Hackaday.io上机器人的项目-MABEL-波士顿动力学启发的平衡机器人
收藏
分享
脑图
Hackaday.io上机器人的项目-MABEL-波士顿动力学启发的平衡机器人
Hackaday.io上机器人的项目-MABEL-波士顿动力学启发的平衡机器人
图片


描述
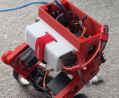
MABEL是一种开源自平衡机器人,其灵感来自波士顿动力公司著名的手柄机器人。 该机器人由Arduino控制,该Arduino根据从MPU-6050加速度计/陀螺仪接收到的角度来处理所有PID计算(基于开源YABR固件),而pi管理蓝牙和伺服控制,运行逆运动学 该算法可将机器人的腿完美地沿两个轴平移。MABEL的目标是创建一个负担得起的腿式平衡机器人平台,例如Boston Dynamics Handle机器人,该机器人平台可以使用便宜的Amazon零件以嗜好规模构建。
通过具有带有铰接式腿的平衡平台,MABEL将能够主动平衡多个轴,并根据周围环境改变腿的长度,以增加地形和越野性能。
MABEL建立了用于PID控制器的开源YABR项目,但增加了伺服器和pi,可帮助它们进行接口并控制所有内容
用于CAD修改的项目文件。
齿轮驱动腿部。 3D打印4倍。
3D打印LowerLeg.stl 2x
外壳可容纳2800mAh锂电池。 只需要一个。
侧板用于固定上舵机并驱动大腿段。 3D打印2倍。
Top of the Body. 1x
机器人主体的底部。 1倍
锅架支架,用于头部移动机构。 打印1x。
上身部分。 列印1x
头部移动机构的倾斜支架安装。 打印1x。
大腿部分。 打印2 x-每条腿印一次
滚轮(可选-可以使用自己的滚轮)-打印2倍
3D打印指定的每个组件
(可选)-橡胶O形圈或易碎的材料
我使用了自己的3D打印车轮,并在周围包裹了橡胶O形圈,但是您可以购买自己的车轮或使用诸如松紧带之类的其他东西来达到相同的效果。
PCA9865伺服控制器
覆盆子pi的理想HAT
可变电压调节器
一种用于Pi和arduino等5V设备,另一种用于7.4V伺服电源
铝制伺服喇叭(MG996R)
直径10mm的轴承(5mm内径)x 4mm
其中的2个用于每个接头,并用虎钳或先用吹风机将其软化后推入腿部。
10mm M3螺栓
用于固定步进电机-请超额购买
15mm M5螺栓
用于保护身体-请再次购买更多,因为随着项目的进行,我将使用更多
30mm M5螺栓
这些用于关节和枢轴
15mm M4螺栓
将伺服器固定在腿上
M5防松螺母和垫圈
您至少需要这个数量
Raspberry Pi零W
Arduino Uno
MG9966金属齿轮伺服
38mm NEMA 17步进电机
A4988(OR DRV8825)步进电机驱动器
Arduino CNC防护罩
MPU-6050陀螺仪/加速度计
11.1V 2800mAh 3S LiPo(+ LiPo充电器)
评论
0 / 100
查看更多
2020-08-13
1682

Copyright © 2024 苏州硬禾信息科技有限公司 All Rights Reserved 苏ICP备19040198号