智能车项目
收藏
分享
脑图
图片

简介:它与避障的功能特性,红外线遥控和蓝牙远程控制系统。
图片
图片
简介;一个开源两人汽车的效率,成本不到一辆新车。
图片

简介:MCL33启发一级方程式赛车设计为最轻和最快型RC一级方程式赛车。
图片

简介:一个简单的tank-drive风格的车,但附带first-person-video护目镜!
图片

简介:Arduino蓝牙智能汽车的功能完整的跟踪、避障、红外遥控等等。
图片

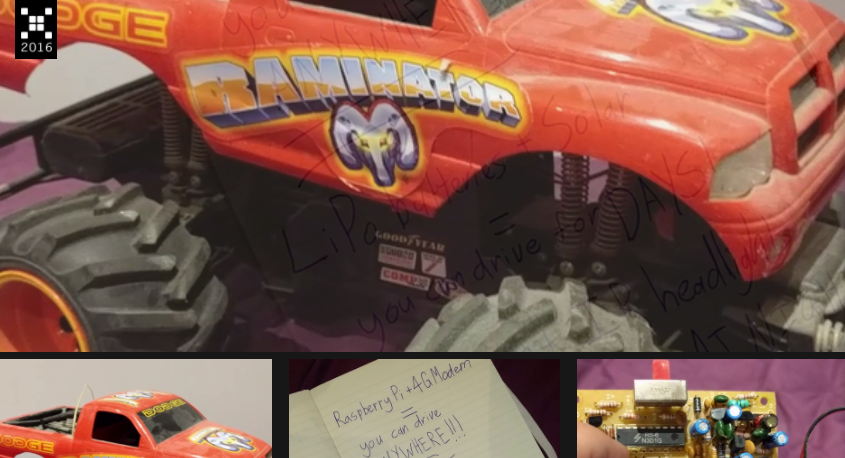
简介:把你的普通汽车变成一个智能汽车与简单的技巧只有50 - 70美元的组件
图片

简介:多功能自动移动智能汽车使用单片机开发应用系统和4轮驱动系统
图片
简介:设计者做这个项目,以建立一个成本有效的监测车,可以在互联网上或在任何私有网络控制。
图片

简介:任何远程汽车转向应用程序控制蓝牙(bie) R / C汽车和添加额外的控制和声音。
图片
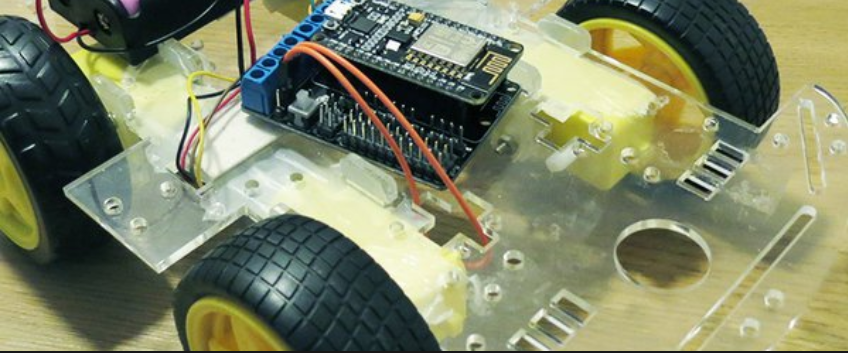
简介:使用NodeMcu esp8266 Blynk的最简单的无线控制的汽车智能手机。
图片

简介:简单的汽车电梯rollator涂一些胶合板,刮水器电机,drivebelt rails和铝。
图片
简介:用attiny - 85和433 mhz模块。尝试做一个基本的RC车。
图片
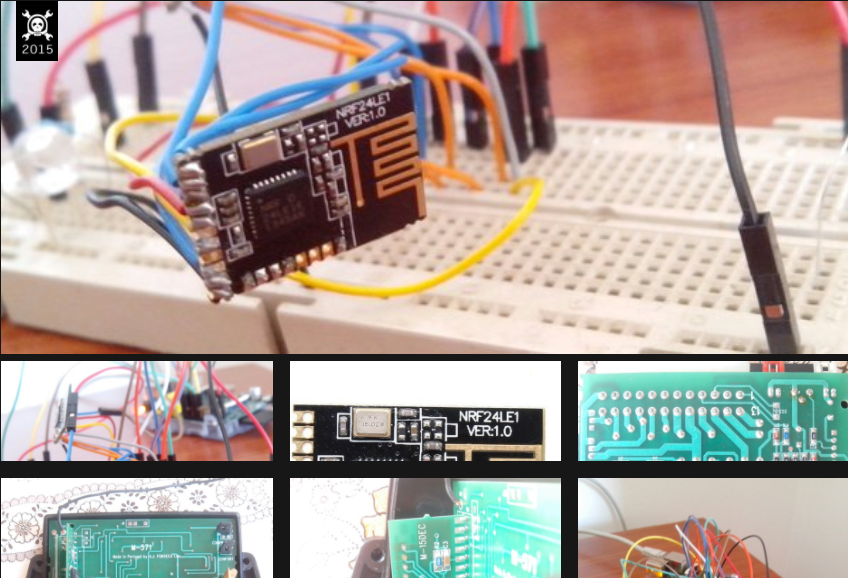
简介:实现一个更安全、更可靠的远程使用nRF24LE1做汽车防盗。
图片

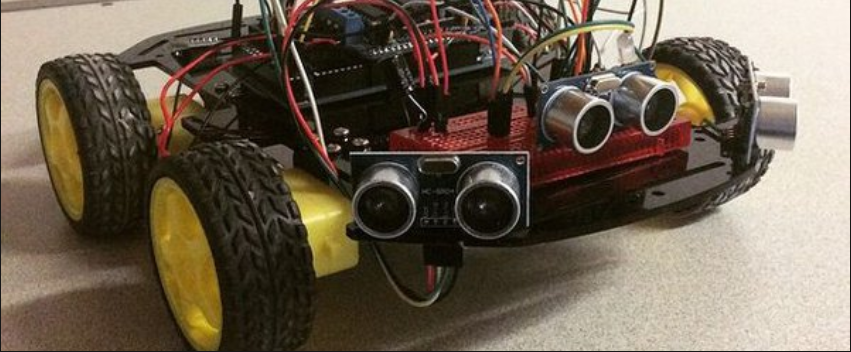
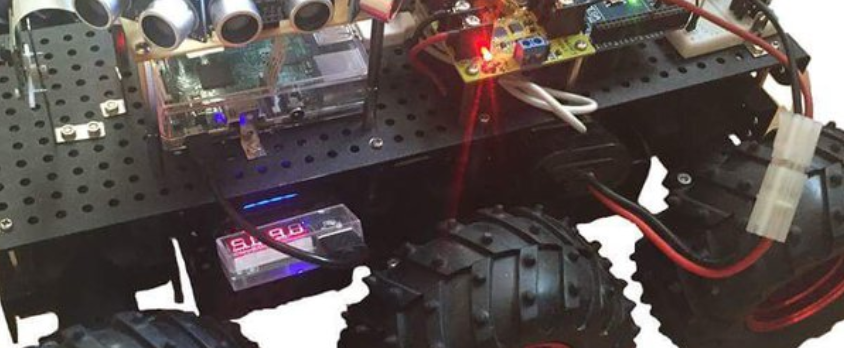
简介:这个机器人是自动的,他自己去转动。一个简单的汽车机器人有:超声波传感器(使信号如果在机器人的前面),arduino UNO微控制器(编程与我们操作传感器,信号和汽车),两个马达(所需移动的轮子的时候)。
图片
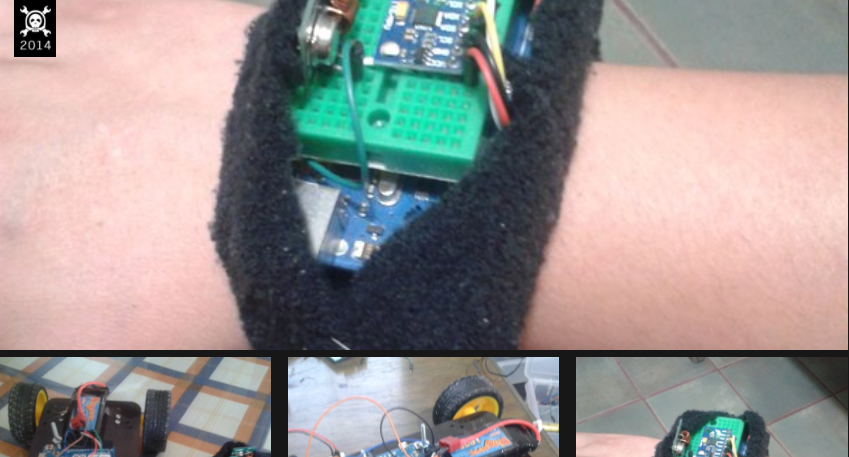
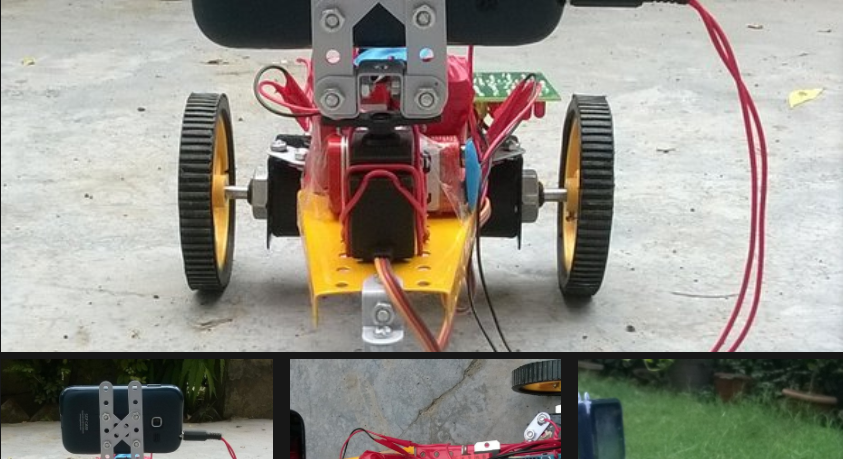
简介:这是一个RC汽车通过手部和臂部的位置控制。
图片

简介:一个几乎完全是3 d打印的坦克配备一个FPV系统来探索和发现未知的事物。
图片
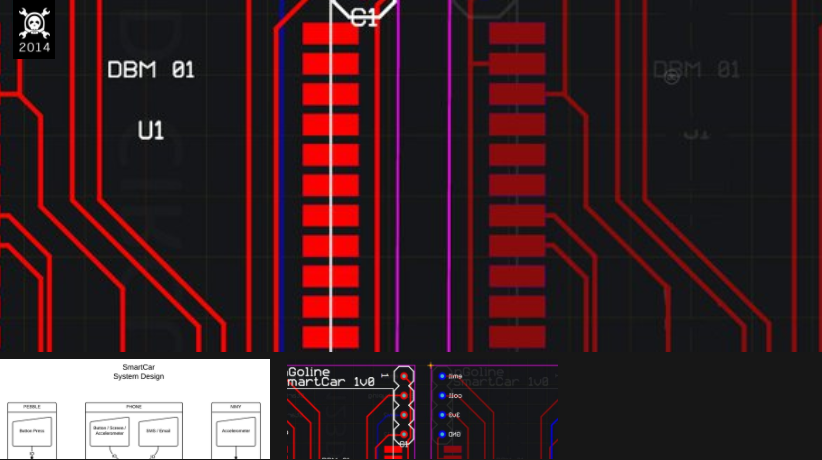
简介:MBoard是一个基于ATMega32U4(达芬奇)芯片集成电机驱动函数Arduino电路板。
使用L298P电机驱动芯片可以驱动两个直流电机或步进电机。
还配备了蜜蜂插座,2.4 g模块界面和SD卡插槽,还ATMega32U4电子积木的I / O端口导致接口,方便连接各种传感器模块。
图片

简介:识别汽车牌,这辆车开到大门摄像头读取汽车板数量检查阅读与数据库数量,如果找到一个,然后打开门,让汽车通过,每辆车在门口拍照,然后发送照片到电报应用与汽车车牌及其地位。
图片
简介:介绍如何构建RC esp8266车。
图片

简介:一辆无人驾驶RC旨在自主跟踪。
图片

简介:一个Arduino农业物联网实验。
图片

简介:用一些简单的插件给复古的电视来添加一些智能和现代化。
图片

简介:本项目主要针对生态可持续性和社会责任通过重用。增加生命周期的效率,减少成本。
图片

简介:项目的主要思想是设计一个太阳能汽车,解决污染问题,燃料短缺和事故。
图片
简介:在克莱奥和反向工程canbus屏幕不用碰电话的创建了一个蓝牙遥控听网络收音机。
图片

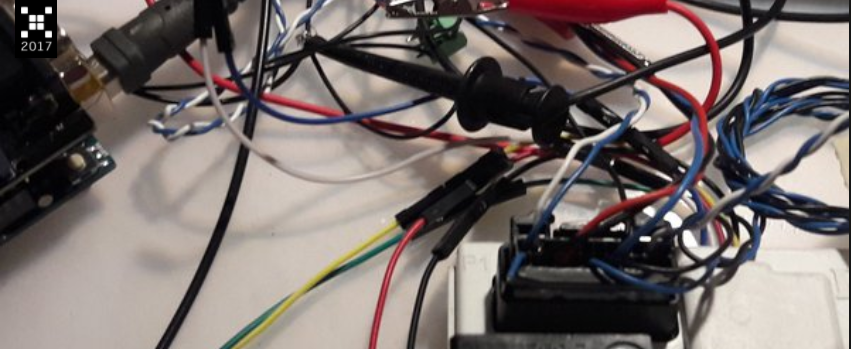
简介:尝试解码车内CAN总线,或许用它来自动化和控制,使用Beaglebone Black 和一个CAN收发记录活动和尝试解码它……
图片

简介:无毒、无铅汽车起动电池能保持使用至少10年。
简介:试图使用一个亚马逊火高清10在一个集成的智能安卓平板平台我的WRX。
图片
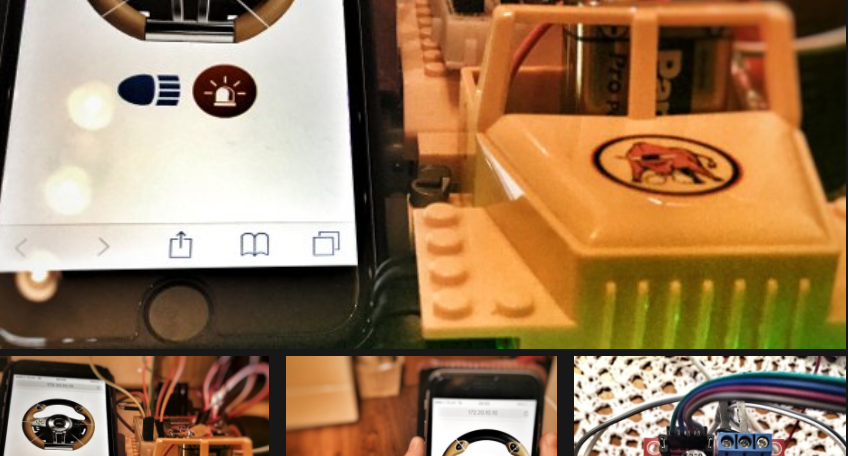
简介:添加额外的小部件,你可以设置尽可能多的按钮,增加功能。替换了红灯点火板上运动传感器,所以如果没有则显示离开。
图片
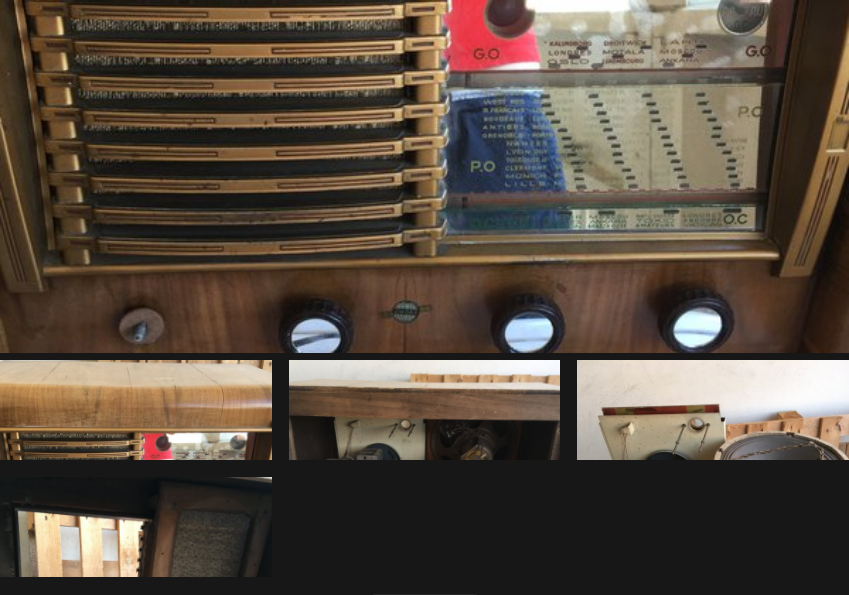
简介 :“HackADay”项目是关于一个老收音机通过无线wifi,蓝牙,和一个聪明的镜子变换成新一代收音机。
图片

简介:项目D0VE是一个程序创建高等学校给学生一个机会来展示他们的创造力通过设计和构建生态友好的汽车我们术语“未来的汽车”。
图片

简介:1995年三菱Eclipse GSX(四轮驱动)转化为纯粹的电力。
图片
简介:本文将致力于开发一个四轮驱动机器人的“目的”是使用一个共同的和廉价的相机ОV7670,将传输图像的相机实时的显现在蓝牙智能手机上。机器人也将能从智能手机上通过蓝牙控制。
图片

简介:Intel Ediso的RC车可以自主的追踪跑步者。
图片
简介:识别机器人汽车上使用AI深度学习覆盆子Pi。
图片

简介:覆盆子果酱控制的小型汽车蓝牙的项目。
图片
简介:Arduino基于半自动的RC车。
图片

简介:基本上CrawlBots是能够开车穿过障碍跨越终点线时会翻转的智能玩具车。车辆故意设计简单:打滑与汽车转向轮(与悬架设计便于实验),没有任何远程控制,传感器包限于 9DOF(加速度计、陀螺仪和磁强计)。
简介:孩子使用BTLE座位传感器和报警,和能量收集方法提醒护理人员被遗忘的孩子。
图片

简介:Fochica,忘记了孩子在汽车警报,没有麻烦,低成本和可扩展的系统,有助于防止忘记孩子的车辆。
图片

简介:组装和程序Elegoo Arduino机器人V2,在这里我将组装进度,然后将开始发布不同的编程指令Visuino。
图片
简介:无线控制的遥控汽车,照相机。
图片
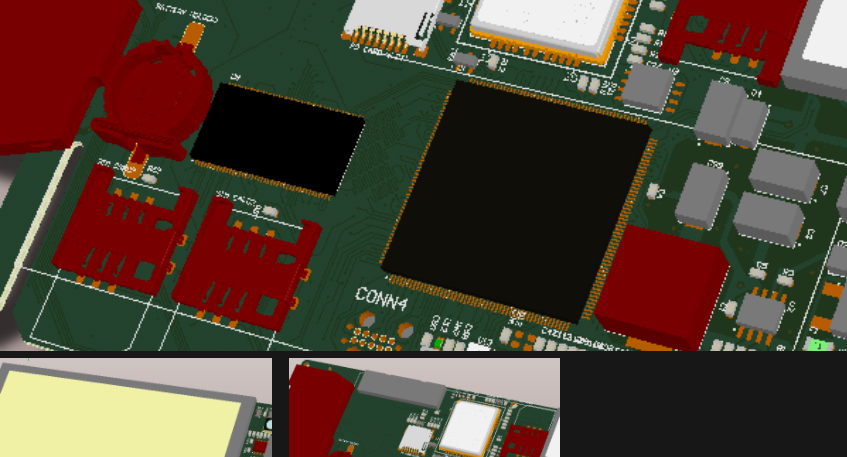
简介:利用LPC NXP单片机的所有能力和使用大量模块和外设,使它适合手臂开始训练。
图片
简介;TKIRV试图建立一个土地可以无限期地在移动网络远程控制。
图片
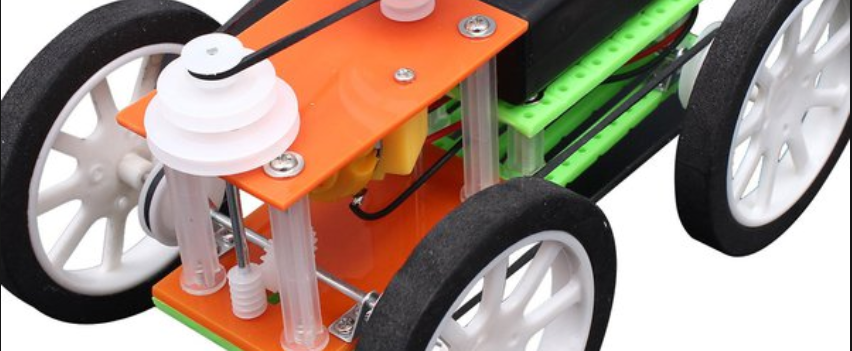
简介:在安装完成之后,通过手动调整皮带在皮带轮套不同直径开车,你可以直观地看到速度和转矩的变化,模型汽车也可以设置两轮驱动和四轮驱动,在装配和游戏的过程中充分欣赏皮带传动的秘密。在组装的过程中,您可以使用锻炼耐心和能力,积极和消极的交换也可以实现可逆直流电机,这样汽车模型就可以向前和向后移动。
图片
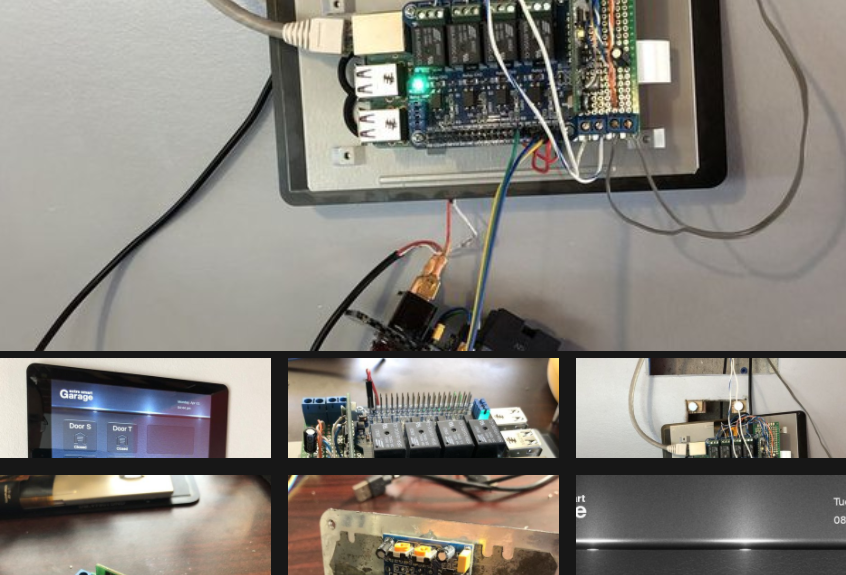
简介:蓝牙4.0设备打开和关闭门,、后车厢和启动汽车。
图片
简介:一个通过声波自主的机器人,这个项目的主要目的是获得新的知识领域的机器人技术在设计和印刷电路板的生产和提高编程技能。添加了一个相机模块,添加了一个代码使机器人讲话,可以测量温度、湿度和亮度视觉的距离。
图片

简介:使汽车将能够使用化学能源工作。将化学能转化为机械能,使车移动。
简介:智能汽车智能城市。
评论
0 / 100
查看更多
2020-04-01
1617

Copyright © 2024 苏州硬禾信息科技有限公司 All Rights Reserved 苏ICP备19040198号