Hackaday.io上机器人的项目-DIY业余伺服四足机器人
收藏
分享
脑图
Hackaday.io上机器人的项目-DIY业余伺服四足机器人
Hackaday.io上机器人的项目-DIY业余伺服四足机器人
图片


描述
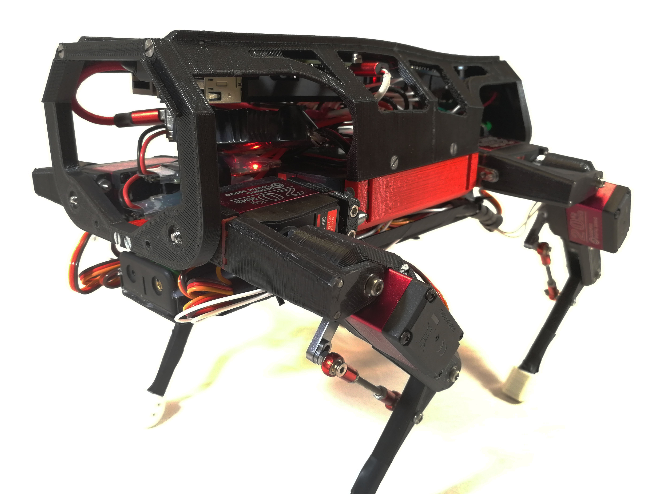
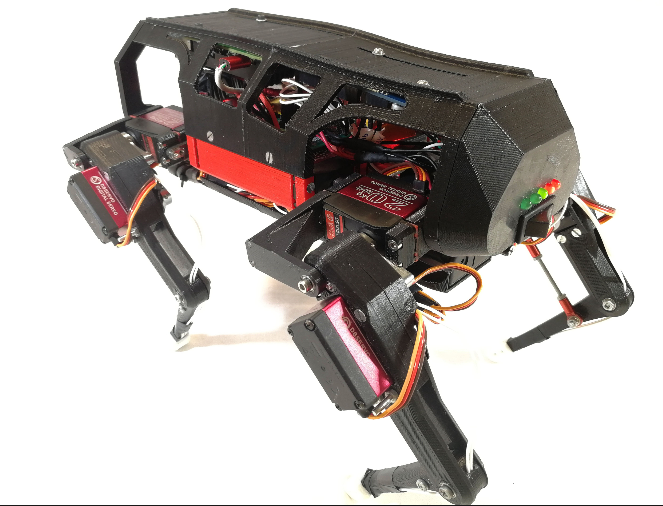
我是物理学的本科生,对解决纸质问题感到无聊,因此决定解决和应用现实世界中的问题,因此我开始了这个机器人项目,目的是将自我介绍给控制理论,研究其数学并练习拼写。
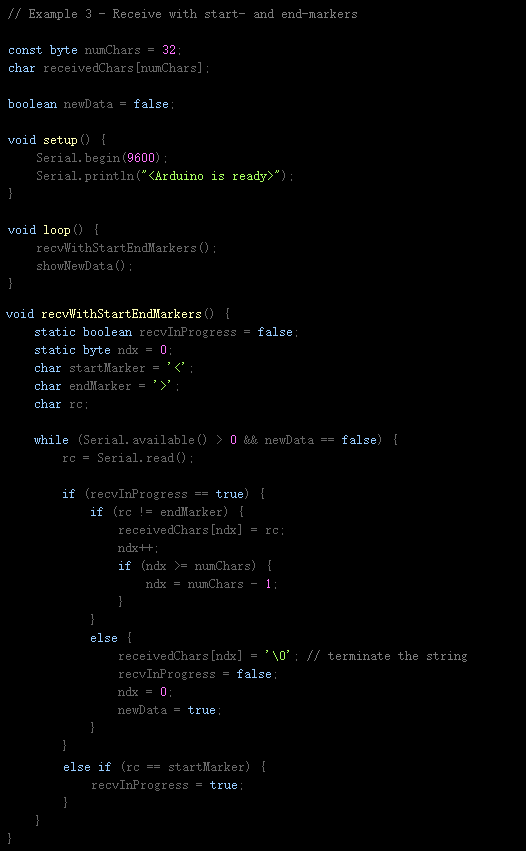
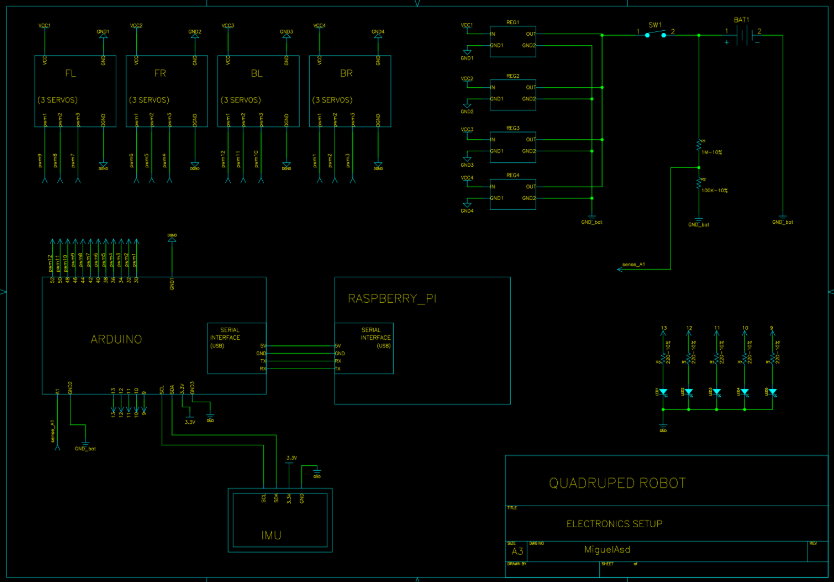
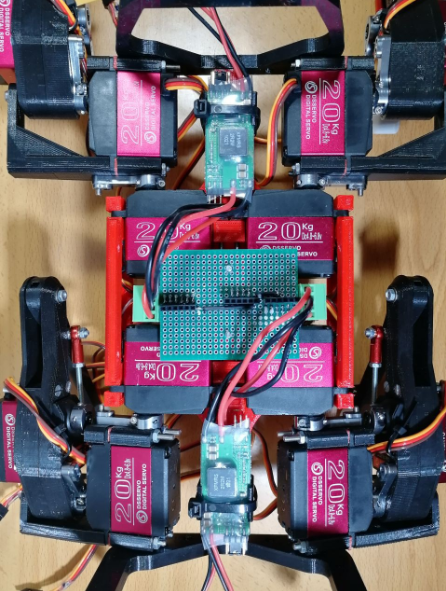
它以Raspberry Pi 4作为大脑运行,外加一个Arduino Mega,用于读取/写入由PS3 Dualshock控制的12个业余伺服器和IMU的信号。
x-zip压缩
x-zip压缩
x-zip压缩
Adobe可移植文档格式
标准镶嵌几何
标准镶嵌几何
标准镶嵌几何
标准镶嵌几何
标准镶嵌几何
标准镶嵌几何
标准镶嵌几何
标准镶嵌几何
标准镶嵌几何
标准镶嵌几何
标准镶嵌几何
标准镶嵌几何
标准镶嵌几何
标准镶嵌几何
标准镶嵌几何
标准镶嵌几何
标准镶嵌几何
标准镶嵌几何
标准镶嵌几何
标准镶嵌几何
标准镶嵌几何
标准镶嵌几何
标准镶嵌几何
标准镶嵌几何
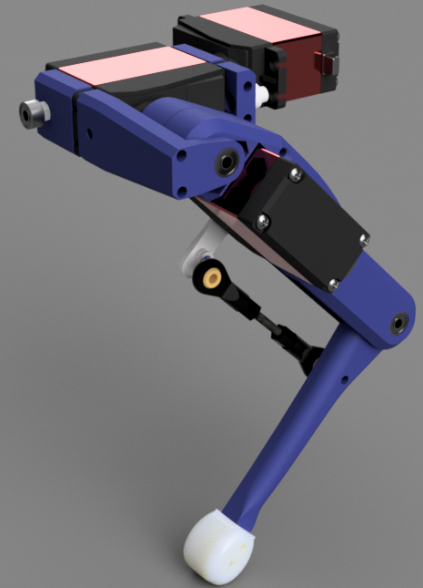
伺服DS3218 PRO版本。
20 kg / cm扭矩和0.1 s /60º。
伺服系统的金属喇叭。
Plastic one are not a choose, as they generate play.
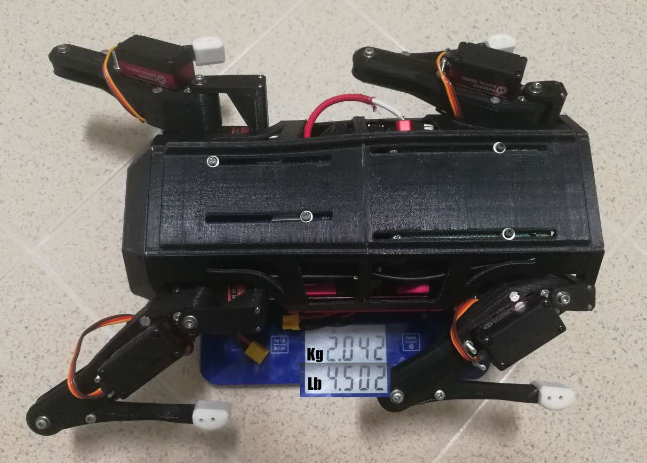
2个串联的18650电池座(7.4 V)
8x3x4 mm轴承
(下x内x宽)
MPU6050 IMU。
加速度计+陀螺仪。
Arduino Mega。
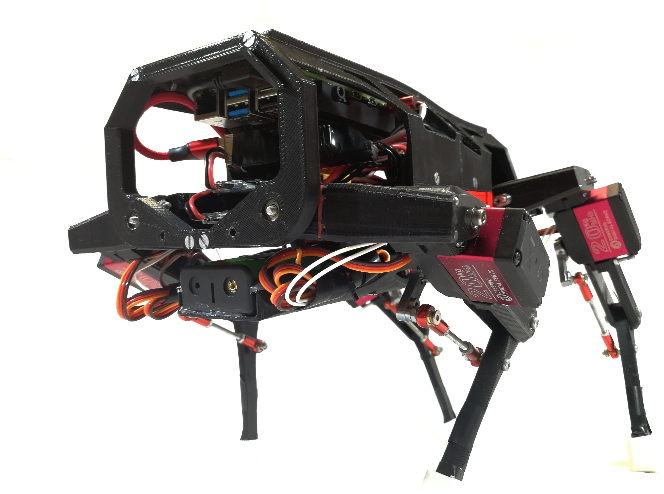
树莓派4。
1Gb RAM。
遥控器
就我而言,原始的ps3控制器DualShock 3。
批量转换器。 5V 3A用于树莓派电源。
HENGE UBEC 8A / 12A峰值
可选择5V-6V-7.4V。
18650 LITIO电池
使用BMS。
图1-1
图1-2
图2-1
图5-1
图7-1
1、建筑物处所。
图a-1
2、构建并打印机器人。
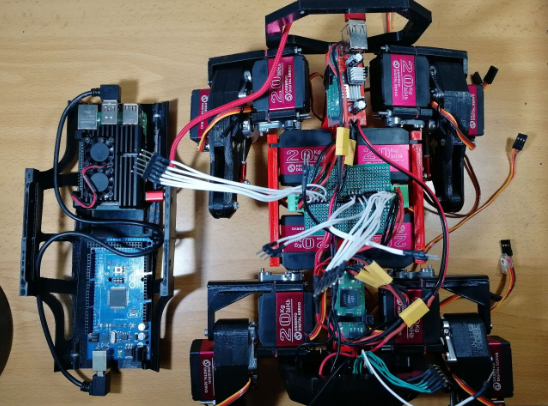
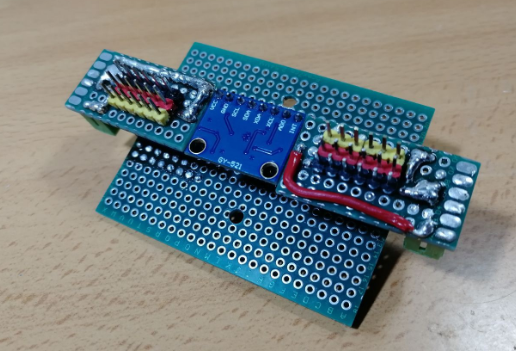
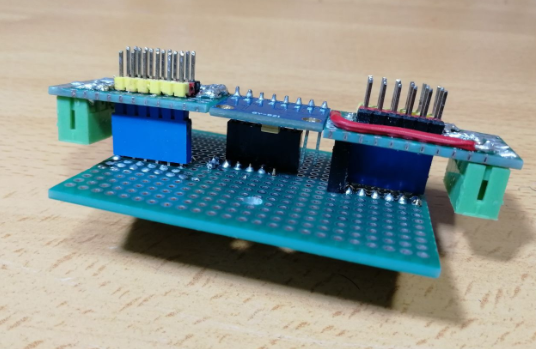
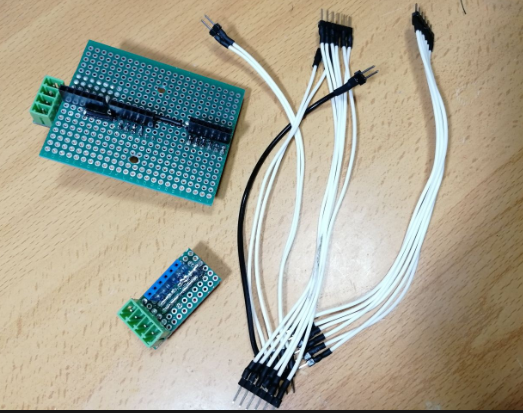
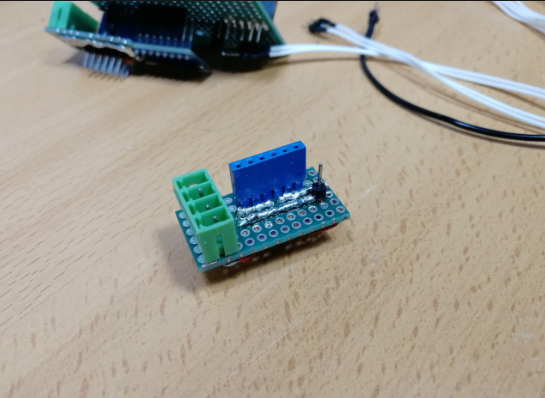
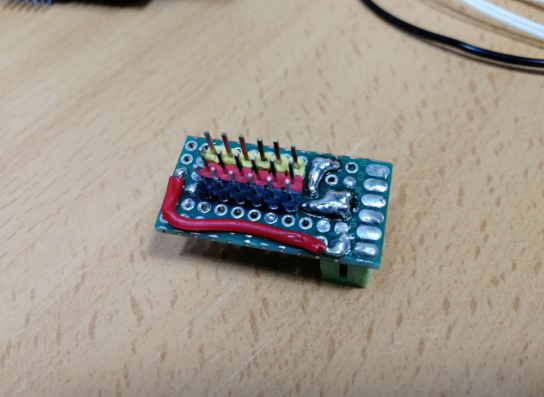
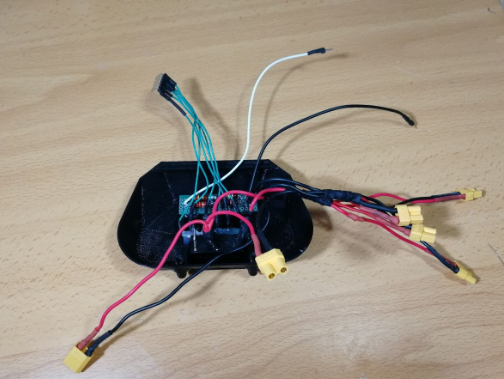
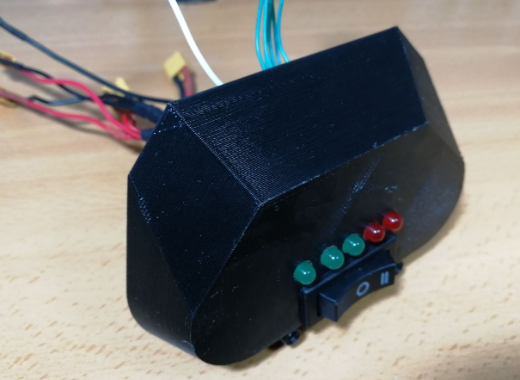
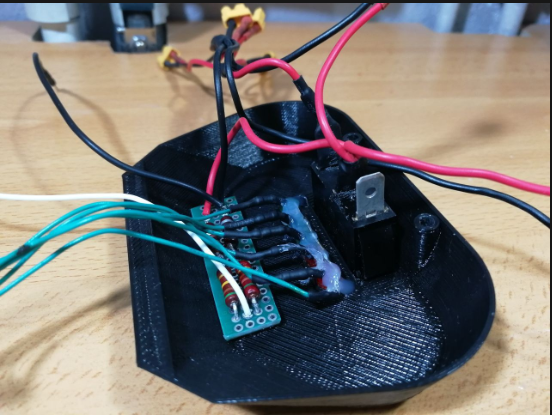
3、电子产品。
图c-1
图c-2
图c-3
图c-4
图c-5
图c-6
图c-7
图c-8
图c-9
图c-10
图c-11
评论
0 / 100
查看更多
2020-08-13
1651

Copyright © 2024 苏州硬禾信息科技有限公司 All Rights Reserved 苏ICP备19040198号