新驱动系统
嗯, 自从上次更新以来已经一段时间了。- 但随着假期, 现在发生了一些事情:
正如你可以看到背面的外壳取得了一些进展, 现在有一个雪盾!
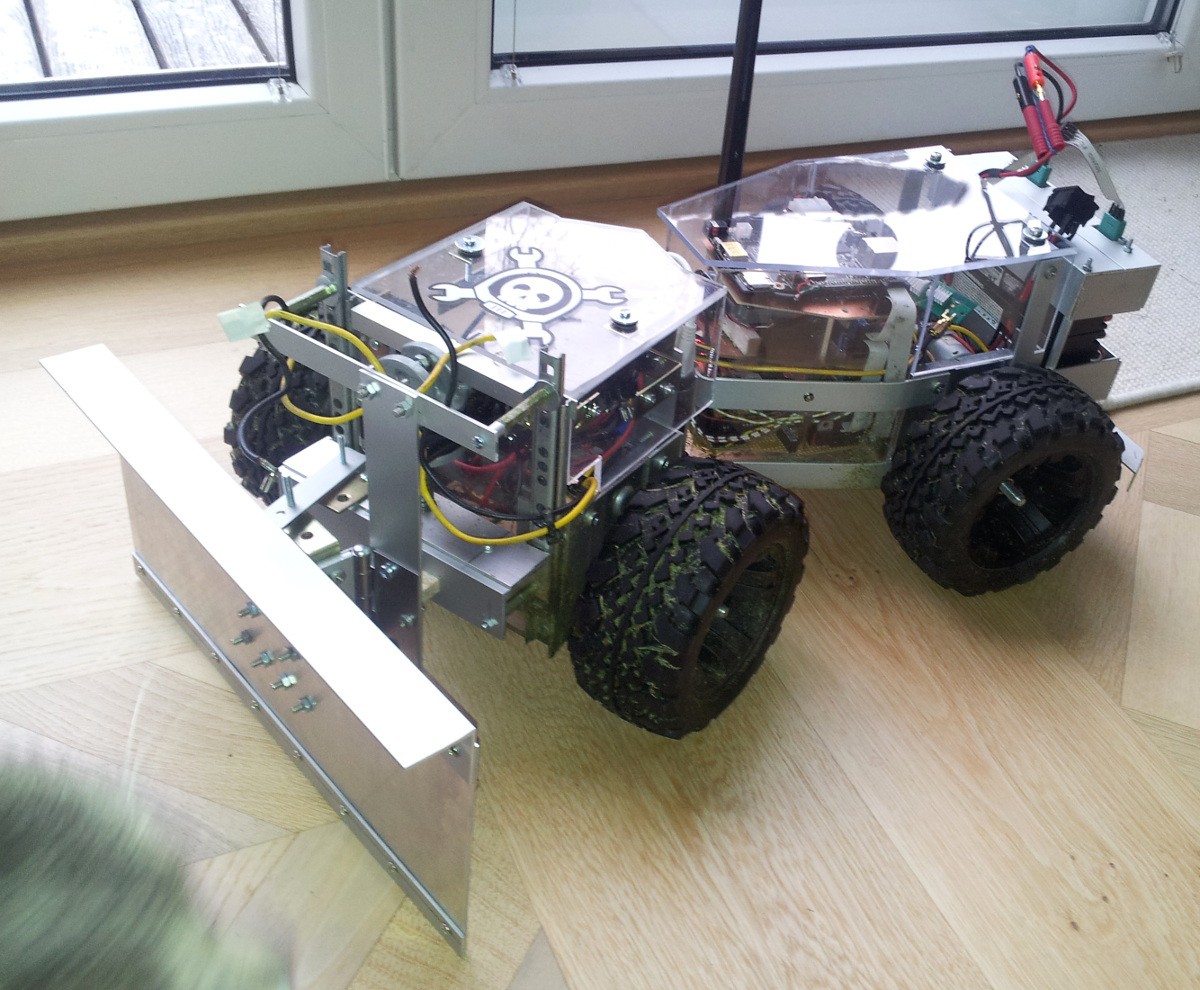
我向你保证, 它确实工作得很好, 但我错过了拍摄一个视频, 并把它拆开后不久。原因是,现在驱动器系统必须做一些繁重的工作,它揭示了一些问题:
将车轮安装到电机上不足以进行雪犁
驱动系统支持两种模式:a) 调节扭矩:从前轮测量扭矩值,做一些微积分并将其应用到后轮 b) 调节速度:所有车轮的速度单独调节,这不适合平坦表面(电机比自由度多 - > 由于不准确而轻微撕裂轮胎),但对雪非常好。问题: b) 似乎没有它曾经那么好, 不知道为什么, 虽然。我怀疑 Backemf 速度测量会有些麻烦
对策:
这是车轮的新安装系统。是的,我钻错了:-D没问题。由于螺丝没有打滑了,轴也相当直。
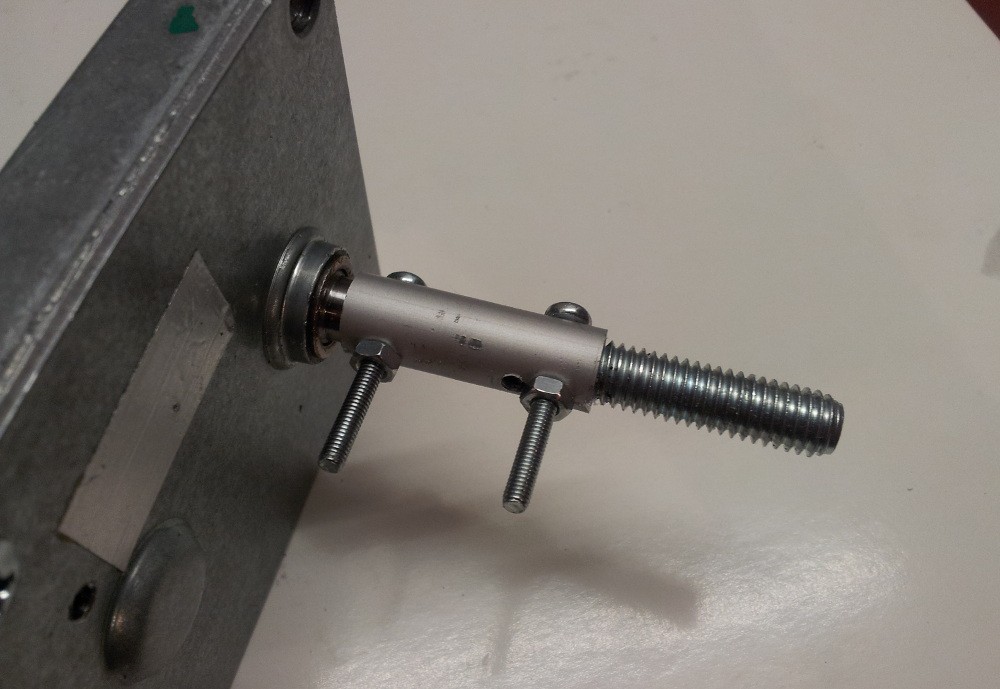
电机的另一个问题是变速箱和电机本身之间的连接在所有情况下都松动,因此整个总成相当嘈杂。为了解决这个问题,我打开了盒子。可悲的是, 他们并不意味着要打开, 所以你必须钻打开他们 (6 - 7 毫米钻, 去每个角落 + 2 毫米) 。这是迎接你:

清洁讨厌的润滑脂(<- 诚实的工作最多)并拆解:
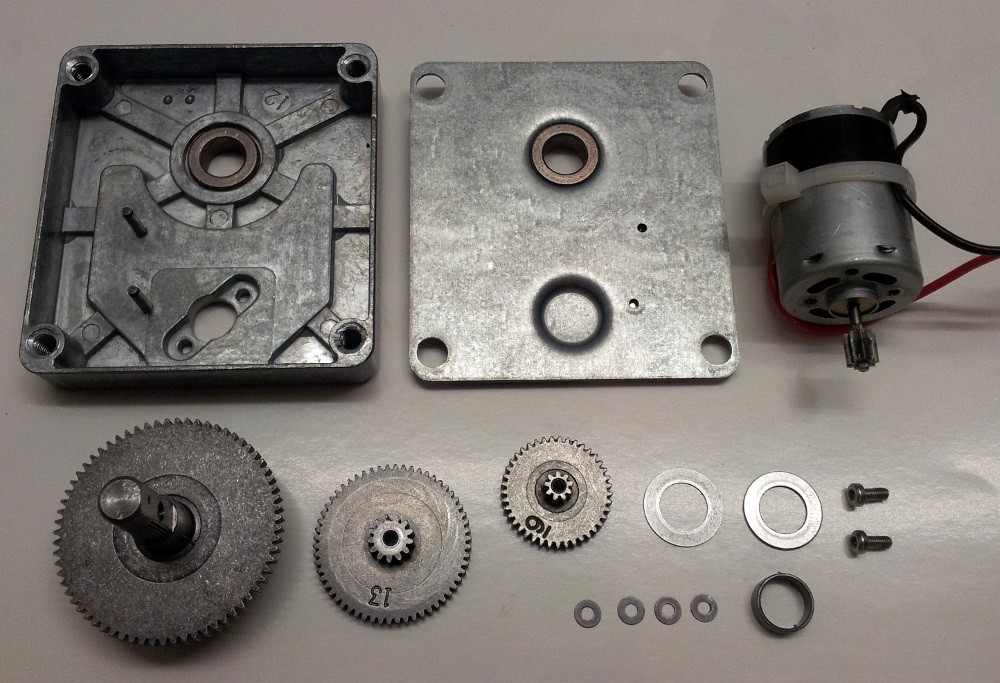
电机安装有(稍大一点)固定环,最初只使用 loctite。

以下是有关速度测量的线索:

BackEMF 将由光电传感器支撑,因此齿轮上有两个孔。为什么不完全更换 BackEMF 呢?嗯,以下是所有齿轮的齿数:
电机: 9
小齿轮: 9, 41
中间档: 13, 58
大齿轮: 67
因此,光电传感器每上升或下降沿的度数为:0.5 * 9/58 * 13/67 * 360° = 5.4°
与14厘米的车轮,是距离:0.5 * 9/58 * 13/67 * 2 * Pi * 70mm × 6.6mm
我很肯定,这还不足以对非常低的速度进行适当的监管。现在我可以钻更多的洞到齿轮, 但那些是如此该死的岩石固体, 我毁了我所有的 3 毫米 Hss - g 钻头与 4*2 孔已经 - 所以不, 不会这样做。
对于传感器本身,我订购了 3 毫米(如 LED)光传递器,这些光传输器插入齿轮一侧的 3mm 孔中,另一侧的 3mm LED 中插入。
下面是我添加到高度调整机制的另一个小东西:

在理论上,如果高度测量的连接器松动,电机可能会撕裂组件或使电路冒烟。现在,它被关闭的限位开关和二极管允许它只能驱动下来
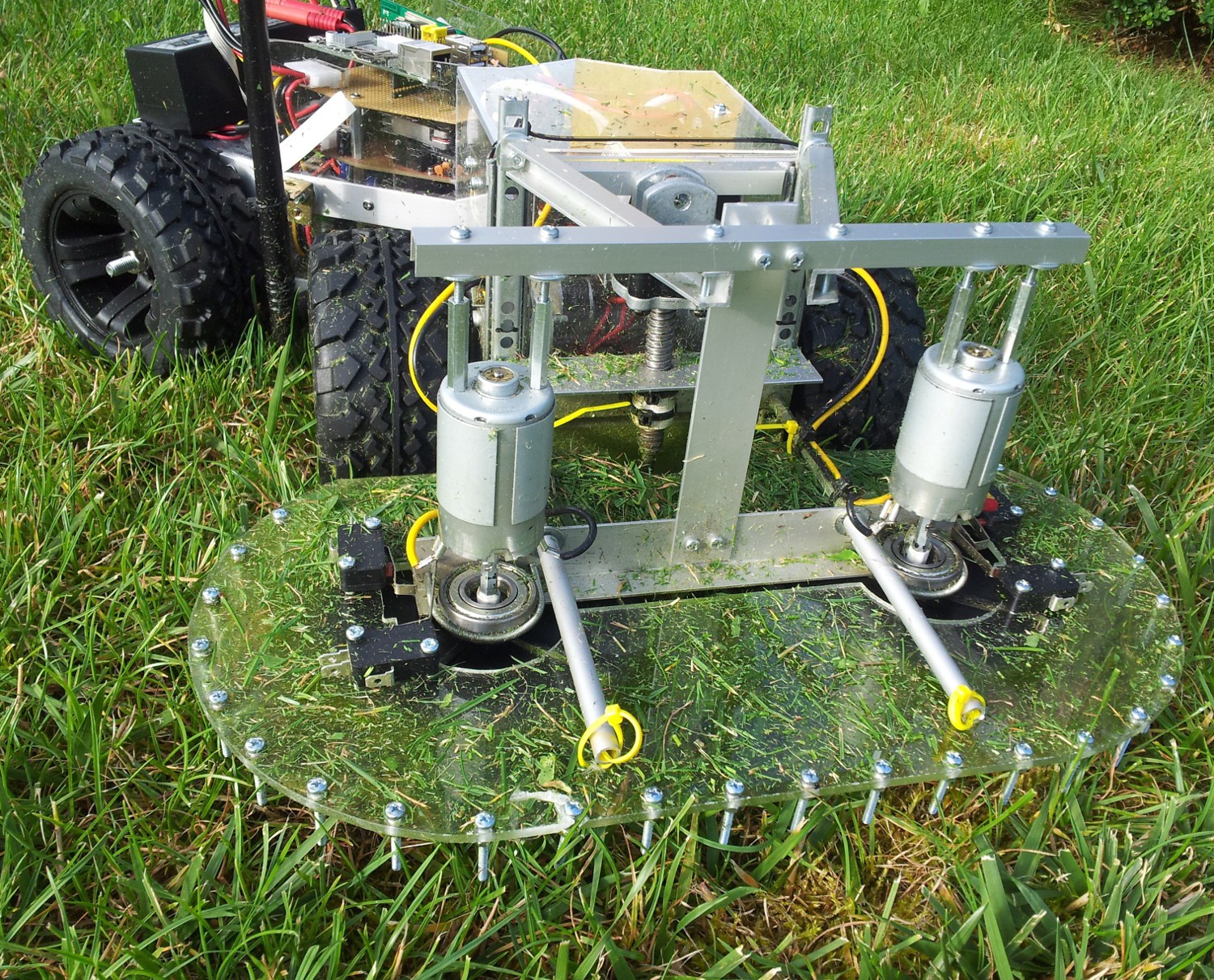
最近几天我正忙着重建割草系统。现在噪音和振动都少了很多。它还安装了带弹簧的激光切割罩,使其灵活。

毫无疑问, 树莓派是将嵌入式Linux 带给业余爱好者和修修补补者板。事实上,我是购买一只非常早期的鸟类之一。你可能还记得 Rs 和法内尔得到了 Ddos 'ed 非常糟糕 - 这是一个真棒感觉, 看到拉普贝里收集这么多的关注。
慢速 CPU
非常有限的 RAM(请记住,第一个版本只有 256MB)
功耗不是特别低
最烦人: 一个可怕的硬件相关的 I2C 错误, 这使得与 Ars 的沟通非常困难。如果 AVR 不能立即处理 I2C 事件,它使用时钟拉伸,但这可能搞砸了树莓的 I2C 总线硬件明智。
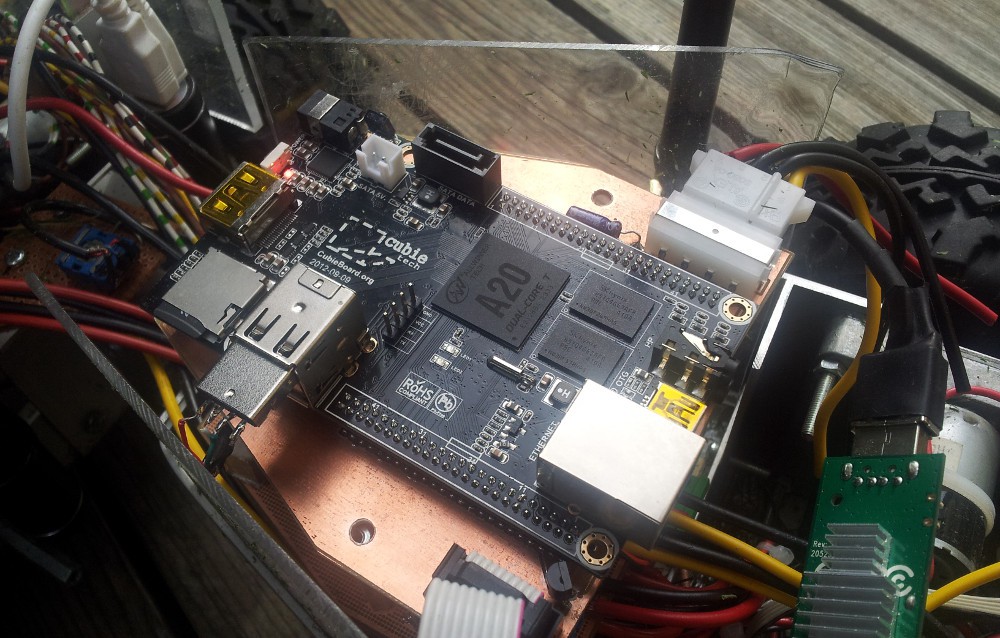
我检查了 Archlinux Arm 支持的所有板, 并解决了小板 2:
它位于家庭蚀刻的PCB上,仅与5V/GND/I2C连接
与该项目相关的一些好处:
正确的 I2C 接口 (!)
双核 A20 处理器速度非常快
1gb 公羊
功耗更低
4GB 内部闪光灯。立方体板 2 (类 4 μSD) 已经启动速度比树莓派 (类 10 SDHC) 更快, 使用内部闪光灯将进一步减少启动时间.
关机时,主板实际上自行关闭 - 这可以用作电源模块的断电信号
电路板右侧的扩展接头(底部)
不理想的东西(只是小瑕疵):
扩展标头为 2mm,因此原型设计板不是一个选项
扩展接头上没有 USB
要通过接头为它供电,需要短路一个二极管 (D2)
数据包的外观:
两个开始位(都高)
四位目标地址
四位命令(主传输 1=DoEcho,节点响应 2=EchoReply)
两个奇偶校验位
一站式位
我需要增加奇偶校验位的数量,因为两个位导致奇偶校验正确 25%的机会。
切割工作的速度惊人地快(与邮件中估计的交货日期(10. 10)相比)。一切都很愉快。引擎盖 (对不起质量差, 手机有焦点问题):
盘片:

新的盘片大大降低了噪音,但是由于轴承磨损(以前的设计相当不平衡)和修改不准确的电机轴(以前的设计需要扁平轴)仍然有一些振动。
超声波定位系统是自动定位的突出特点之一。因为我听说过的其他 (割草机) 机器人有这个功能, 这是一个艰难的。我张贴了一个草图,如何可以工作,我开始做一个概念证明。
这是它的工作原理:
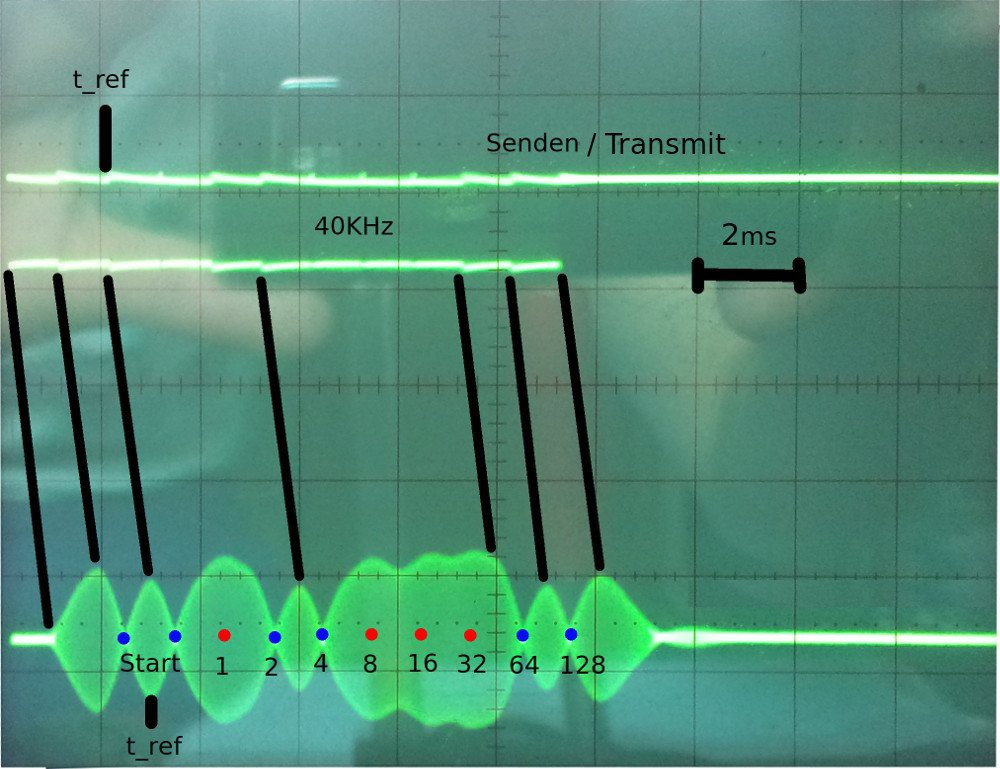
顶部的信号是输入超声波发射器的信号。只要传输数据,它是 40KHz,每 1 个周期有半个周期的相移(波被反转)。在振荡接收器上,这会导致振幅降至 0,然后再次上升。因此,1es 是振幅为零(蓝点)和 0 是振幅保持高(红点)。
在这种情况下,数据流为 01100011,用正确的二进制编写:0b11000110(首先传输最少的重要位)。
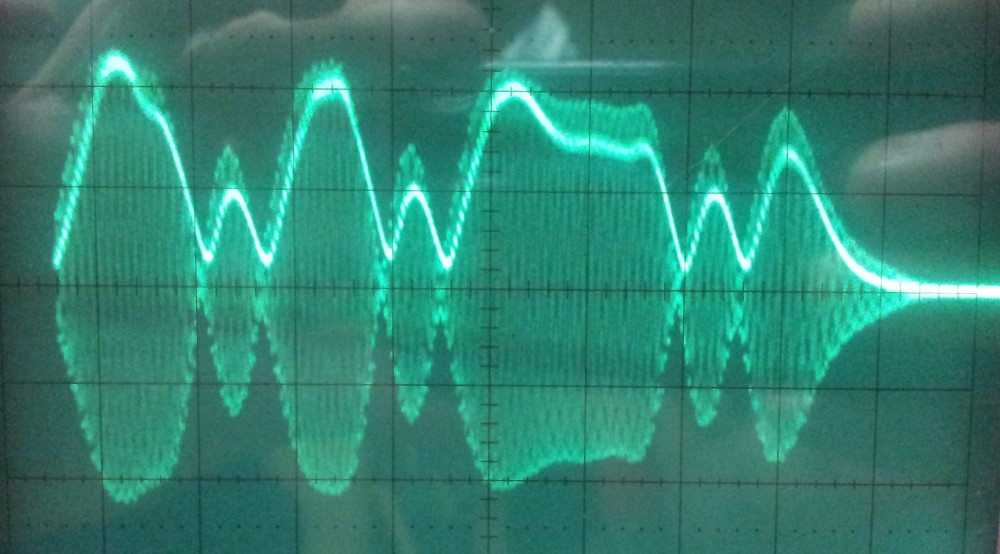
接收机的信号被电容器放大、双向纠正和缓冲。这将创建一个表示接收信号振幅的信号。
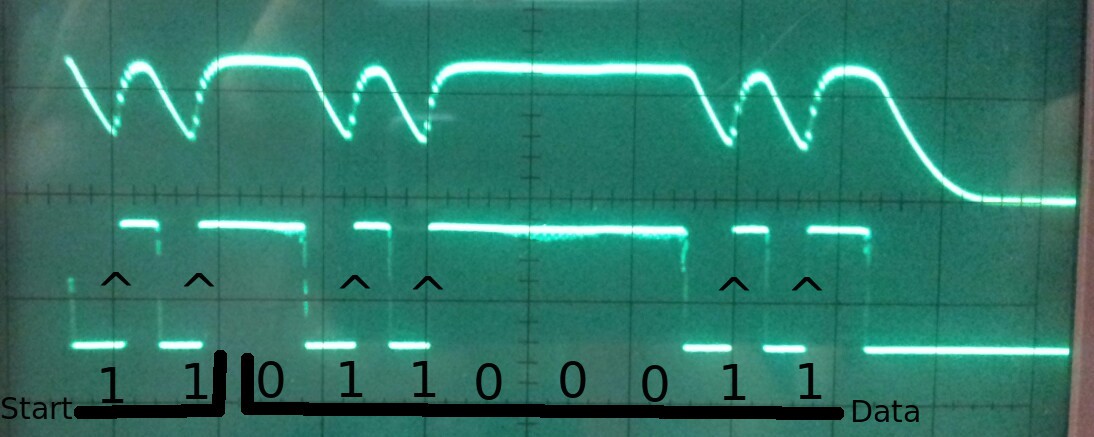
在小相移(由电阻+电容器引起)的帮助下,比较器创建一个数字信号,指示信号何时开始上升或下降。现在,当振幅为 ±0 并再次开始上升时,数字信号会从低到高切换。在友好条件下,这已经足够解码数据流了。
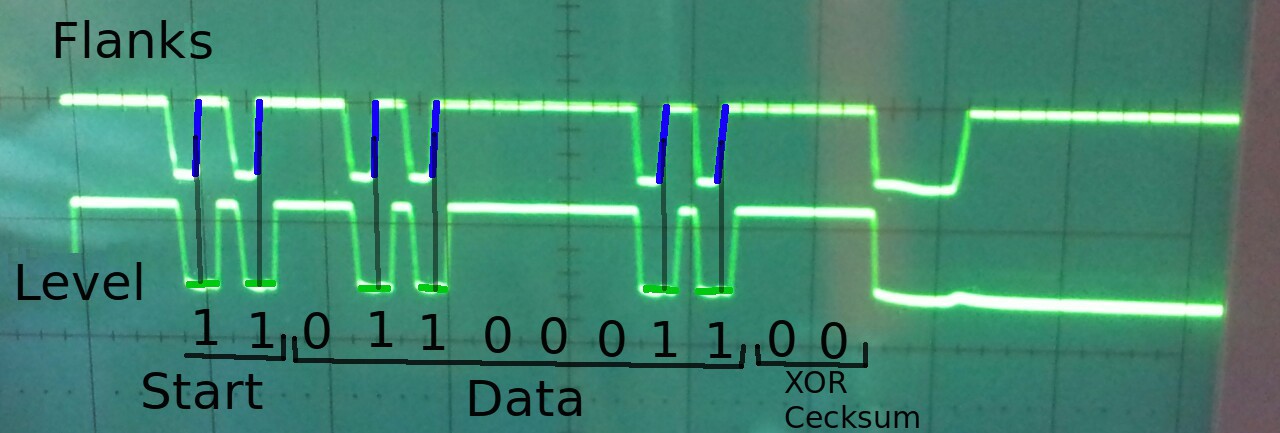
若要确保从低到高的开关有效 1es(振幅必须接近零),使用另一个比较器创建表示振幅级别的信号。要接收有效的 1,必须出现从低到高的齿面,并且振幅水平必须为零。正如你可以看到我也介绍了一个小的XOR校验和,这将扩展到4位由于偶尔的假数据(2位:25%的机会,损坏的数据流的校验和恰好是正确的)。
到目前为止,我对结果非常满意。我正在改进:
使用MAX232作为变送器的放大器
使用更好的接收器/发射器胶囊
对接收信号使用更好的操作放大器 (CA3140 到目前为止无法执行轨到轨 - > 5V 电源上的最大输出为 2-3V)
获得双向数据传输和距离测量工作
找出一种方法, 将声音传播到所有方向
已经有一段时间前,我构建了一个电池组原型:

它可以容纳两个14.8V 5Ah LiPo电池并联连接。我做了一些测试与一个电池早些时候, 估计这应该足以割草至少 1.5 小时不停。
除了连接器方向外,设计是镜像的。带两个连接器的正面将位于机器人上,左侧连接器提供放大器,右侧连接器报告单个单元电压。另一侧的连接器(当电池组安装在机器人上时朝上)也完全相同。这个想法是,换电池站可以抓住包,并连接到它一步。更换站将是一个大磁盘,可以旋转,向上/向下移动,并容纳多达3个电池组
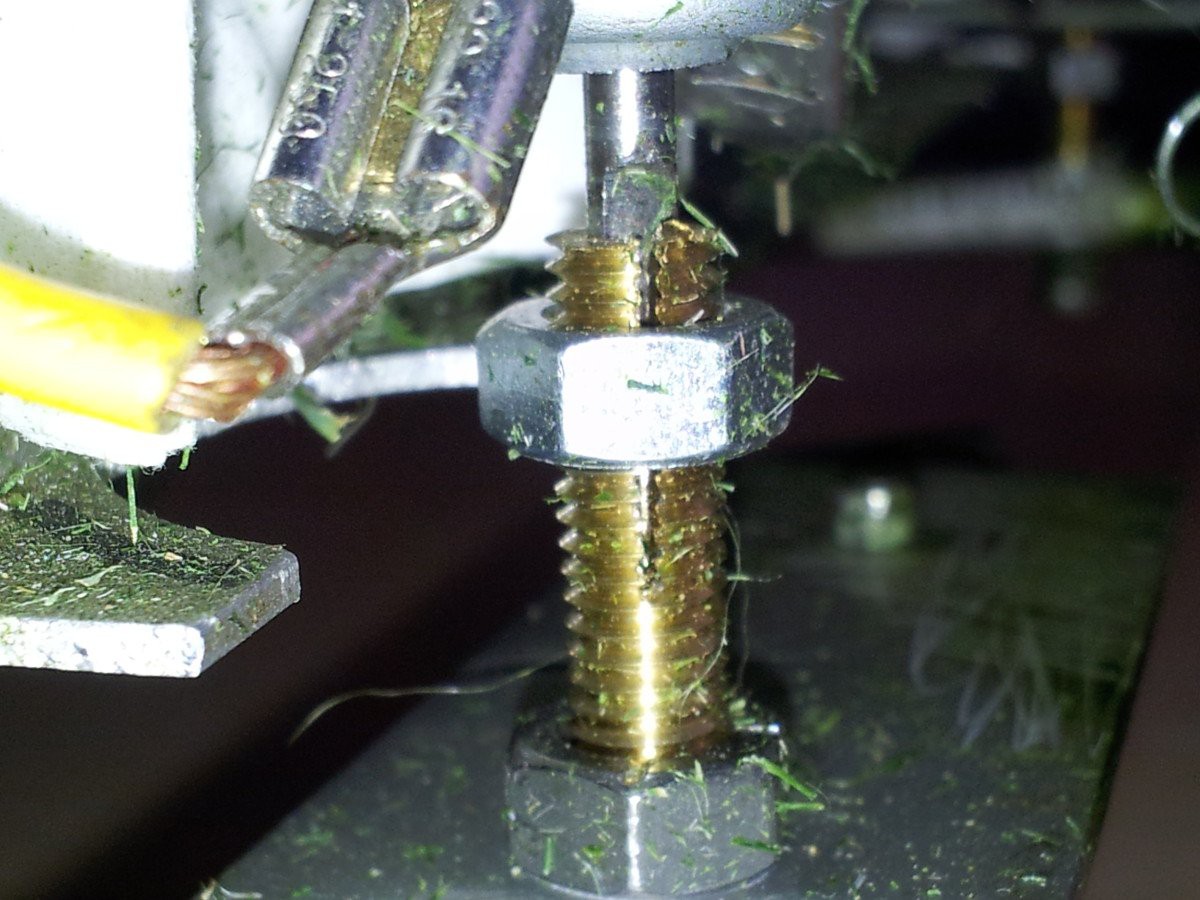
机械学上最大的问题是如何建立对接机制。问题是,这必须是非常准确的顺利工作,但我最先进的工具是一个无绳钻...必须通过带垫圈在较大孔或其他的螺钉进行精细调整。
这是电池组内的电子设备。一个电池组中有两个简单板:
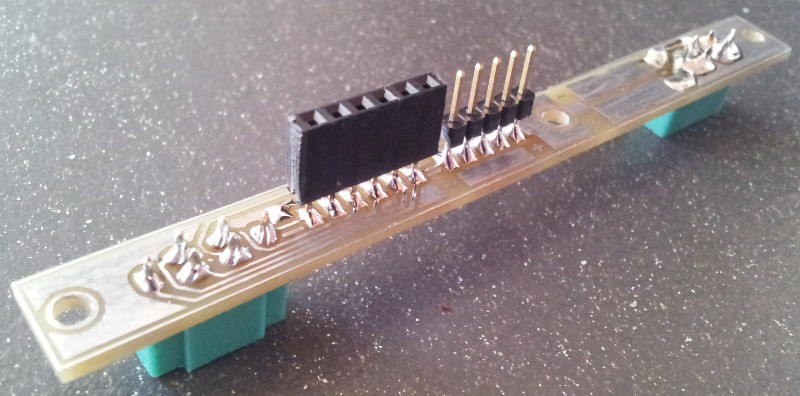
正如你可以看到相当简单,只需一堆连接器和焊盘,以连接一切并行,并提供安装选项。Pcb 是通过碳粉传输自制的 (也许应该在我的自制层压器和蚀刻机上做一个视频。
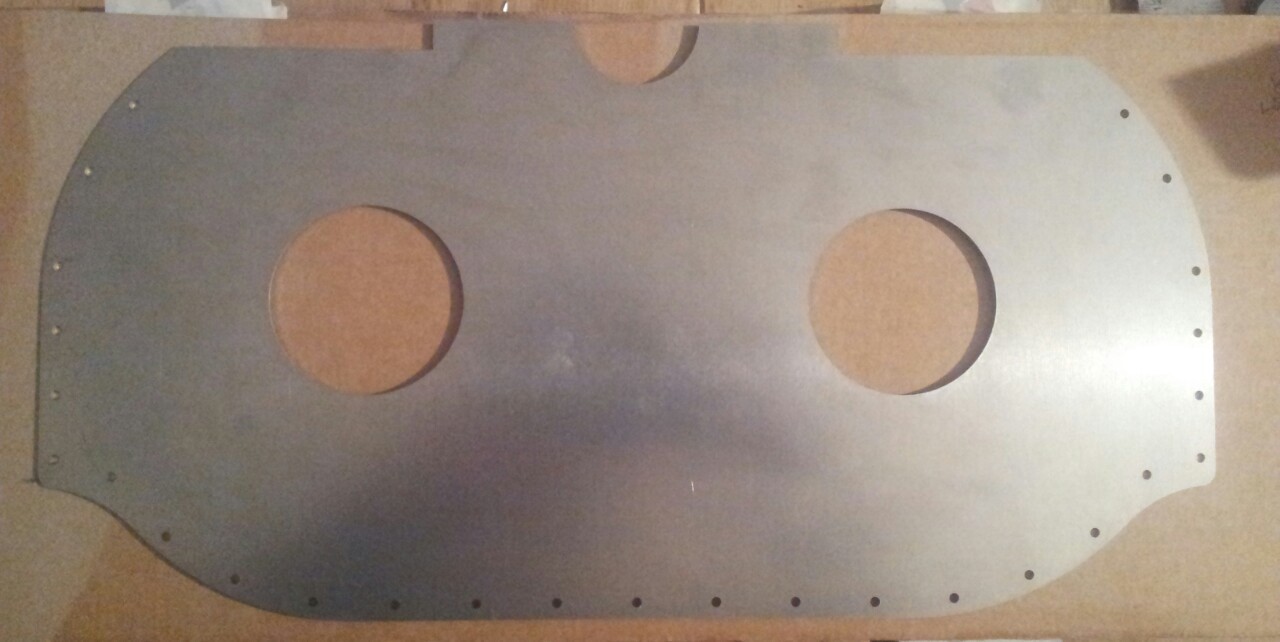
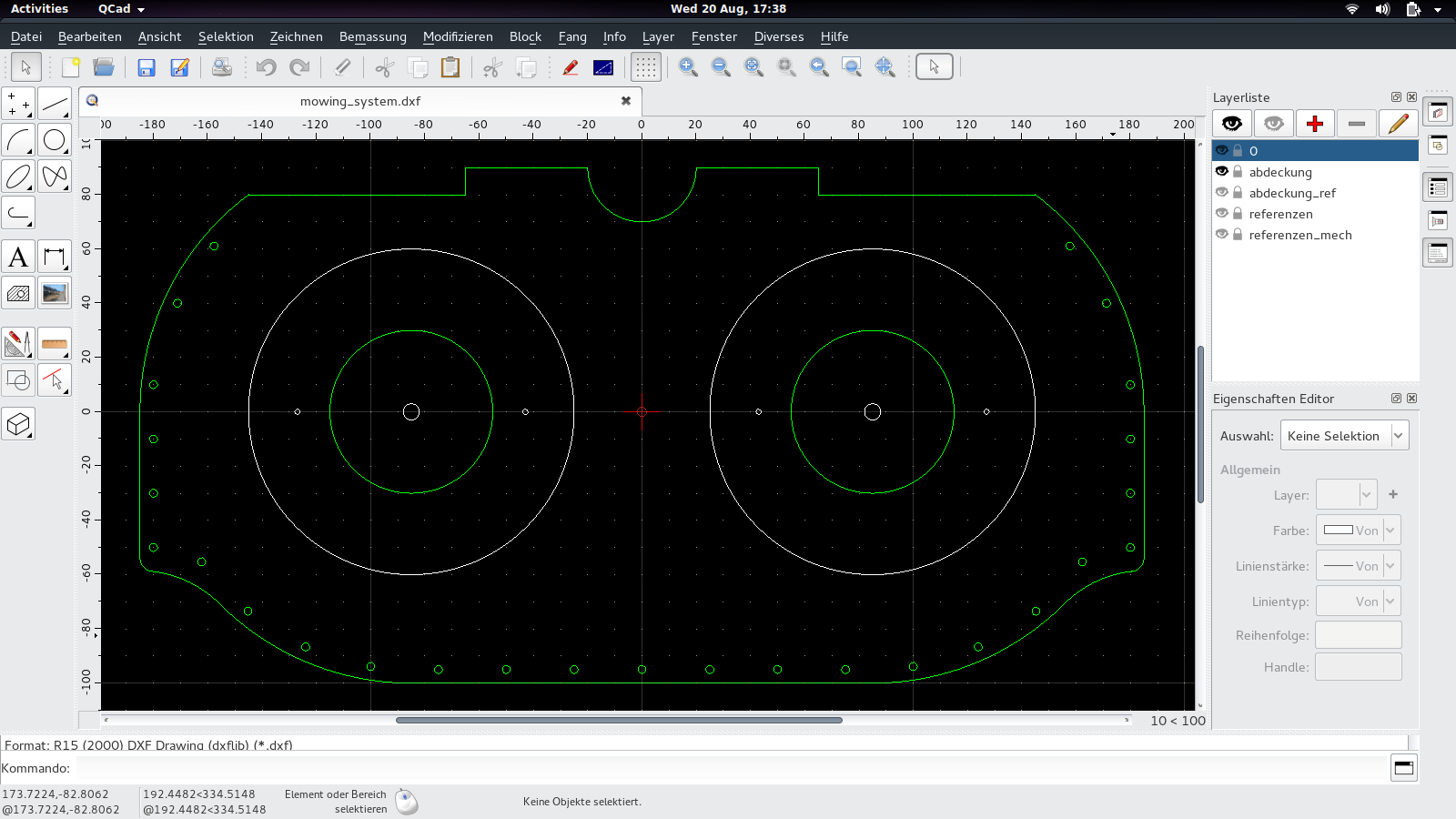
我还购买了割草板和引擎盖, 这将是激光切割从铝:
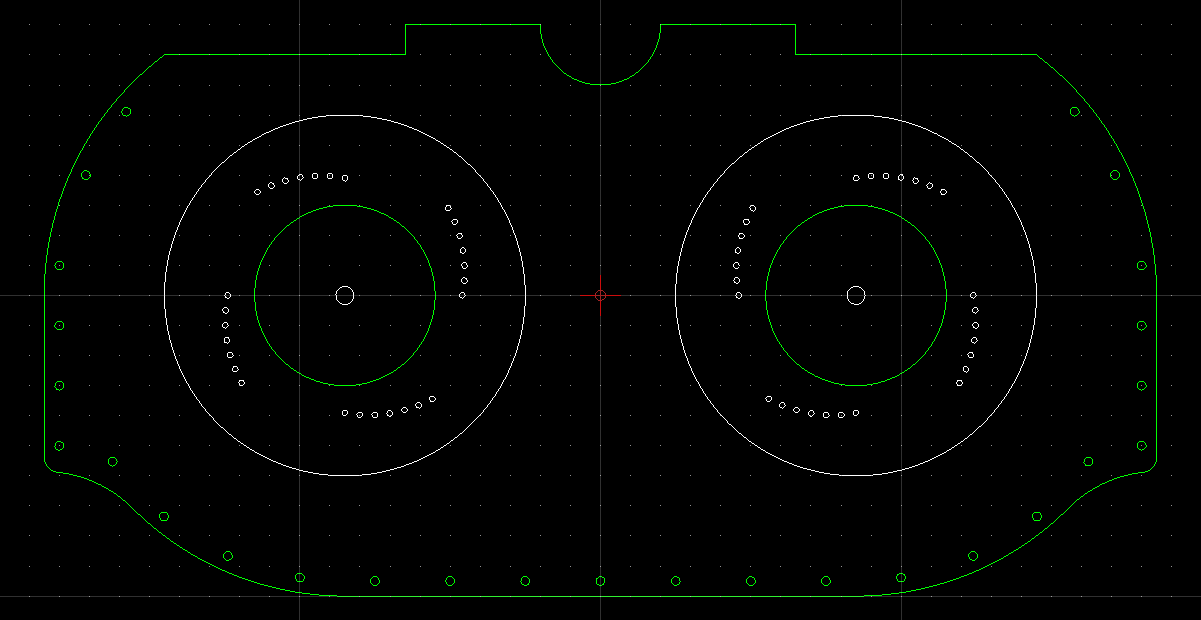
如您所看到的,不同尺寸的刀片和两个或四个刀片每个板可以安装。
正如你可能已经阅读我声称机器人的最终目标是导航通过花园与超声波定位系统。我从构建开始就想到了导航和定位, 但就在最近, 我想到了一些我认为是一个现实的解决方案: 声音
与微控制器处理数据的速度相比,声音移动速度相当慢,因此,精确距离测量变得简单。很有可能你在某个时候真的使用了以下一种:
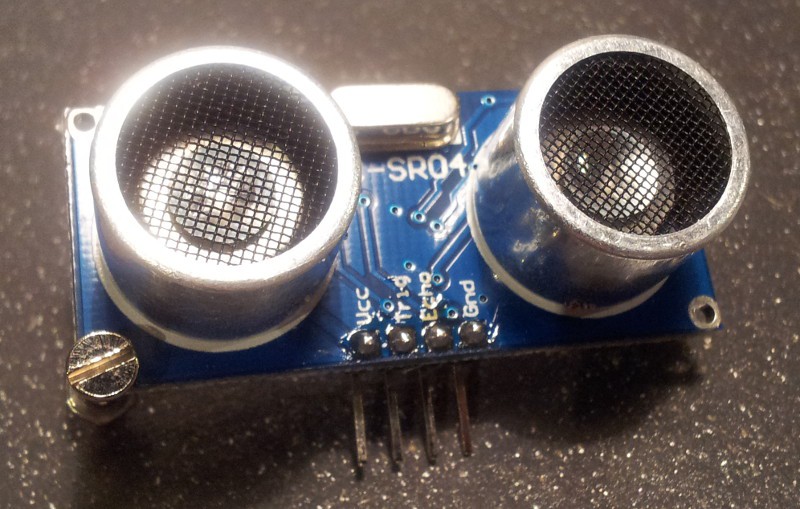
这是一个HC-SR04,一个廉价的([5])超声波距离传感器,被业余爱好者广泛使用。原理相当简单:其中一个圆形的东西是超声波扬声器,它能将短暂的超声波爆发传送到世界上。最终,此声音到达对象并反射到其表面(回声)。另一轮的东西听那个回声。传输和接收之间的延迟是模块发送到您的微控制器,然后可以轻松地计算与微控制器的距离。
现在我想把这个原则更进一步:

主是机器人,具有超声波发射器和超声波接收器。这些节点是带微控制器的小型电路,还配备了发射器和接收器。要计算主服务器的位置,它需要:
了解节点
了解到每个节点的距离
了解节点位置
超声波的声音来了:主机发送几个位编码为超声波爆发,包括节点ID,它想知道的距离。节点会做出相应的反应,下面是一个图表:
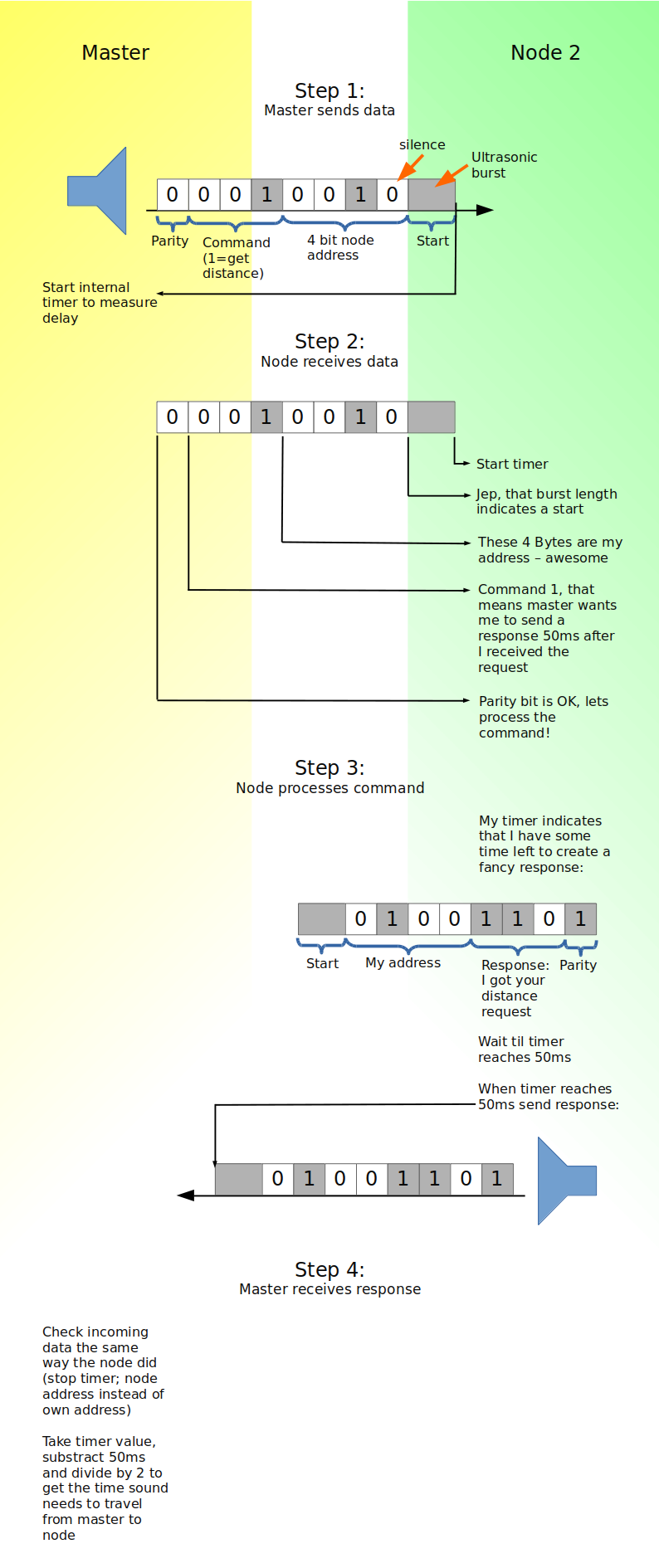
当然,这只是一些概念,以提出基本的想法。在现实中,它可能会派上用场添加独特的消息ID来取消回声等。
了解节点位置
从理论上讲,网络可以通过测量节点之间的距离来校准节点位置本身(主发送命令,如:"节点 2:测量您到节点 4 的距离并向我报告!测量各种距离后,应可以填充每个节点的相对坐标。即使这在现实中不能很好地工作, 我很乐意用手 (进入网络界面) 进入位置。
记住,这只是一个概念,谣言在我的脑海。此外,首先要使机器人本身正常工作并建造换电池站。
割草系统被证明是最难解决的部分之一。当然,机器人不能像汽油动力的竞争对手那样快割草,因此它需要非常沉默来补偿更长的噪音帧,而不是惹恼邻居。
我决定放弃轴承,因为完全调整电机与轴承,同时保持一个连接,承受巨大的扭矩超出了我的能力。(请注意,我最先进的工具是无绳电动螺丝刀/钻头)。这应该不会太大的问题,因为这种电机的成本[2.5],这些可能需要更换无论如何,因为他们有刷子。
电机轴的连接方式:
(我看真实的东西时看不到弯曲 - 不知道相机还是眼睛都断了。为了尽量减少振动,我会再次制作这些尽可能精确,并安装激光切割盘片给他们:
发动机罩(绿色)也将从铝激光切割。直侧用于安装垂直活门。它们不仅可以防止草(和泥浆)飞来飞去,还可以感应到叶片是否即将接触地面。我们的花园(可能还有其他花园)有很多小洞。这不是后轮的问题(前置提示有点),但与前轮,它偶尔发生,刀片卡住。设计尚未完成,但运行此服务的公司正在运营休假。
在一个较长的测试中,我之前做了字符串修剪器(两个电机上都有字符串)结果使用的能量太多。RPM 需要非常高才能真正切割草,而不仅仅是弯曲它,这使得它比刀片更嘈杂。这个想法很棒, 但我会坚持刀片。
几个位改进
更新的事物:
- 购买了操纵杆, 以取代糟糕的游戏板
- 电动高度调节工作(添加线性电位计和软件)
- 正确安装保险杠
待办事项列表中的以下项目:
- 从铝中重新制作保险杠, 因为这个爱好玻璃的东西只是不是真正的交易
- 继续电池组(需要找到一些弹簧加载触点,可以处理30安培)
- 建立适当的(噪音和振动)割草板(虽然我还没有一个好主意)
由于以几千 RPM 转速旋转的锋利刀片可能会对事物造成严重损坏,因此实施某些安全功能可能是一个聪明的主意。所以我构建了这个:
评论
0 / 100
查看更多
2020-08-15
1198

Copyright © 2024 苏州硬禾信息科技有限公司 All Rights Reserved 苏ICP备19040198号