Hackaday.io上机器人的项目-把握仿生手
收藏
分享
脑图
Hackaday.io上机器人的项目-把握仿生手
Hackaday.io上机器人的项目-把握仿生手
图片

描述
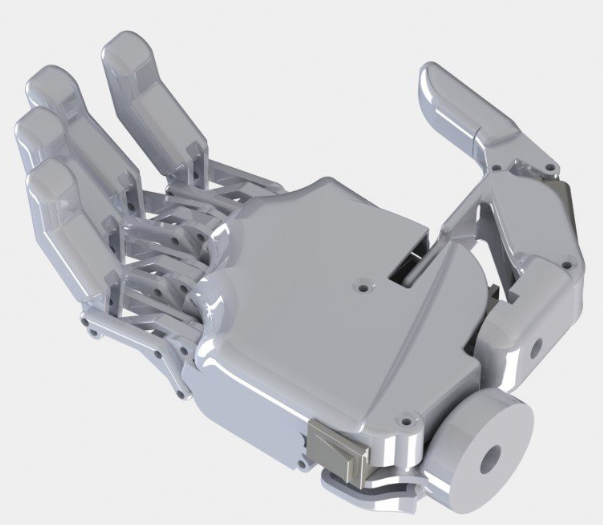
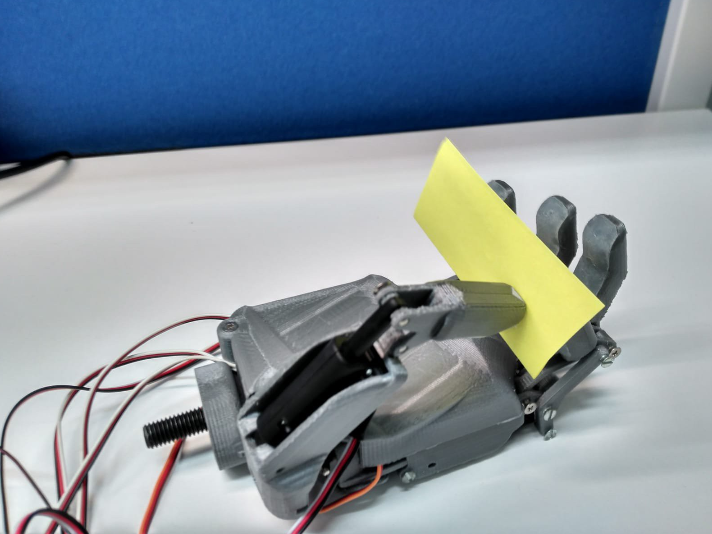
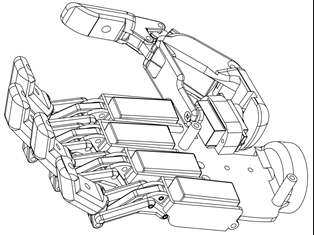
Grasp是基于Arduino Nano微控制器的6 DOF仿生手。 该项目背后的主要设计动机是获得负担得起的假肢,能够对日常活动进行最重要的抓握,可以为DIY社区进行改进,但可以用于不同目的:机器人技术,研究, 教育,爱好。 所获得的功能接近最佳的假肢手:350g,指尖力6.8 N和手指屈伸速度72º/ s。
细节
ino
标准镶嵌几何
标准镶嵌几何
标准镶嵌几何
标准镶嵌几何
标准镶嵌几何
标准镶嵌几何
标准镶嵌几何
标准镶嵌几何
标准镶嵌几何
标准镶嵌几何
标准镶嵌几何
标准镶嵌几何
标准镶嵌几何
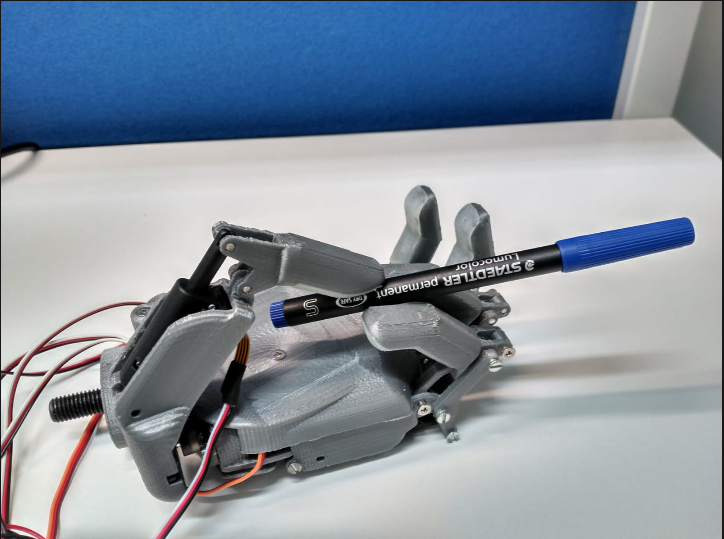
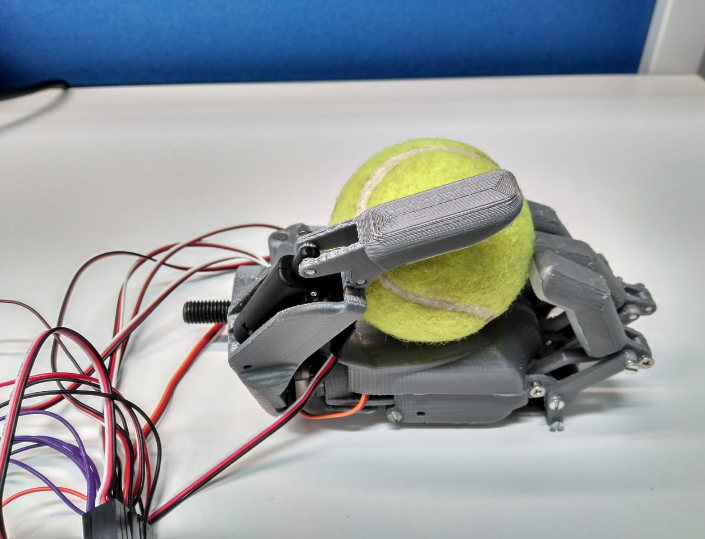
通过手掌上的按钮切换不同类型的抓握模式。
1、摘要
2、列印
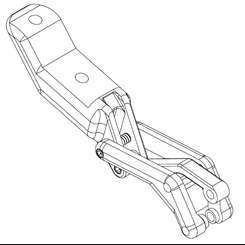
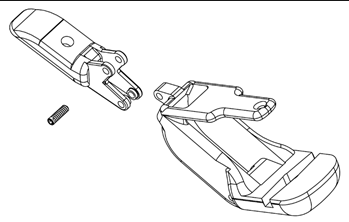
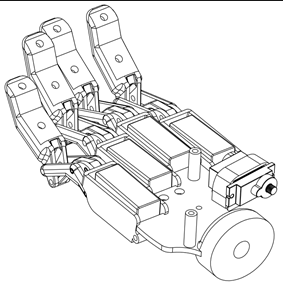
3、手指组装
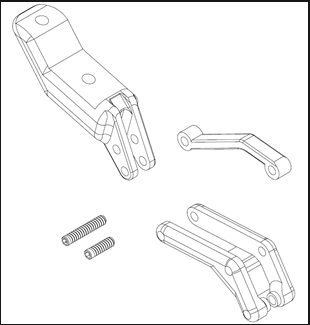
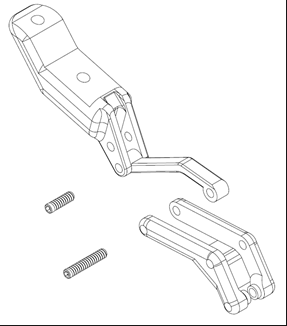
4、拇指组装
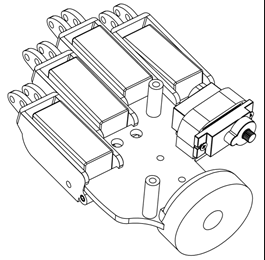
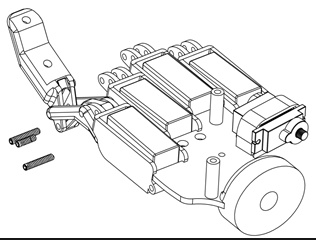
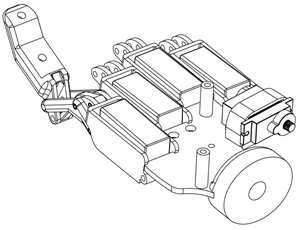
5、将线性执行器插入手掌

6、将线性执行器插入拇指
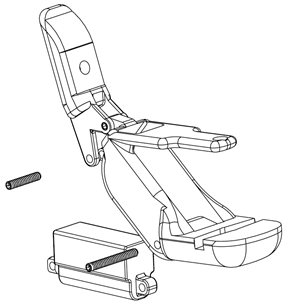
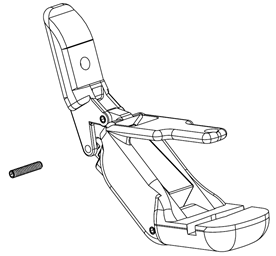
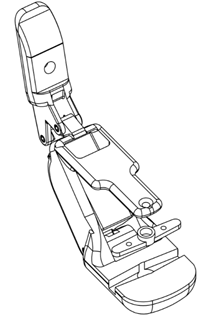
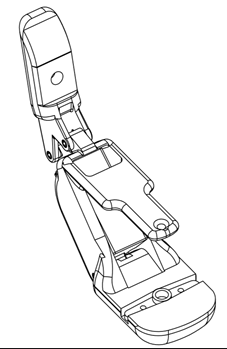
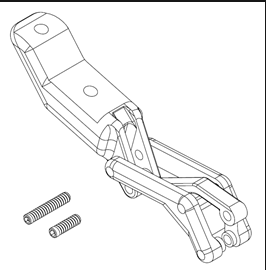
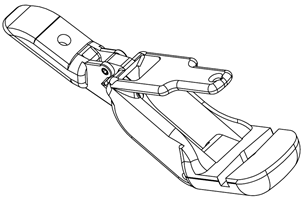
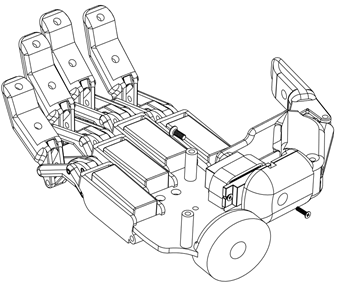
7、手指和手掌组装
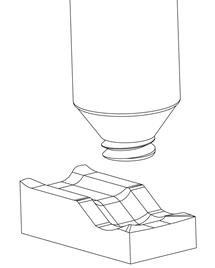
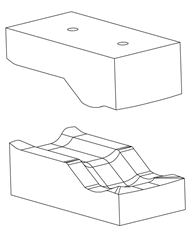
8、将硅树脂浇铸到模具中(等待72小时)

9、将硅橡胶“皮肤”粘在指骨远端
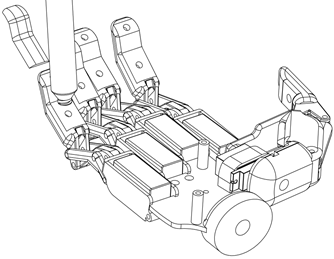
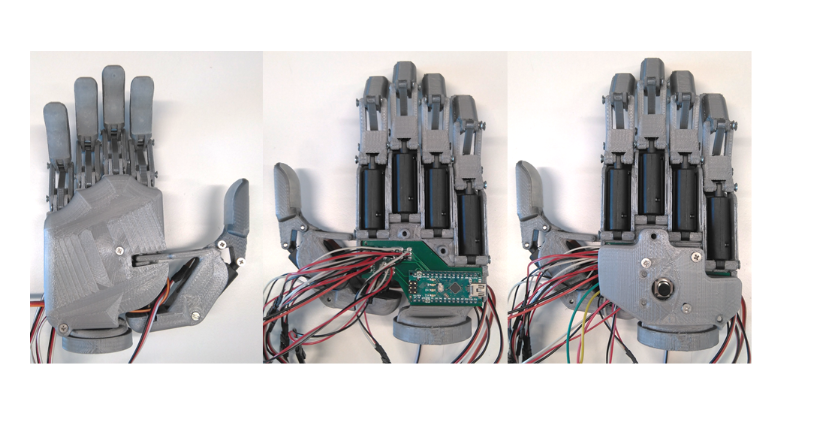
10、电子产品
11、组装封面
12、使用Arduino IDE上传固件
13、13-开始探索!
评论
0 / 100
查看更多
2020-08-13
1565

Copyright © 2024 苏州硬禾信息科技有限公司 All Rights Reserved 苏ICP备19040198号