Hackaday.io上机器人的项目-开放式个人助理机器人平台
收藏
分享
脑图
Hackaday.io上机器人的项目-开放式个人助理机器人平台
Hackaday.io上机器人的项目-开放式个人助理机器人平台
图片

描述
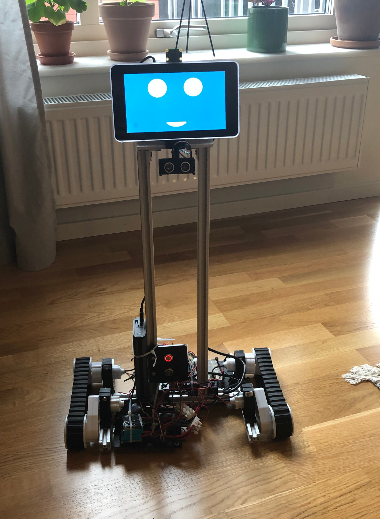
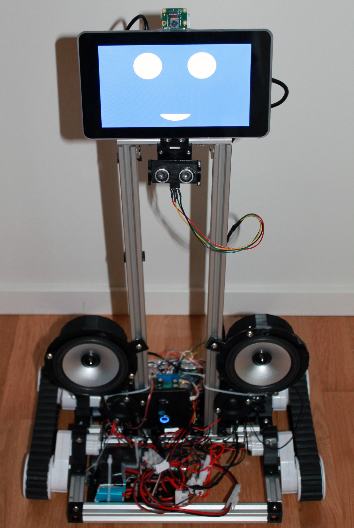
目标是创建一个语音控制和远程操作的开源模块化机器人平台。 它具有通过开源Mycroft AI提供的普通语音助手的全部功能,但可以通过机器视觉跟随您并查看周围环境。 我还给了助手一个友好的面孔,以使其更易于连接。
最终目标是可以将其用作老年人护理中的帮助。 我们很多人面临的问题是在covid-19期间无法安全地照顾我们的老年亲戚。 机器人助手可以帮助您提醒服药的情况,可以添加一个托盘来帮助搬运东西,通过与机器人交谈来陪伴他们,并使其播放您喜欢的音乐或播客。 您也可以将其用于远程操作,以便与亲戚交谈并进行检查。
细节
目标
该项目的目标是使机器人能够在家完成小任务。 通过远程操作,部分自动化或完全自动化。 随着时间的推移,自动化任务的目标越来越多。 还有一个友好且易于使用的界面,使其易于使用。这对于需要帮助但有感染COVID-19,流感或其他任何疾病的风险的老年人或残疾人特别有用。 该机器人可以减少人与人的接触并减轻一些小任务,这些任务在例如弯腰困难或坐在轮椅上等困难的情况下可以完成,其中一些示例任务可能是通过物体检测帮助为宠物装满水和食物的碗 在家里找到东西,或者浇花。
开源的
因此,计划是使所有内容都开源,但是,在开发机器人时,我不会将其公开。 主要有两个原因,所以我在开发机器人时会进行很多更改,因此我认为最好承担开发成本,而不是让想要构建项目的人必须尽快购买新零件 改变一些东西。 我也在做视频流和远程操作,在这些部分的软件中存在安全漏洞会带来很大的后果,因此我真的想在公开代码之前解决所有安全问题。
设计
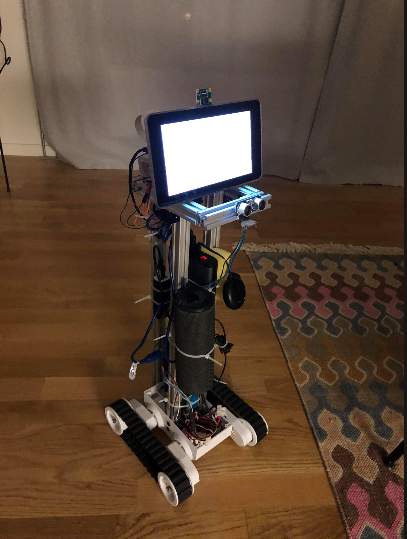
从一开始就将设计保持在非常简单的位置,将重点更多地放在软件方面。 我将尝试使用便宜且容易找到的组件。 现在,我有一个简单的底座,该底座建立在现有的机器人平台上,并附有20x20铝型材,作为用于安装组件的框架。 在“头部”上有一个7英寸触摸屏,用于显示动画面孔并有可能用作输入设备。目标是首先为机器人建立一个良好的基础,并提供模块化附件。
软件
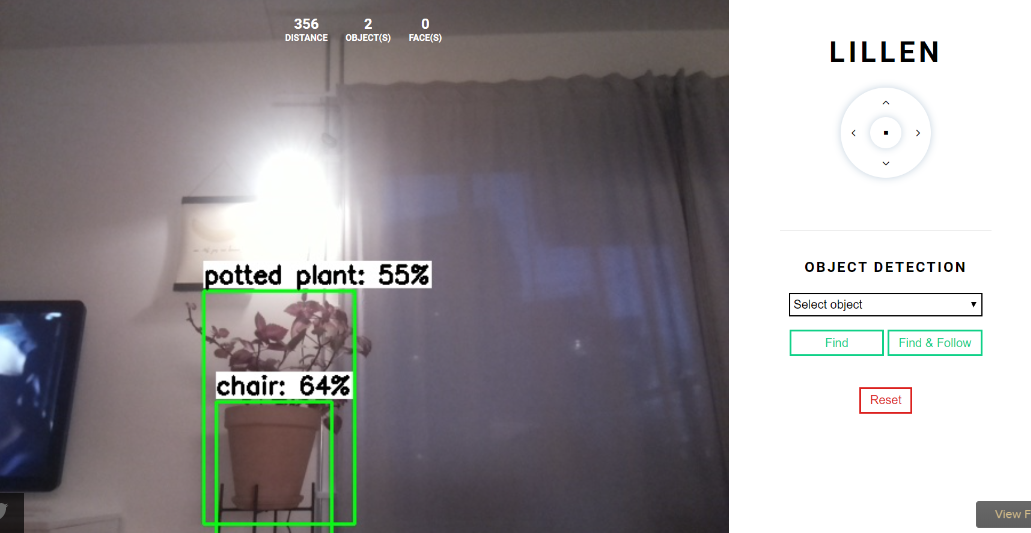
我正在使用Tensorflow进行对象检测和面部识别。 python脚本,用于从arduino读取传感器数据并将实时视频流式传输到服务器,并使用Socket.io向机器人发送实时命令,以便能够对其进行远程控制并启动不同的指令,例如唯一的i 现在具有“跟随”模式,该模式使用对象检测来跟随所选对象。Mycroft AI用作语音助手来发出命令,播放音乐等。
在这里,您可以看到对跟随模式的早期测试。 此后,我们做了进一步的改进,主要是为了加快物体识别的速度,我将很快发布更多的视频。
树莓派4
Arduino Uno
30W高音扬声器
Raspberry Pi 7英寸触摸屏
树莓派相机
HC-SR04
USB麦克风
带编码器的直流电动机
调速器(我曾经躺在的旧控制器,将要更换)
夏普红外距离传感器
60W 88dB扬声器
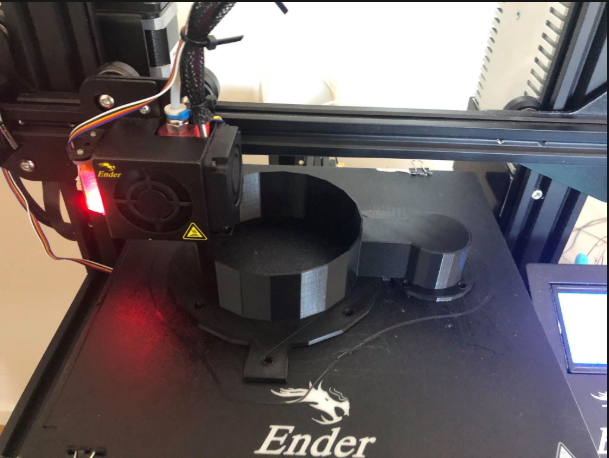
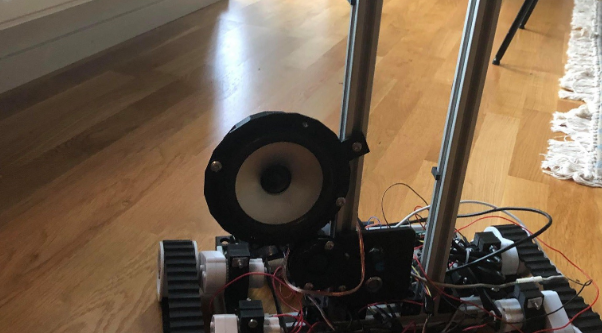
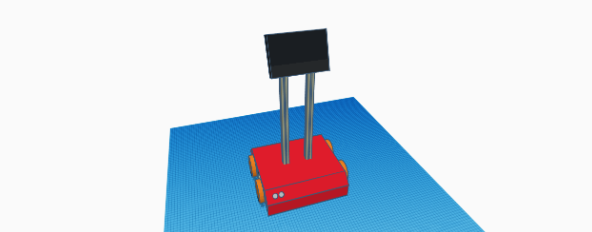
图7-1
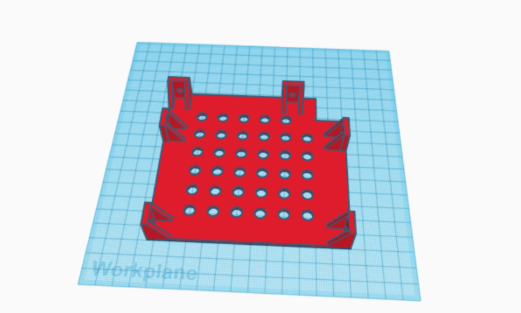
图7-2


当前正在打印和测试很多零件。 在这里打印新的马达支架。
评论
0 / 100
查看更多
2020-08-13
1198

Copyright © 2024 苏州硬禾信息科技有限公司 All Rights Reserved 苏ICP备19040198号