Hackaday.io上机器人的项目-“善恶”:另一个Sawppy项目
收藏
分享
脑图
Hackaday.io上机器人的项目-“善恶”:另一个Sawppy项目
Hackaday.io上机器人的项目-“善恶”:另一个Sawppy项目
图片



描述
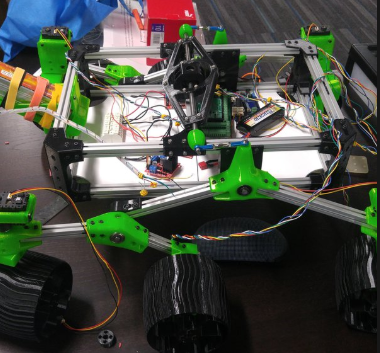
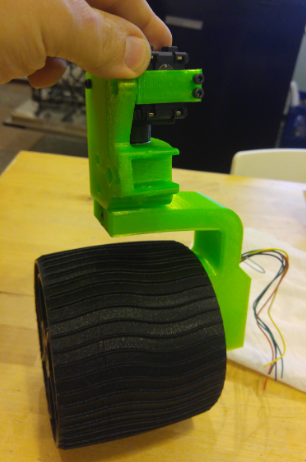
“ Tenacity”是我正在制造的1/4比例的“ Curiosity”式漫游车,用于测试坚固耐用的越野漫游机器人的不同构想和功能。 它基于SAWPPY Rover,最初由Roger在sawppy.com上建造
CHIHAI MOTOR GM25-370直流减速电机6V 100 w /编码器
您可以从速卖通,Banggood,亚马逊,eBay等获得这些。
WAGO接线板型号862-515
分支连接,用于将电源从电池路由到电动机控制器,其他板等。
WAGO 221系列电线端子
更多突破,获得更多联系
4mm螺旋电缆包
从Amazon或Grainger等公司获得此电缆,用于电缆控制和布线所有小电线。
Arbotix-M控制器板
控制Dynamixels
博世BNO055 IMU
需要进行自动粗纱,否则是可选的
GPS
需要进行自动粗纱,否则是可选的
各种LiPO电池:14.8V 11.1V 7.4V为不同的位供电。
某种SBC:Raspberry Pi或Jetson TX或Nano。
如果要执行任何形式的自主操作和/或繁重的计算,则需要一个更大的系统。
深度相机:Orbbec Astra,Intel RealSense,Kinect
需要进行自动粗纱,否则是可选的
某种激光雷达
HC-SR04声纳传感器
为了避免短距离碰撞。
Dynamixel AX-12A数字伺服
这些用于转弯
L298N双电机控制板
与Sparkfun或Adafruit的大多数其他产品相比,这些产品可以处理电机的堵转电流额定值,后者通常仅可提供最大2A的额定电流。
Arduino的MEGA 2560
6条马达+ 6针电缆,再加上马达控制器的数字引脚,这是我们需要的许多GPIO。
图3-1
图3-2
图3-3

图4-1
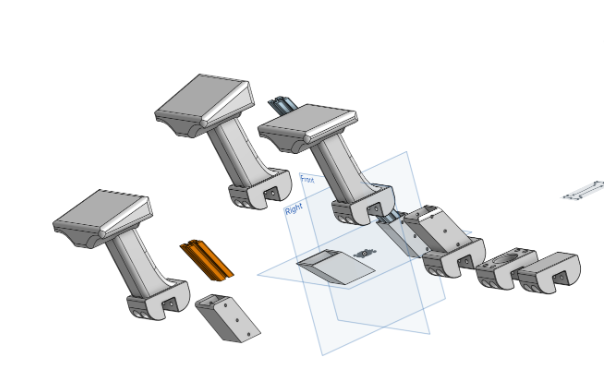
图4-2
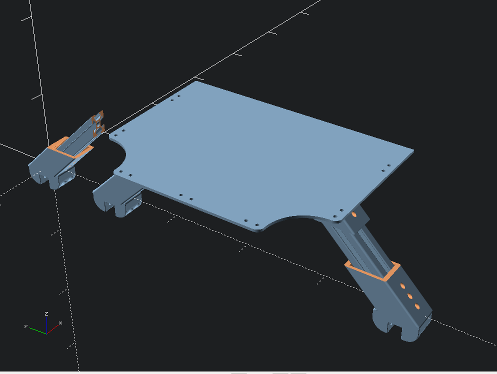
图4-3
图4-4
图7-1

图8-1
图10-1
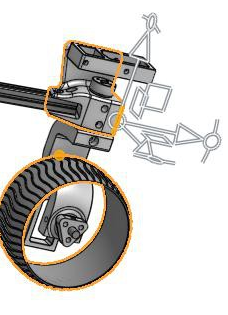
图10-2
评论
0 / 100
查看更多
2020-08-13
1622

Copyright © 2024 苏州硬禾信息科技有限公司 All Rights Reserved 苏ICP备19040198号